
一种球形果实采摘回收装置及方法.pdf

是笛****加盟

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种球形果实采摘回收装置及方法.pdf
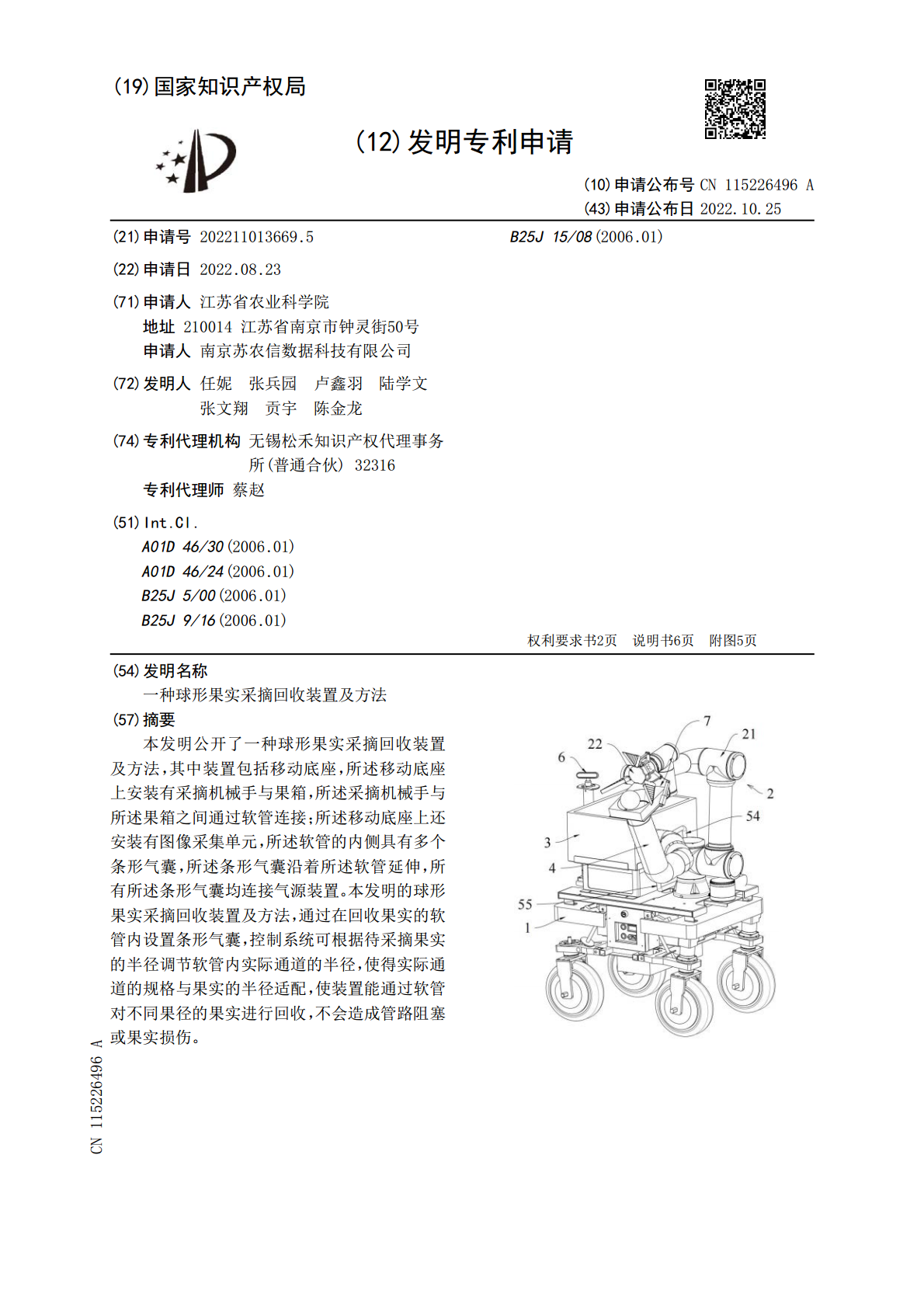
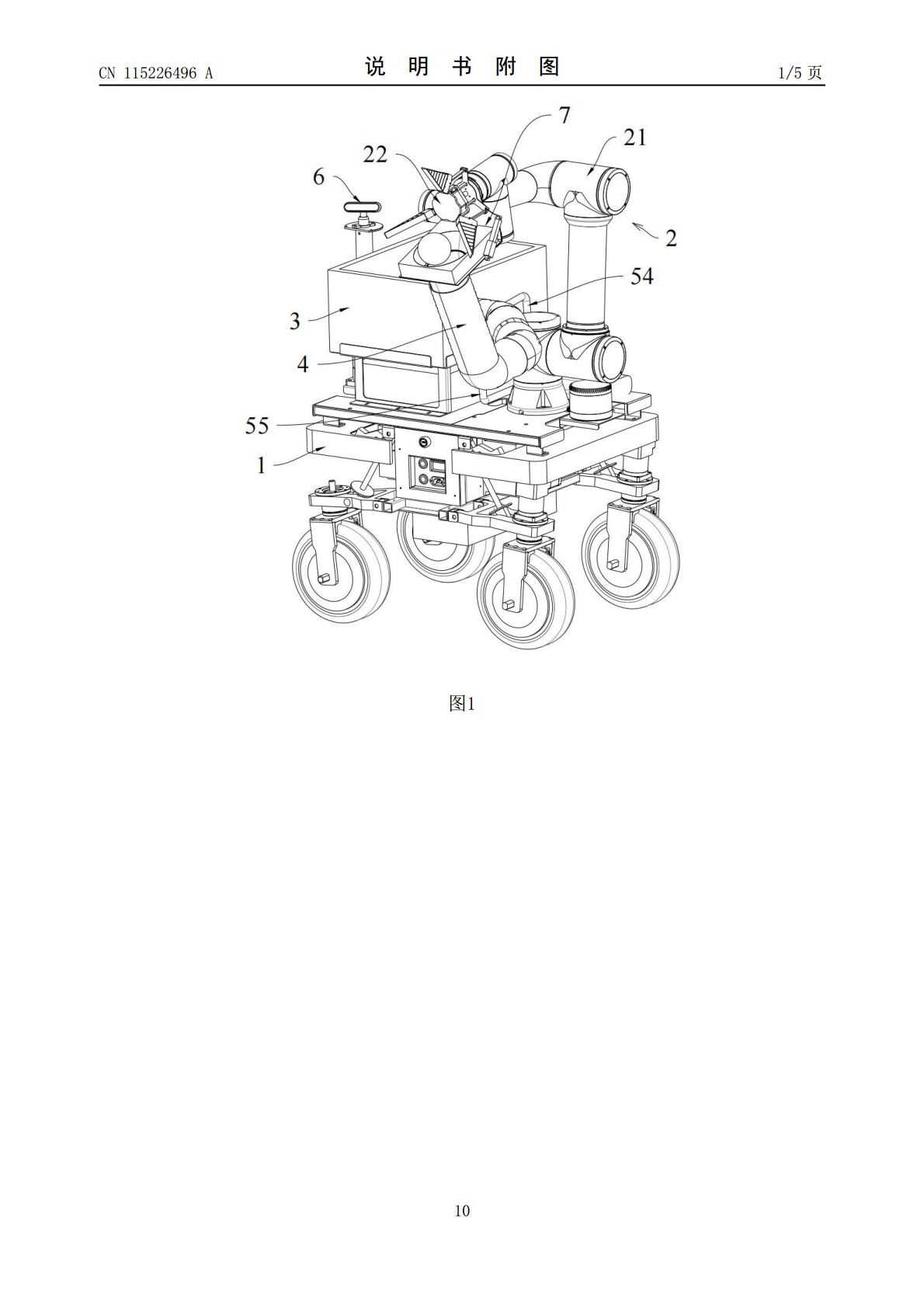
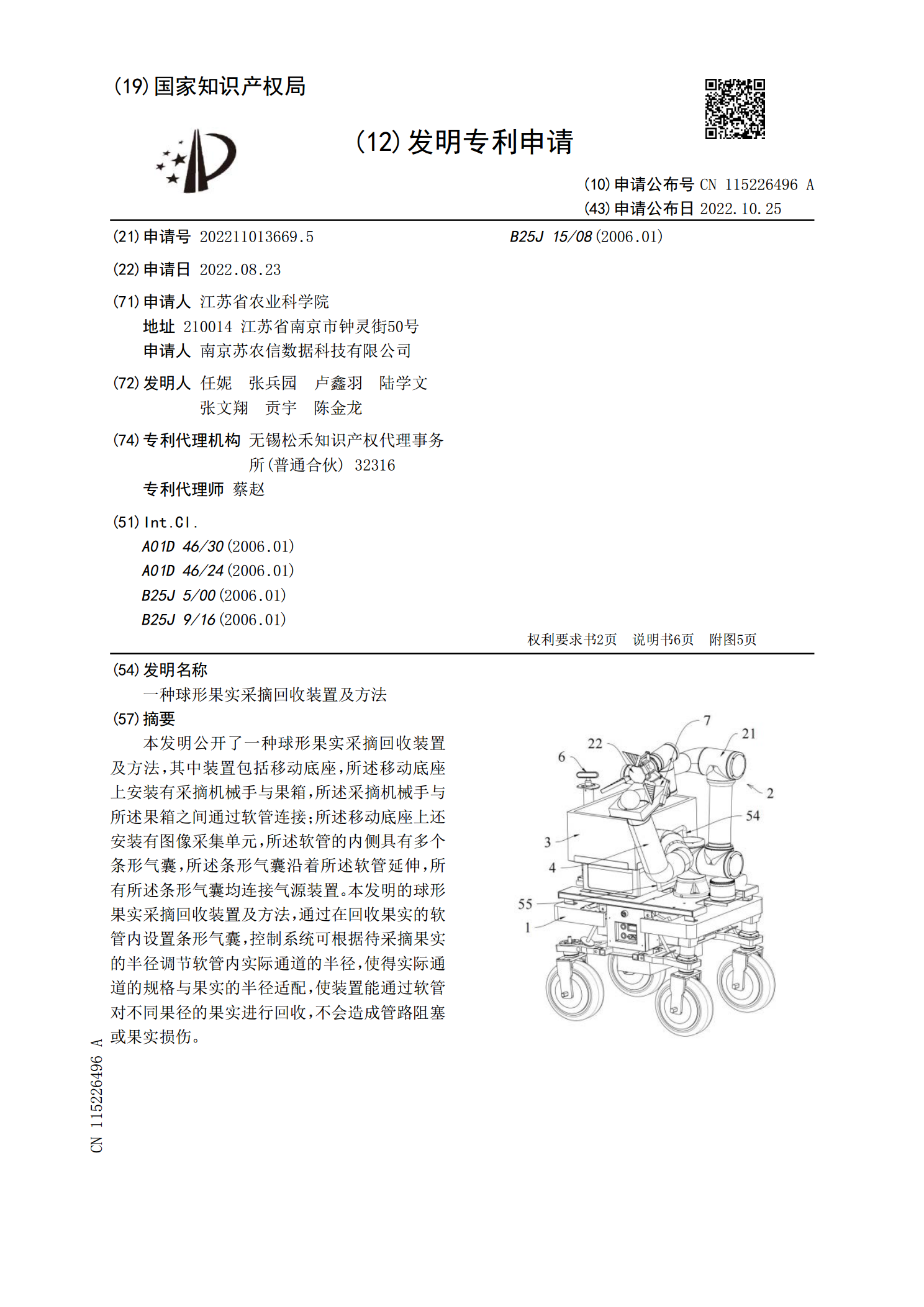
本发明公开了一种球形果实采摘回收装置及方法,其中装置包括移动底座,所述移动底座上安装有采摘机械手与果箱,所述采摘机械手与所述果箱之间通过软管连接;所述移动底座上还安装有图像采集单元,所述软管的内侧具有多个条形气囊,所述条形气囊沿着所述软管延伸,所有所述条形气囊均连接气源装置。本发明的球形果实采摘回收装置及方法,通过在回收果实的软管内设置条形气囊,控制系统可根据待采摘果实的半径调节软管内实际通道的半径,使得实际通道的规格与果实的半径适配,使装置能通过软管对不同果径的果实进行回收,不会造成管路阻塞或果实损伤。
一种果实抓取装置、采摘装置和采摘方法.pdf
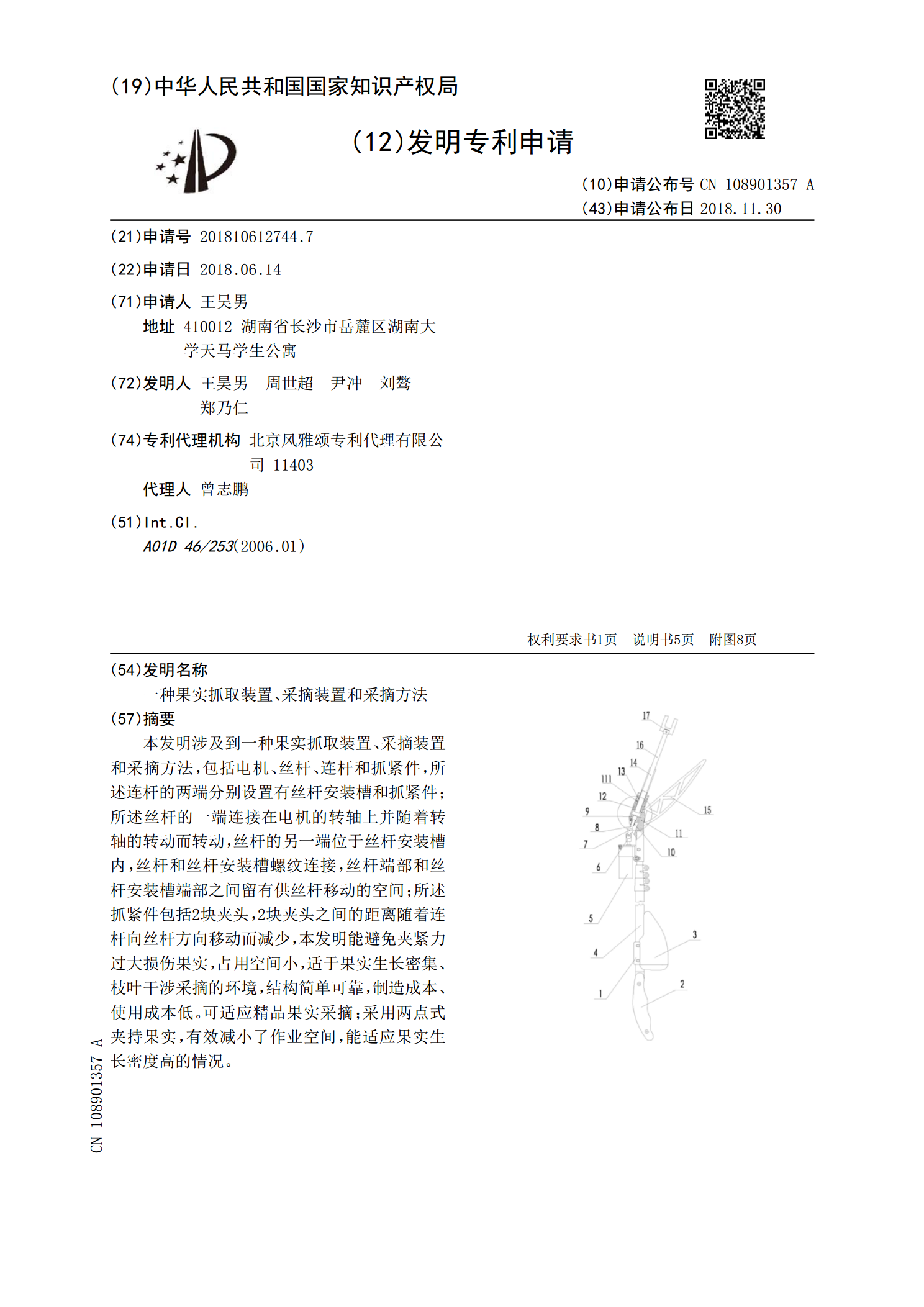
本发明涉及到一种果实抓取装置、采摘装置和采摘方法,包括电机、丝杆、连杆和抓紧件,所述连杆的两端分别设置有丝杆安装槽和抓紧件;所述丝杆的一端连接在电机的转轴上并随着转轴的转动而转动,丝杆的另一端位于丝杆安装槽内,丝杆和丝杆安装槽螺纹连接,丝杆端部和丝杆安装槽端部之间留有供丝杆移动的空间;所述抓紧件包括2块夹头,2块夹头之间的距离随着连杆向丝杆方向移动而减少,本发明能避免夹紧力过大损伤果实,占用空间小,适于果实生长密集、枝叶干涉采摘的环境,结构简单可靠,制造成本、使用成本低。可适应精品果实采摘;采用两点式夹持
一种果实采摘装置.pdf
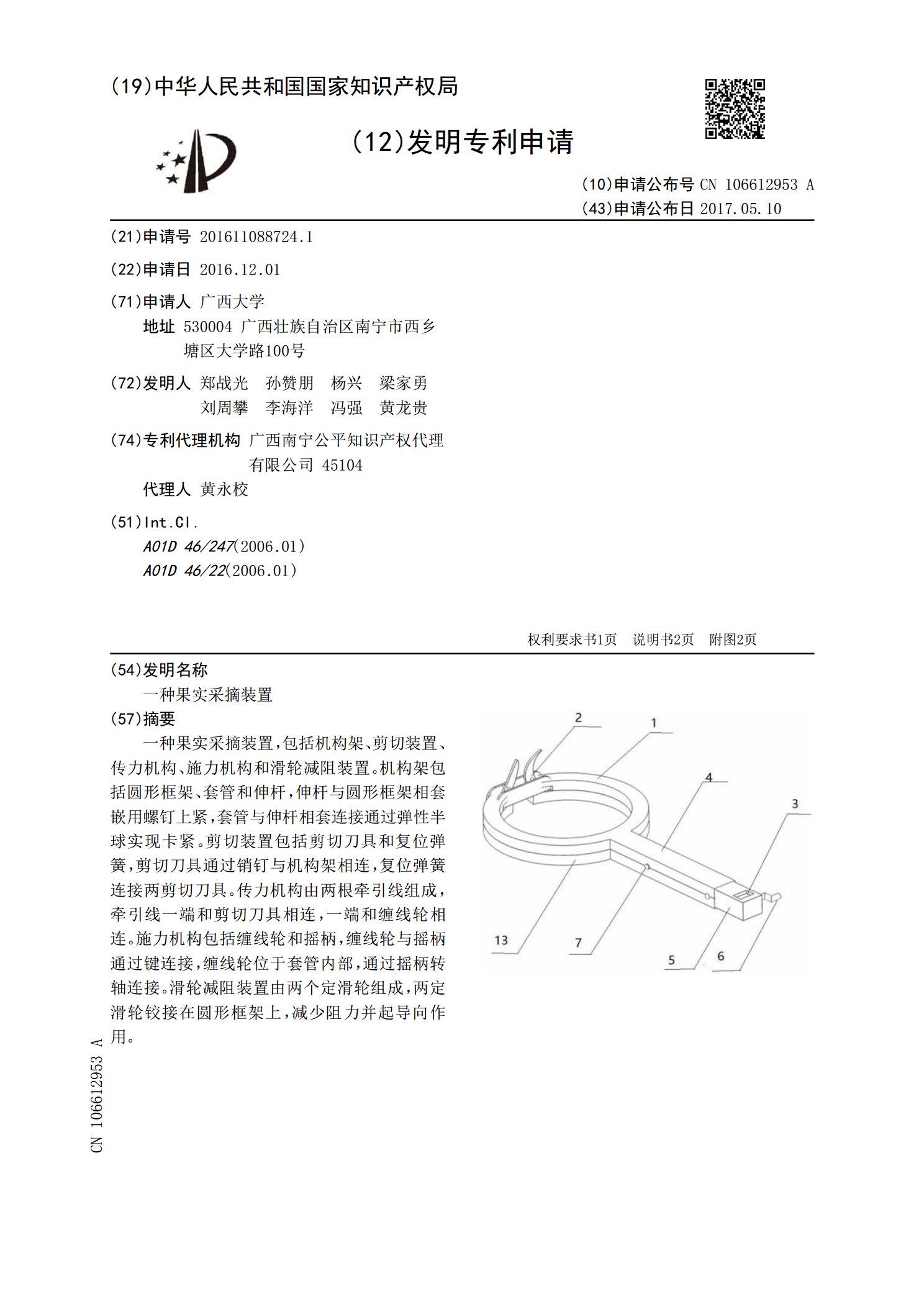
一种果实采摘装置,包括机构架、剪切装置、传力机构、施力机构和滑轮减阻装置。机构架包括圆形框架、套管和伸杆,伸杆与圆形框架相套嵌用螺钉上紧,套管与伸杆相套连接通过弹性半球实现卡紧。剪切装置包括剪切刀具和复位弹簧,剪切刀具通过销钉与机构架相连,复位弹簧连接两剪切刀具。传力机构由两根牵引线组成,牵引线一端和剪切刀具相连,一端和缠线轮相连。施力机构包括缠线轮和摇柄,缠线轮与摇柄通过键连接,缠线轮位于套管内部,通过摇柄转轴连接。滑轮减阻装置由两个定滑轮组成,两定滑轮铰接在圆形框架上,减少阻力并起导向作用。

一种果实采摘装置.pdf
本发明公开了一种果实采摘装置,属于果实采摘领域,包括采摘头、集料箱和驱动所述采摘头的驱动电机,所述采摘头包括采摘辊和毛刷,所述采摘辊的两端连接在所述集料箱上,所述毛刷包裹在所述采摘辊的外表面,所述驱动电机的输出轴与所述滚轴连接。在集料箱上设置卸料口,集料箱内部的空腔内设置有用以缓冲和保护果实的缓冲装置,缓冲装置包括缓冲板、第一弹性件和第二弹性件。本发明提供的果实采摘装置在辊上包裹刷毛,其每一根毛体的作用力无法损伤果实果体,但成千上万根毛体作用力合要大于人工力,会大于采离果体的力,而这种力又不会伤害到果实,
一种新型高空果实采摘装置.pdf
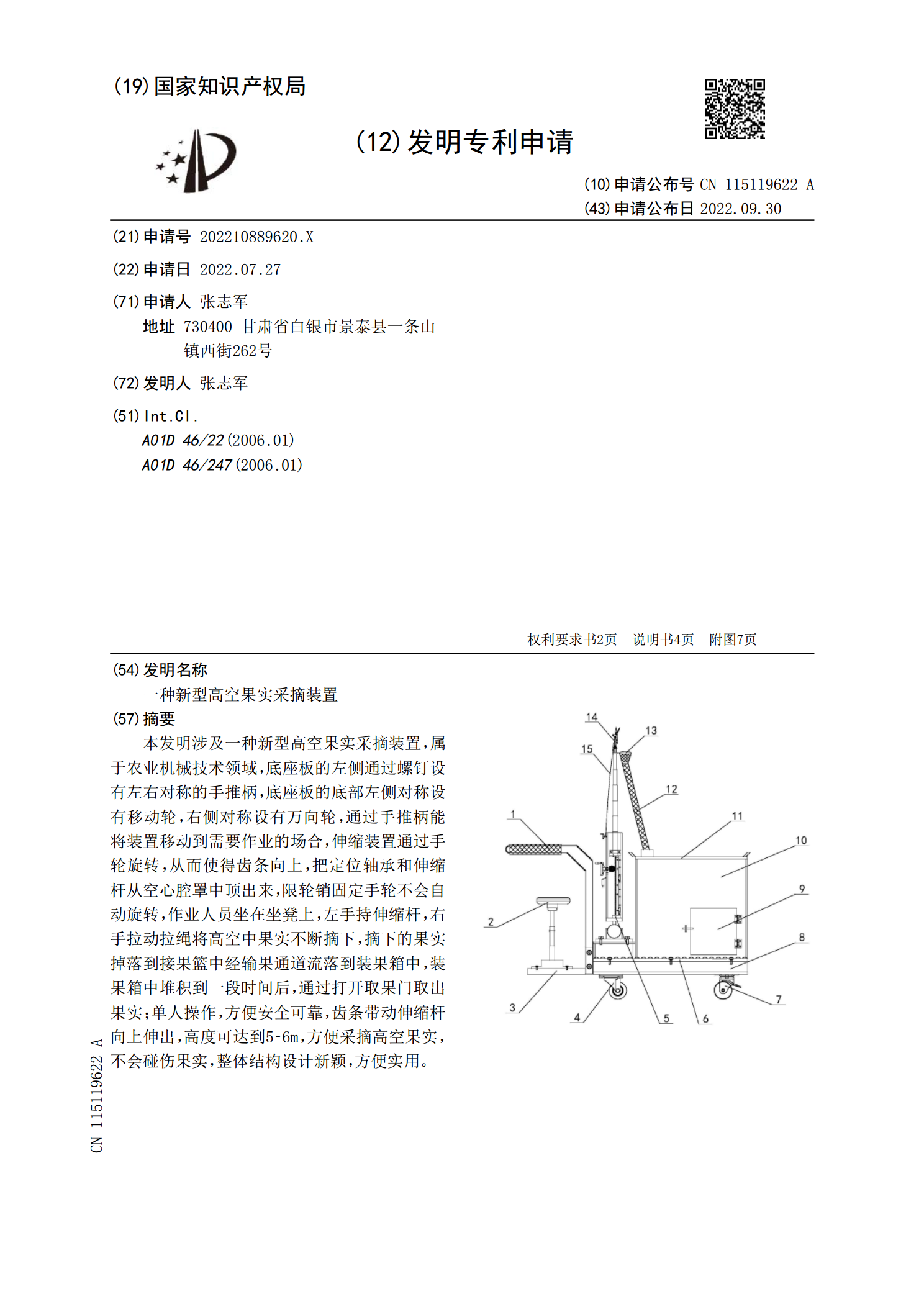
本发明涉及一种新型高空果实采摘装置,属于农业机械技术领域,底座板的左侧通过螺钉设有左右对称的手推柄,底座板的底部左侧对称设有移动轮,右侧对称设有万向轮,通过手推柄能将装置移动到需要作业的场合,伸缩装置通过手轮旋转,从而使得齿条向上,把定位轴承和伸缩杆从空心腔罩中顶出来,限轮销固定手轮不会自动旋转,作业人员坐在坐凳上,左手持伸缩杆,右手拉动拉绳将高空中果实不断摘下,摘下的果实掉落到接果篮中经输果通道流落到装果箱中,装果箱中堆积到一段时间后,通过打开取果门取出果实;单人操作,方便安全可靠,齿条带动伸缩杆向上伸