
自适应农机底盘及控制方法.pdf

努力****凌芹

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自适应农机底盘及控制方法.pdf
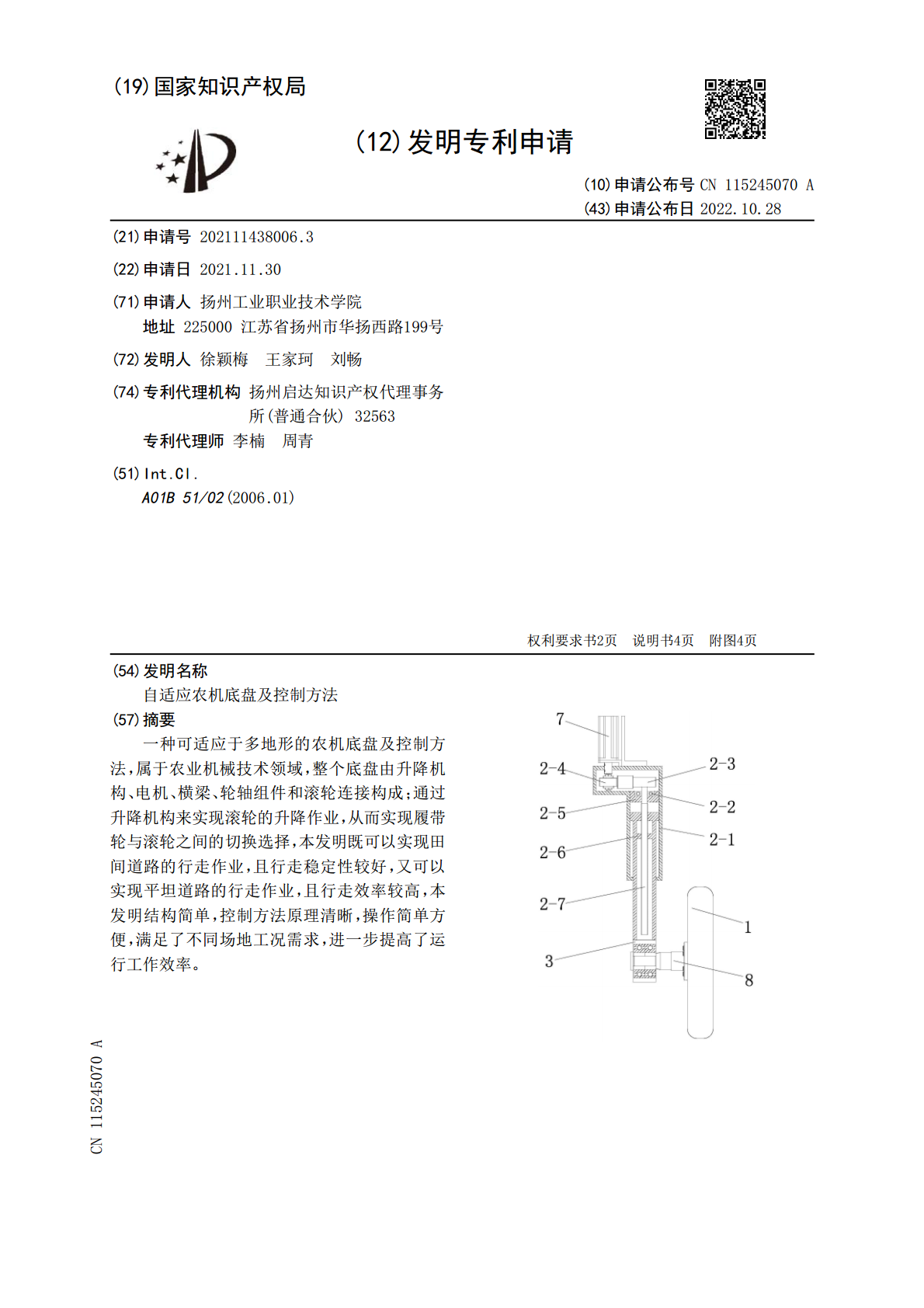
一种可适应于多地形的农机底盘及控制方法,属于农业机械技术领域,整个底盘由升降机构、电机、横梁、轮轴组件和滚轮连接构成;通过升降机构来实现滚轮的升降作业,从而实现履带轮与滚轮之间的切换选择,本发明既可以实现田间道路的行走作业,且行走稳定性较好,又可以实现平坦道路的行走作业,且行走效率较高,本发明结构简单,控制方法原理清晰,操作简单方便,满足了不同场地工况需求,进一步提高了运行工作效率。
一种自适应机器人新型底盘及自适应平衡调节方法.pdf
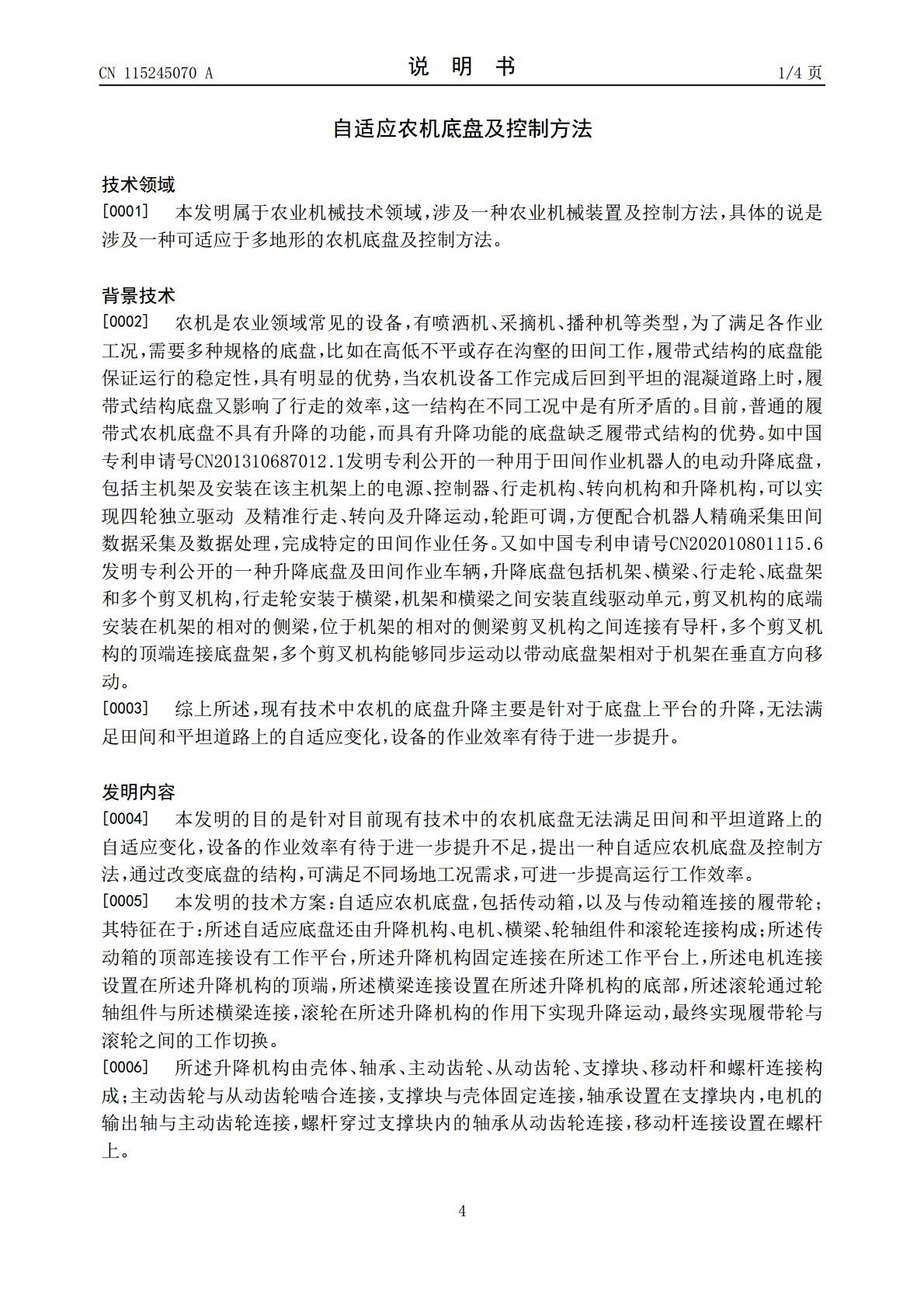
本发明公开了一种自适应机器人新型底盘及自适应平衡调节方法,前万向轮组件、驱动轮组件和后万向轮组件依次在底盘下方为前中后排列位置,驱动轮组件设在横向调整框架组件下方,横向调整框架组件设在纵向调整框架组件下方处,底盘底板组件设在纵向调整框架组件上方;纵向调整框架组件设纵向推杆组件和纵向摇杆组件,横向调整框架组件设横向推杆组件和横向摇杆组件,前万向轮组件设转动驱动轮轴,后万向轮组件设转动固定杆;陀螺仪传感器、纵向推杆组件和横向推杆组件均与底盘电控制组件相电连接。可更稳定地进行自适应越障、上下坡和走单边斜坡环境,
基于动态自适应LQR的智能农机自主作业控制方法及系统.pdf
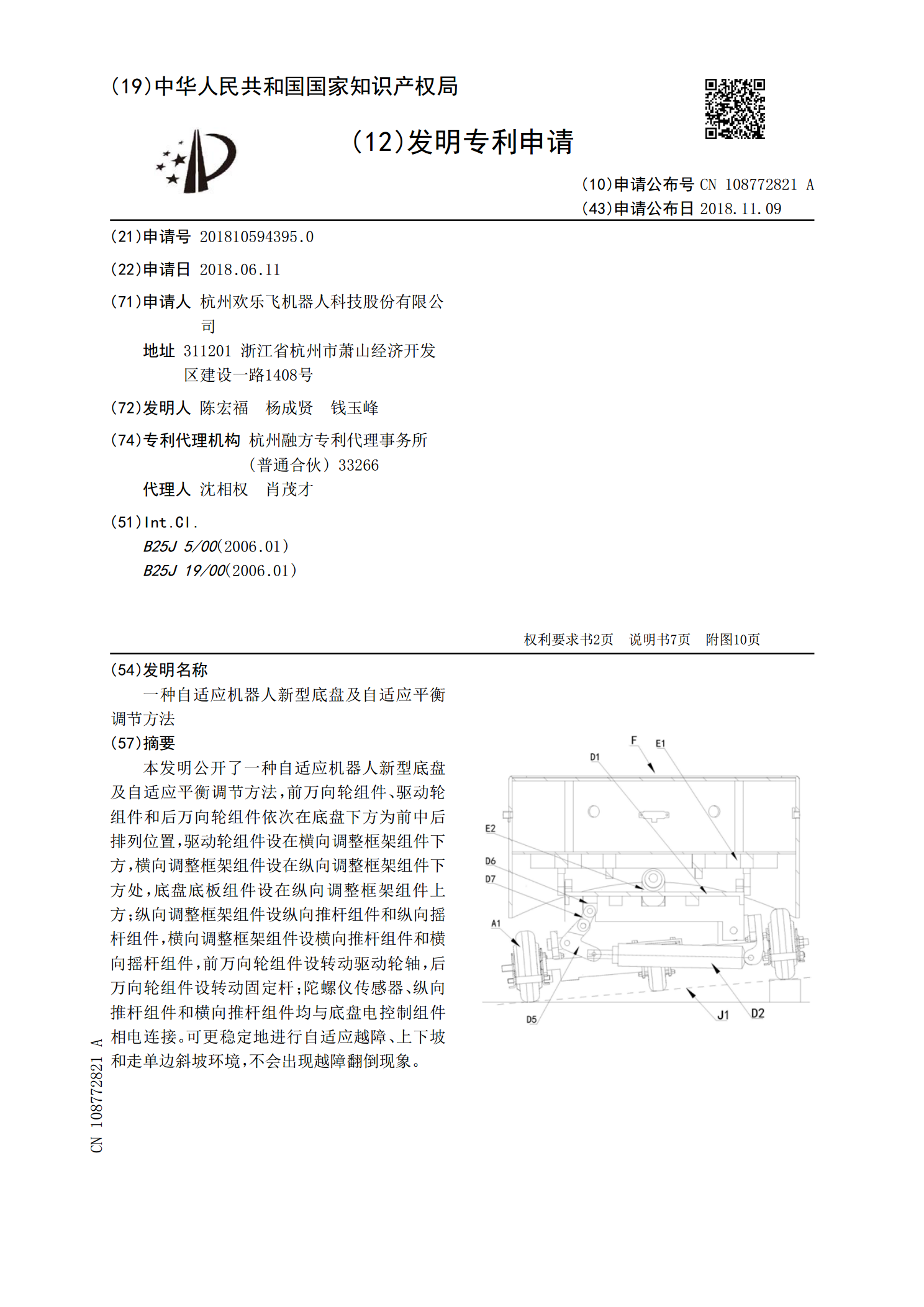
本发明提出一种基于动态自适应LQR的智能农机自主作业控制方法,包括:建立智能农机的运动模型,并基于LQR算法生成该运动模型的目标函数,建立关于该目标函数的状态权重矩阵和控制权重矩阵的动态调整模型;在该智能农机的工作过程中,获取该智能农机于当前时刻的位姿态信息,根据该位姿态信息以该动态调整模型调整该状态权重矩阵和该控制权重矩阵;以调整后的目标函数解算出当前时刻的航向偏差控制量,并以该航向偏差控制量对该智能农机进行运行控制。本发明还提出一种基于动态自适应LQR的智能农机自主作业控制系统,以及一种用于智能农机自

底盘控制臂和用于制造底盘控制臂的方法.pdf
本发明涉及一种底盘控制臂(1),包括材料相同地一体构造的基体(2),该基体由挤出的空心型材制成,该空心型材具有多个空腔(3‑5),基体(2)具有至少一个贯穿基体(2)的轴承容纳部(6、11),第一轴承容纳部(6)由空腔之一(3)形成,第一轴承容纳部(6)具有第一轴承轴线(11),其方向相应于形成第一轴承容纳部(6)的空心型材的挤出方向(E)。本发明还涉及一种用于制造底盘控制臂(1)的方法。
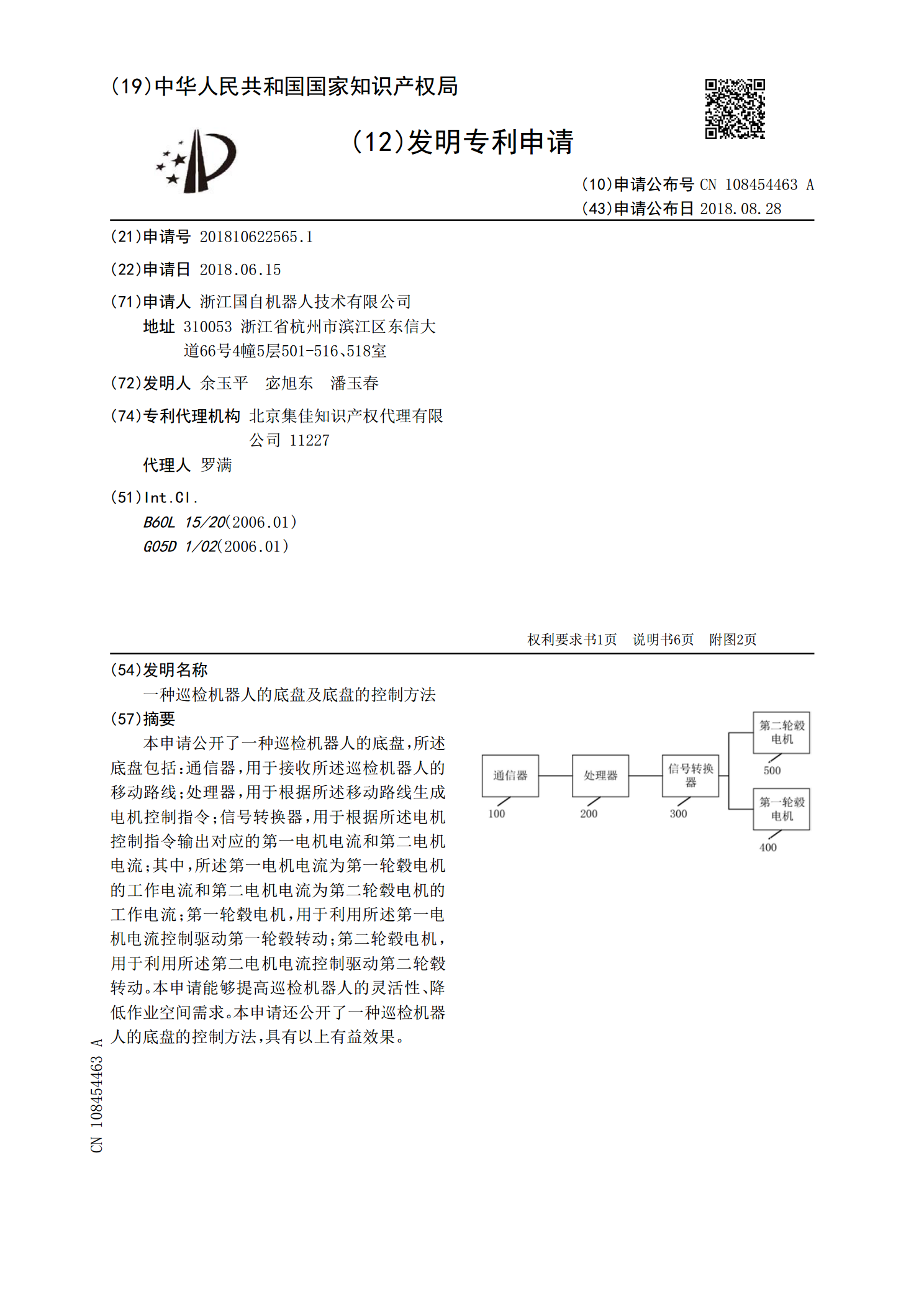
一种巡检机器人的底盘及底盘的控制方法.pdf
本申请公开了一种巡检机器人的底盘,所述底盘包括:通信器,用于接收所述巡检机器人的移动路线;处理器,用于根据所述移动路线生成电机控制指令;信号转换器,用于根据所述电机控制指令输出对应的第一电机电流和第二电机电流;其中,所述第一电机电流为第一轮毂电机的工作电流和第二电机电流为第二轮毂电机的工作电流;第一轮毂电机,用于利用所述第一电机电流控制驱动第一轮毂转动;第二轮毂电机,用于利用所述第二电机电流控制驱动第二轮毂转动。本申请能够提高巡检机器人的灵活性、降低作业空间需求。本申请还公开了一种巡检机器人的底盘的控制方