
一种基于点云数据自动增强的三维点云语义分割方法.pdf

Ch****49

1/7
2/7

3/7
4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于点云数据自动增强的三维点云语义分割方法.pdf
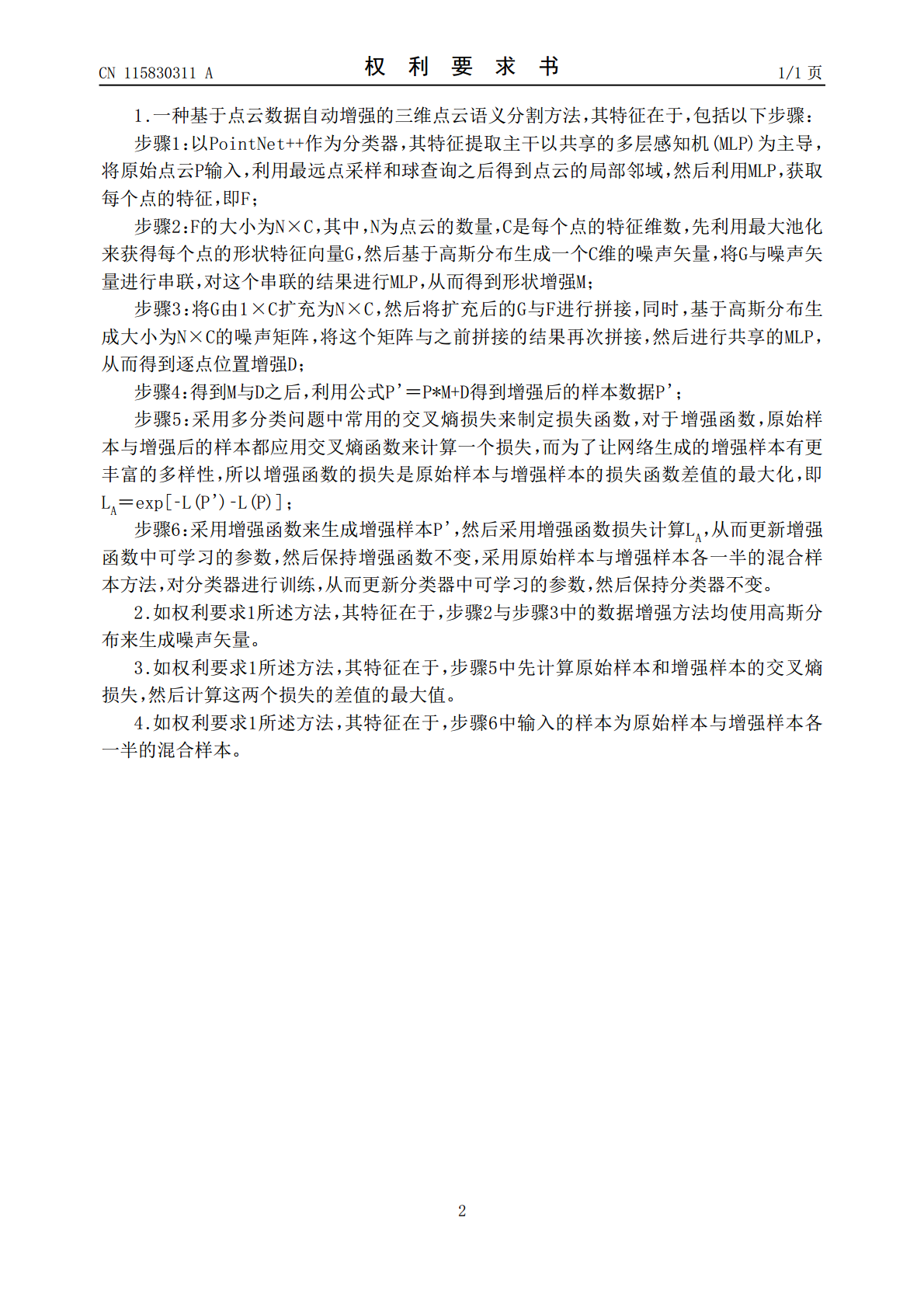
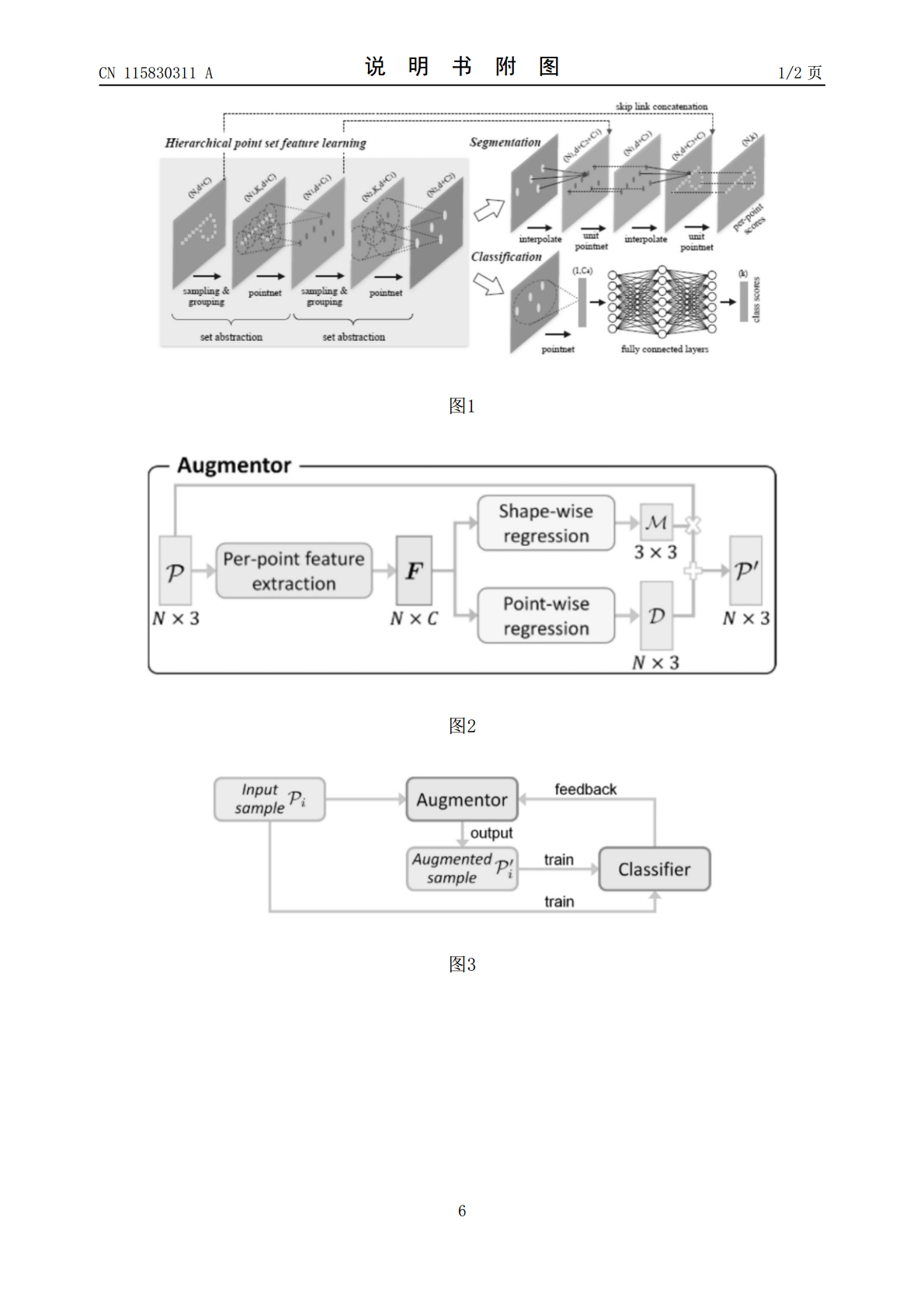
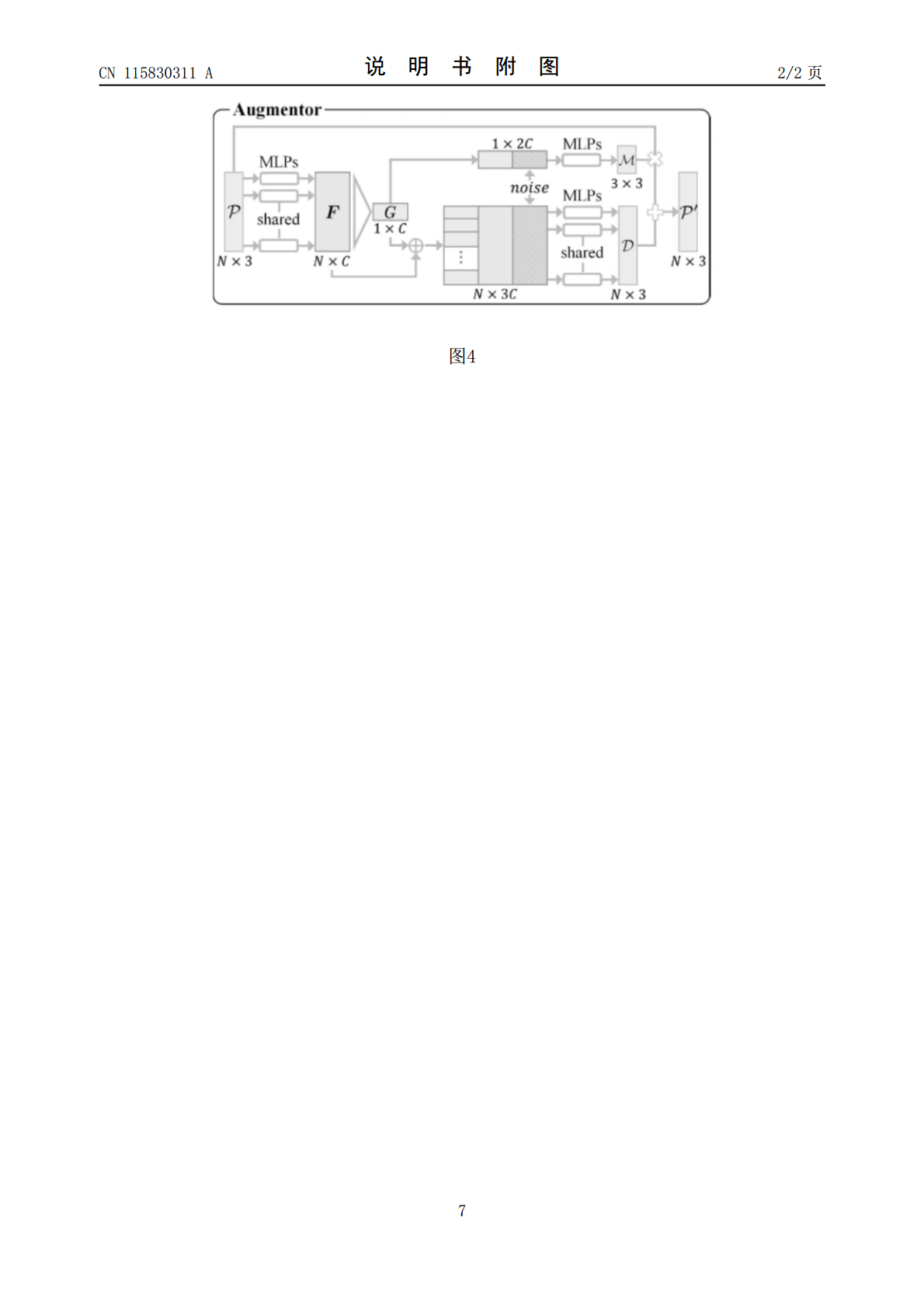
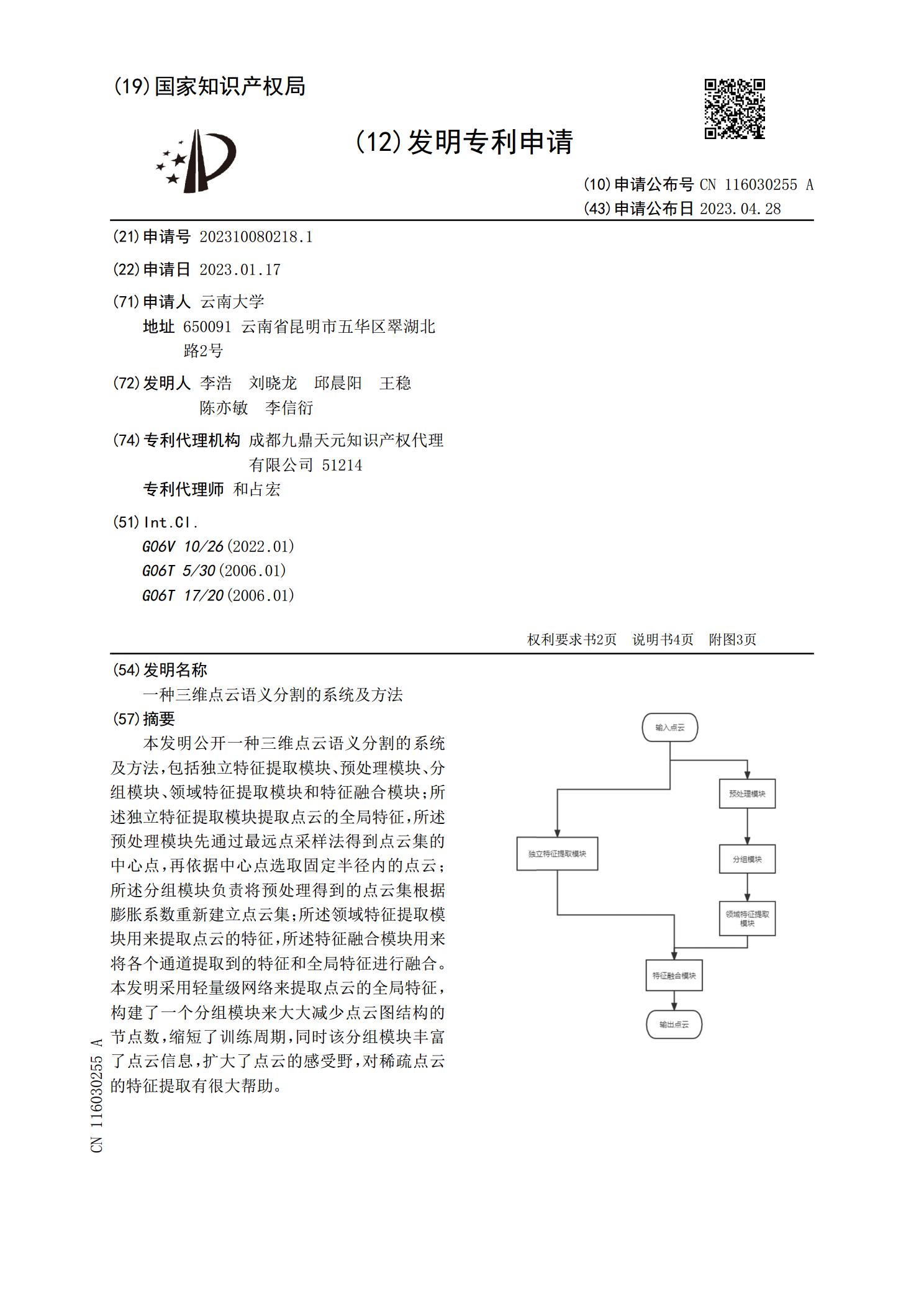
本发明公开了一种基于点云数据自动增强的三维点云语义分割方法。该发明可以进一步增强以PointNet++为代表的点云语义分割算法在不同应用场景下的泛化性能。以往点云语义分割算法通常存在两个问题:一是利用传统的数据增强方法;二是将数据增强与网络训练分为两个阶段。本发明提出的基于点云数据自动增强的三维点云语义分割方法,通过考虑样本的基本几何结构,为每个输入样本回归一个特定的增强函数,同时学习点云样本的形状变换和逐点位移,并联合优化增强函数和优化器,解决网络中输入样本多样性不足的问题,增强网络的泛化能力。

一种基于深度学习的三维点云语义分割方法.pdf
本发明公开了一种基于深度学习的三维点云语义分割方法,包括以下步骤:步骤1、根据先验信息对倾斜摄影软件获取的场景数字正射影像进行初步分类;步骤2、对点云数据进行预处理并进行点云样本的制作;步骤3、点云数据完成预处理与目标分割后,赋予相应的属性,并完成样本集的封装;步骤4、将样本集送入语义分割的神经网络中提取点云的特征,完成模型训练;步骤5、模型训练之后,进行测试,并对测试结果进行可视化,对可视化结果进一步分析,借此,本发明能够直接处理无序点云,并可以提取到点云不同尺度的局部特征,具有可以提高对精细场景的识别
一种三维点云语义分割的系统及方法.pdf
本发明公开一种三维点云语义分割的系统及方法,包括独立特征提取模块、预处理模块、分组模块、领域特征提取模块和特征融合模块;所述独立特征提取模块提取点云的全局特征,所述预处理模块先通过最远点采样法得到点云集的中心点,再依据中心点选取固定半径内的点云;所述分组模块负责将预处理得到的点云集根据膨胀系数重新建立点云集;所述领域特征提取模块用来提取点云的特征,所述特征融合模块用来将各个通道提取到的特征和全局特征进行融合。本发明采用轻量级网络来提取点云的全局特征,构建了一个分组模块来大大减少点云图结构的节点数,缩短了训

点云数据语义分割的理论与方法读书随笔.docx
《点云数据语义分割的理论与方法》读书随笔1.内容简述点云数据语义分割的理论与方法是一本关于点云数据处理和计算机视觉领域的著作。本书主要介绍了点云数据语义分割的基本理论、算法和技术,以及在实际应用中的一些典型案例。作者通过深入浅出的方式,让读者了解点云数据的特点、分类和处理方法,以及如何利用计算机视觉技术实现点云数据的语义分割。点云数据的特点:点云数据是由大量的三维空间中的点组成的,每个点包含了物体的位置、颜色、法向量等信息。点云数据具有高密度、高维度、稀疏性等特点,为计算机视觉领域提供了丰富的信息。点云数

基于多尺度特征融合的三维点云语义分割方法.pdf
本发明公开了一种基于多尺度特征融合的三维点云语义分割方法。针对现有方法中单一编码器存在的感受野受限、难以适应不同类别预测的问题,本发明在网络编码器部分引入多支具有不同感受野的子编码器用于编码不同尺度的特征,为了在保证子编码器感受野大小的同时减少计算量和显存占用,本发明使用空洞卷积提取点云特征。相比于已有的基于深度学习框架的三维点云语义分割方法,本发明方法更好的保留了属于点云集合的不同尺度的高维特征,因此可以适应不同尺度的地物的预测,实现比已有方法更高的语义分割精度。