
路径跟踪控制方法、装置、系统和车辆.pdf

猫巷****雪凝

1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
路径跟踪控制方法、装置、系统和车辆.pdf
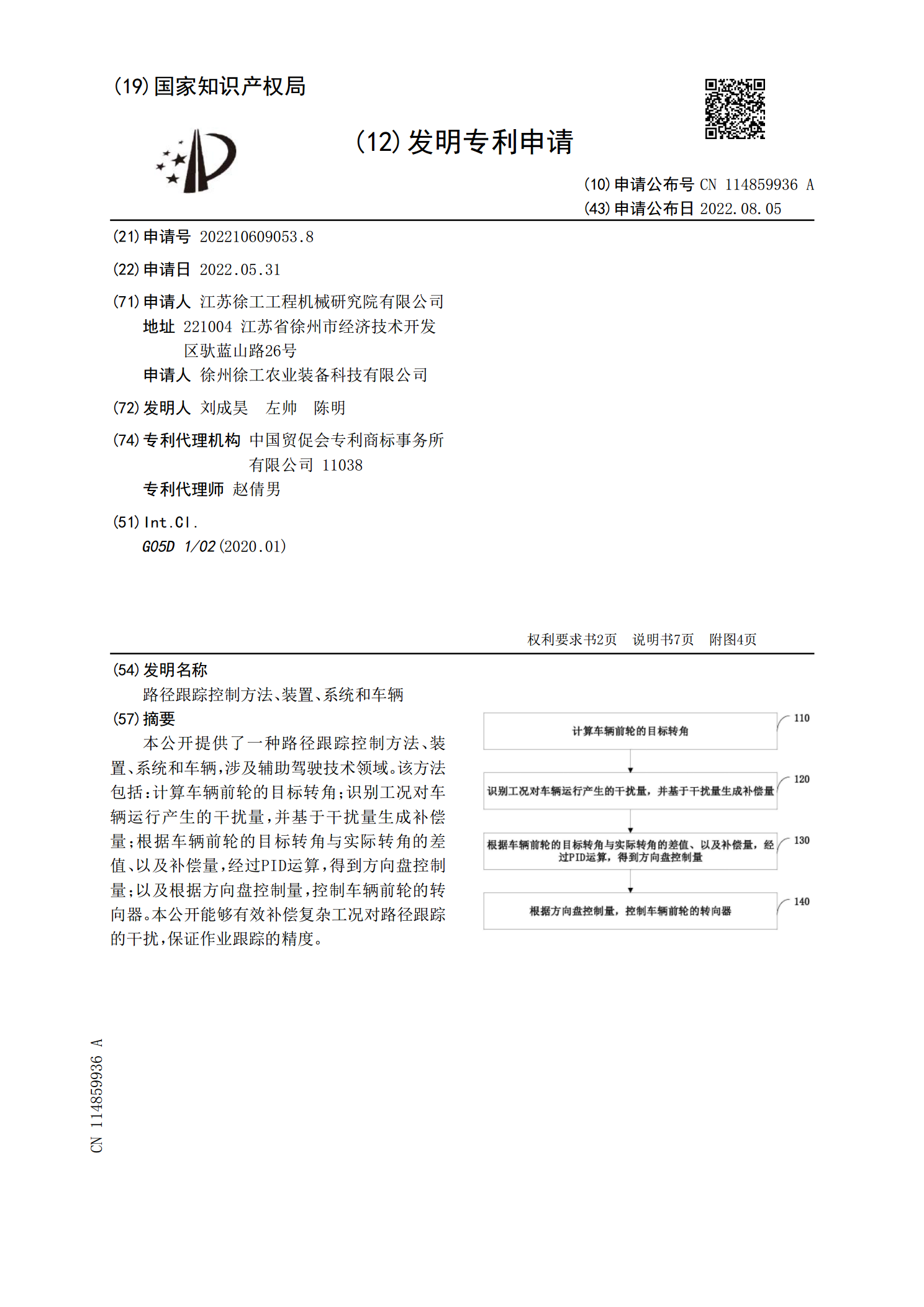
本公开提供了一种路径跟踪控制方法、装置、系统和车辆,涉及辅助驾驶技术领域。该方法包括:计算车辆前轮的目标转角;识别工况对车辆运行产生的干扰量,并基于干扰量生成补偿量;根据车辆前轮的目标转角与实际转角的差值、以及补偿量,经过PID运算,得到方向盘控制量;以及根据方向盘控制量,控制车辆前轮的转向器。本公开能够有效补偿复杂工况对路径跟踪的干扰,保证作业跟踪的精度。
作业车辆路径跟踪控制方法、装置、电子装置和存储介质.pdf
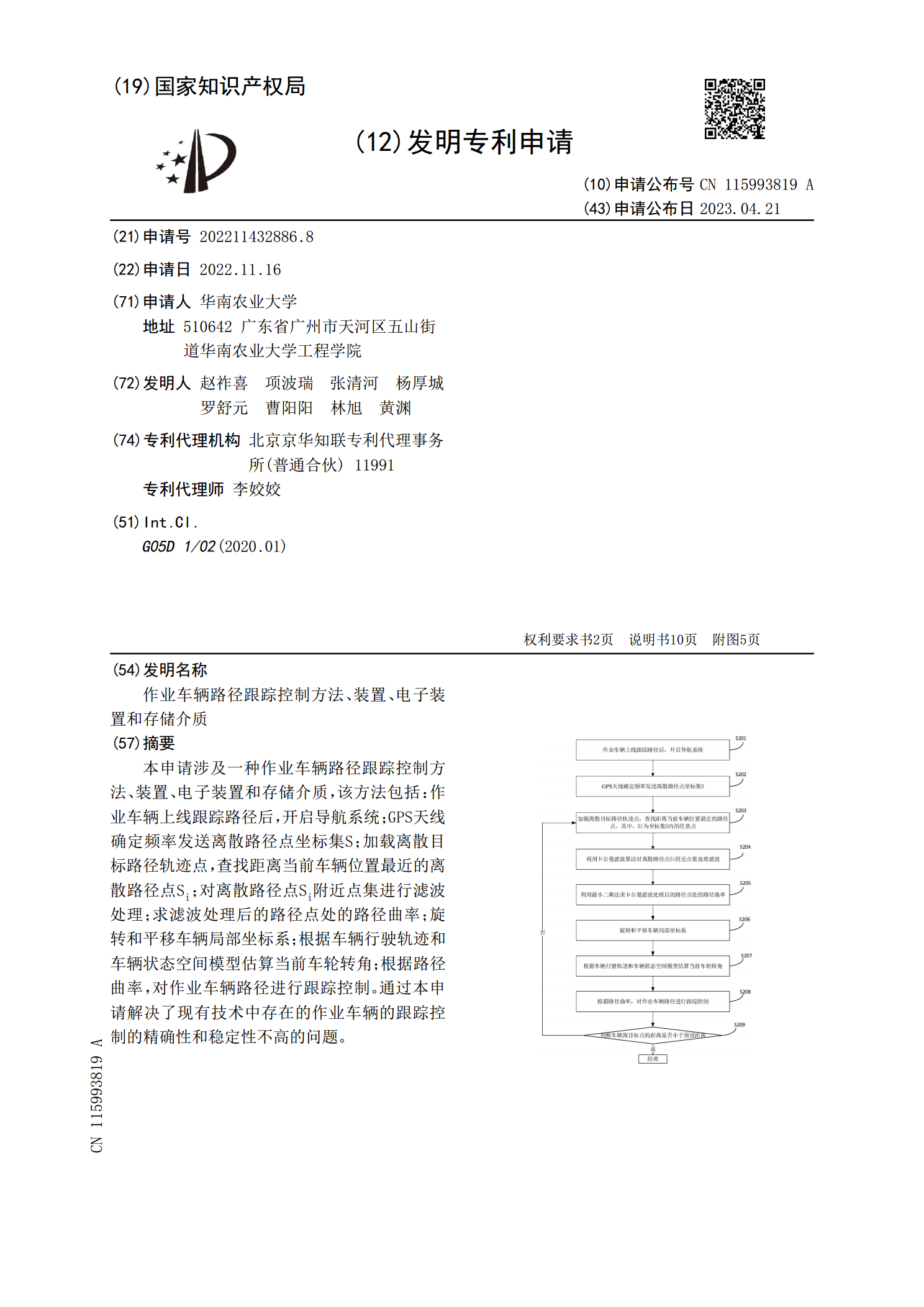
本申请涉及一种作业车辆路径跟踪控制方法、装置、电子装置和存储介质,该方法包括:作业车辆上线跟踪路径后,开启导航系统;GPS天线确定频率发送离散路径点坐标集S;加载离散目标路径轨迹点,查找距离当前车辆位置最近的离散路径点S
路径跟踪方法、装置、车辆及存储介质.pdf
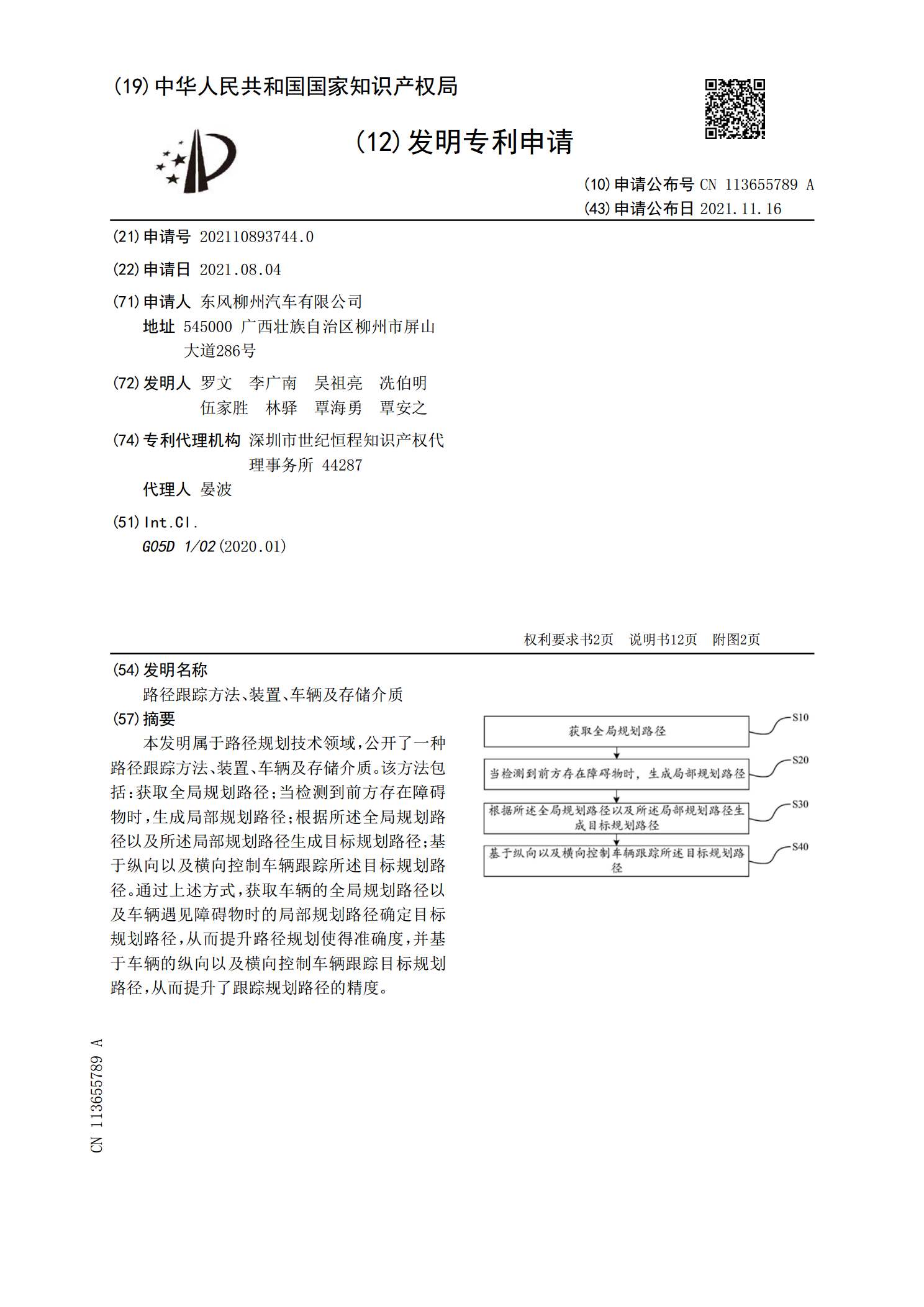
本发明属于路径规划技术领域,公开了一种路径跟踪方法、装置、车辆及存储介质。该方法包括:获取全局规划路径;当检测到前方存在障碍物时,生成局部规划路径;根据所述全局规划路径以及所述局部规划路径生成目标规划路径;基于纵向以及横向控制车辆跟踪所述目标规划路径。通过上述方式,获取车辆的全局规划路径以及车辆遇见障碍物时的局部规划路径确定目标规划路径,从而提升路径规划使得准确度,并基于车辆的纵向以及横向控制车辆跟踪目标规划路径,从而提升了跟踪规划路径的精度。
车辆控制方法、系统和装置.pdf
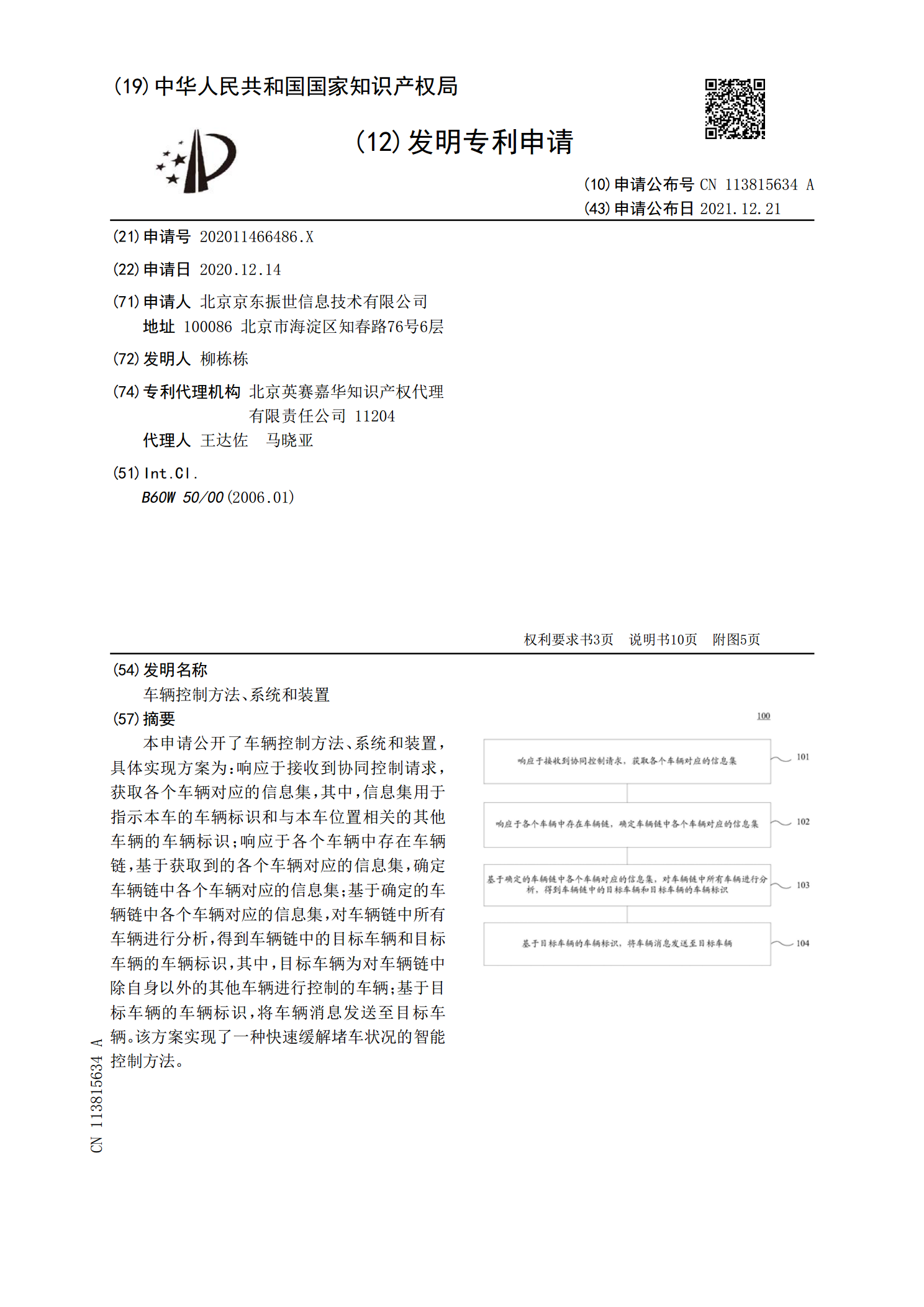
本申请公开了车辆控制方法、系统和装置,具体实现方案为:响应于接收到协同控制请求,获取各个车辆对应的信息集,其中,信息集用于指示本车的车辆标识和与本车位置相关的其他车辆的车辆标识;响应于各个车辆中存在车辆链,基于获取到的各个车辆对应的信息集,确定车辆链中各个车辆对应的信息集;基于确定的车辆链中各个车辆对应的信息集,对车辆链中所有车辆进行分析,得到车辆链中的目标车辆和目标车辆的车辆标识,其中,目标车辆为对车辆链中除自身以外的其他车辆进行控制的车辆;基于目标车辆的车辆标识,将车辆消息发送至目标车辆。该方案实现了

车辆控制装置、车辆控制系统和车辆控制方法.pdf
本发明的车辆控制装置包括:加法单元,将根据由BLSD请求液压计算处理单元求得的BLSD请求液压对低μ路面侧的车轮给予的制动扭矩造成的损耗的驱动扭矩(损耗补偿量驱动扭矩),相加了由驾驶员请求扭矩计算处理单元求得的驾驶员请求扭矩的补偿后驾驶员请求扭矩输出到电机。