
一种自适应机器人新型底盘及自适应平衡调节方法.pdf

代瑶****zy


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自适应机器人新型底盘及自适应平衡调节方法.pdf
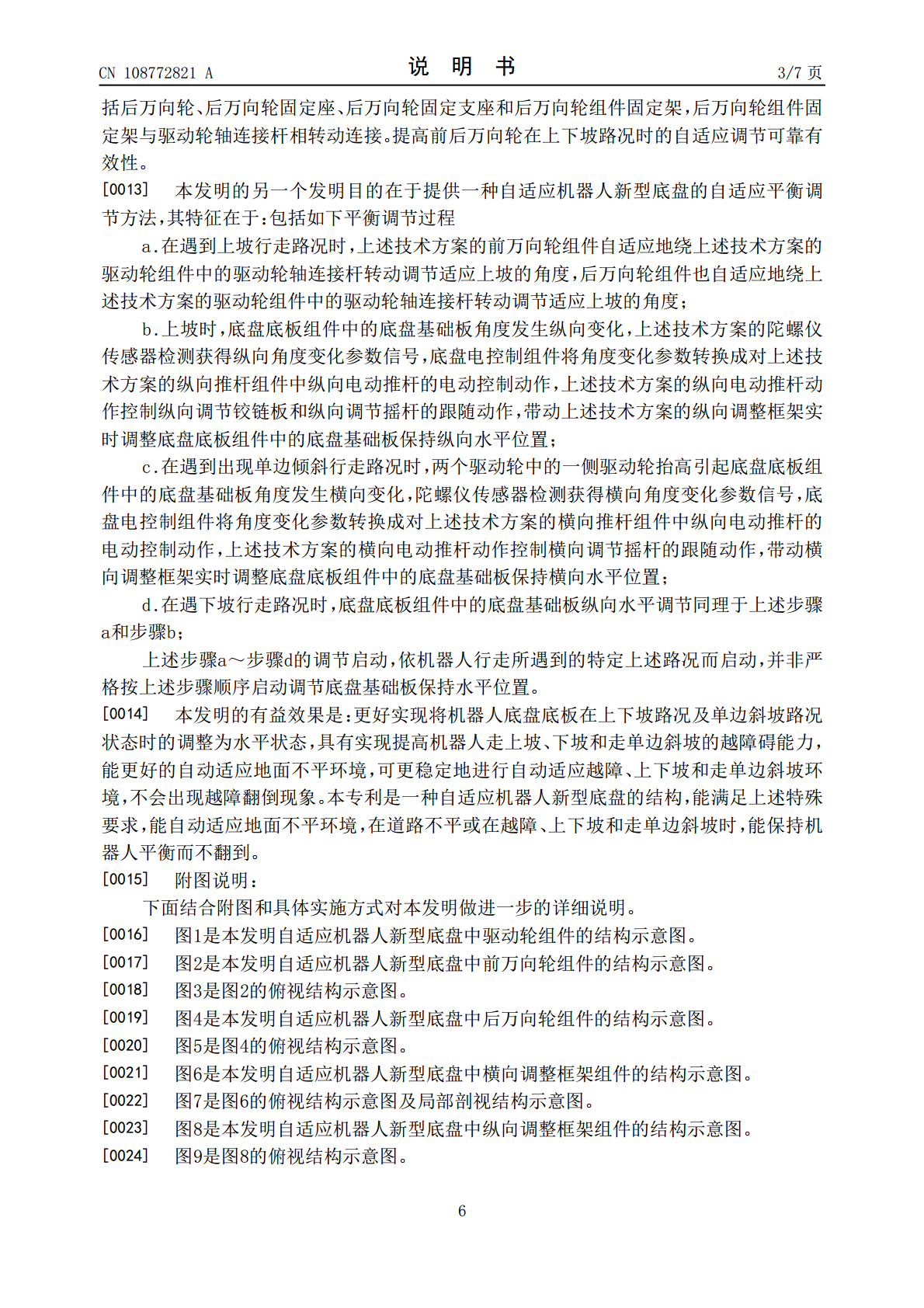
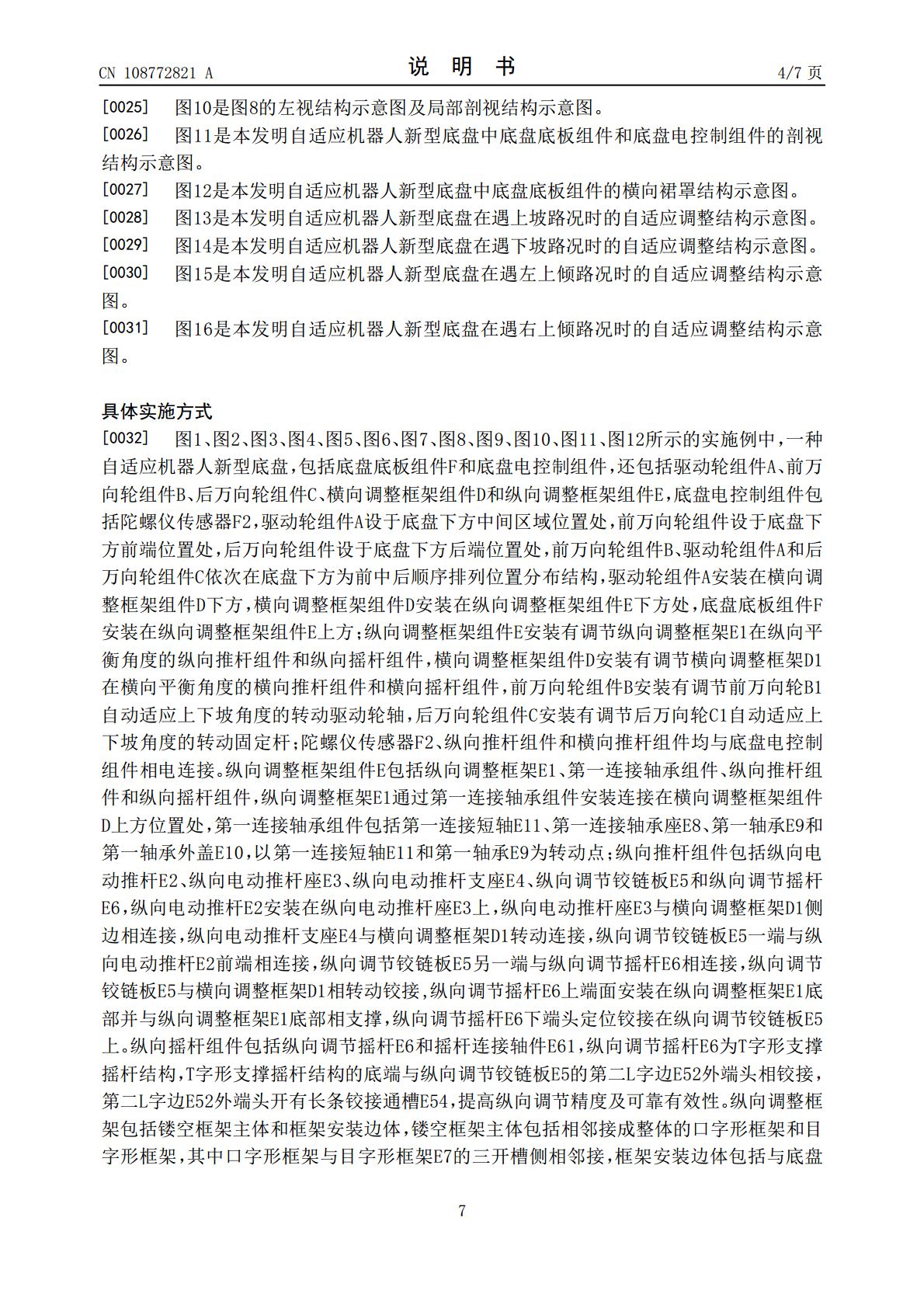
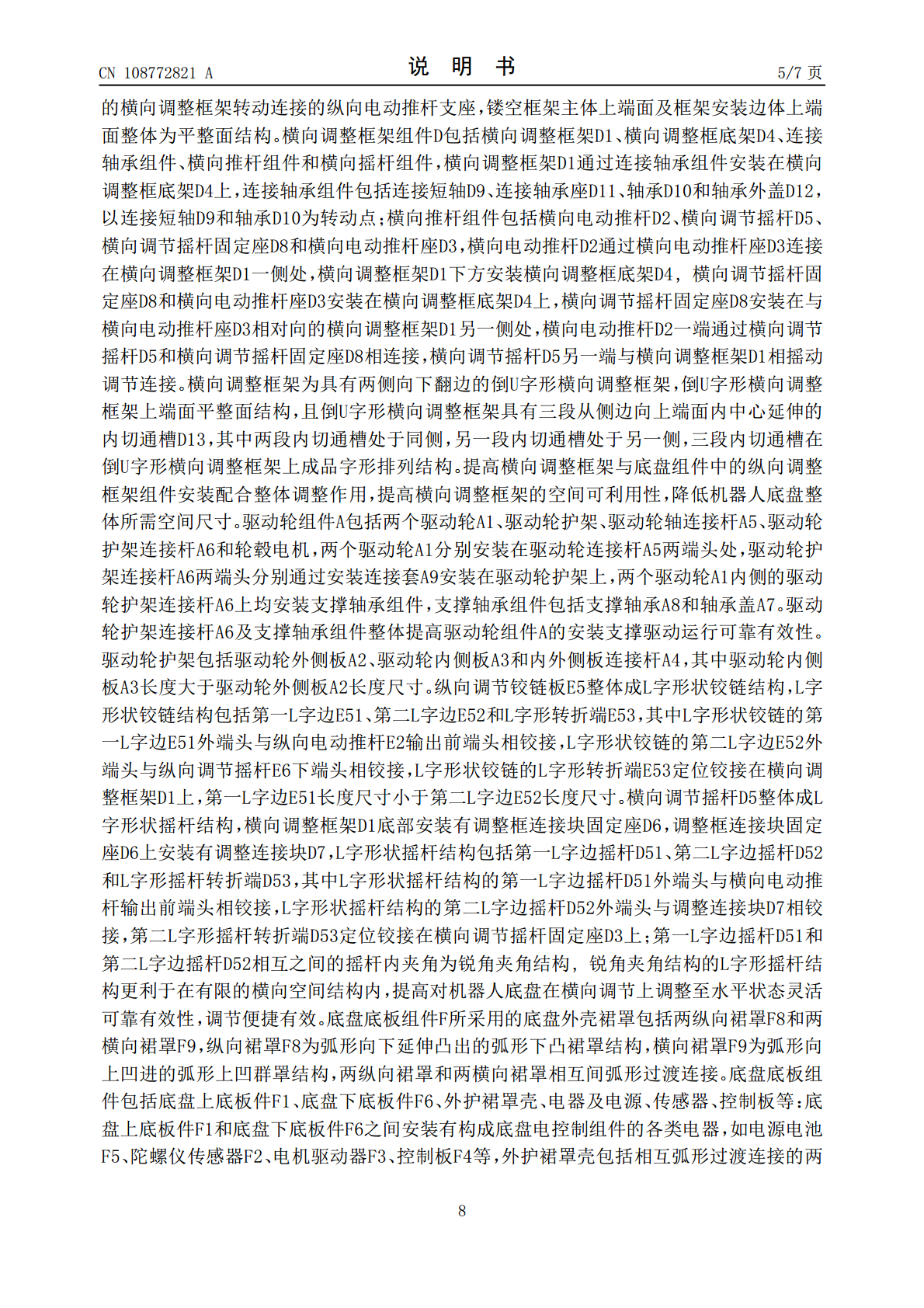
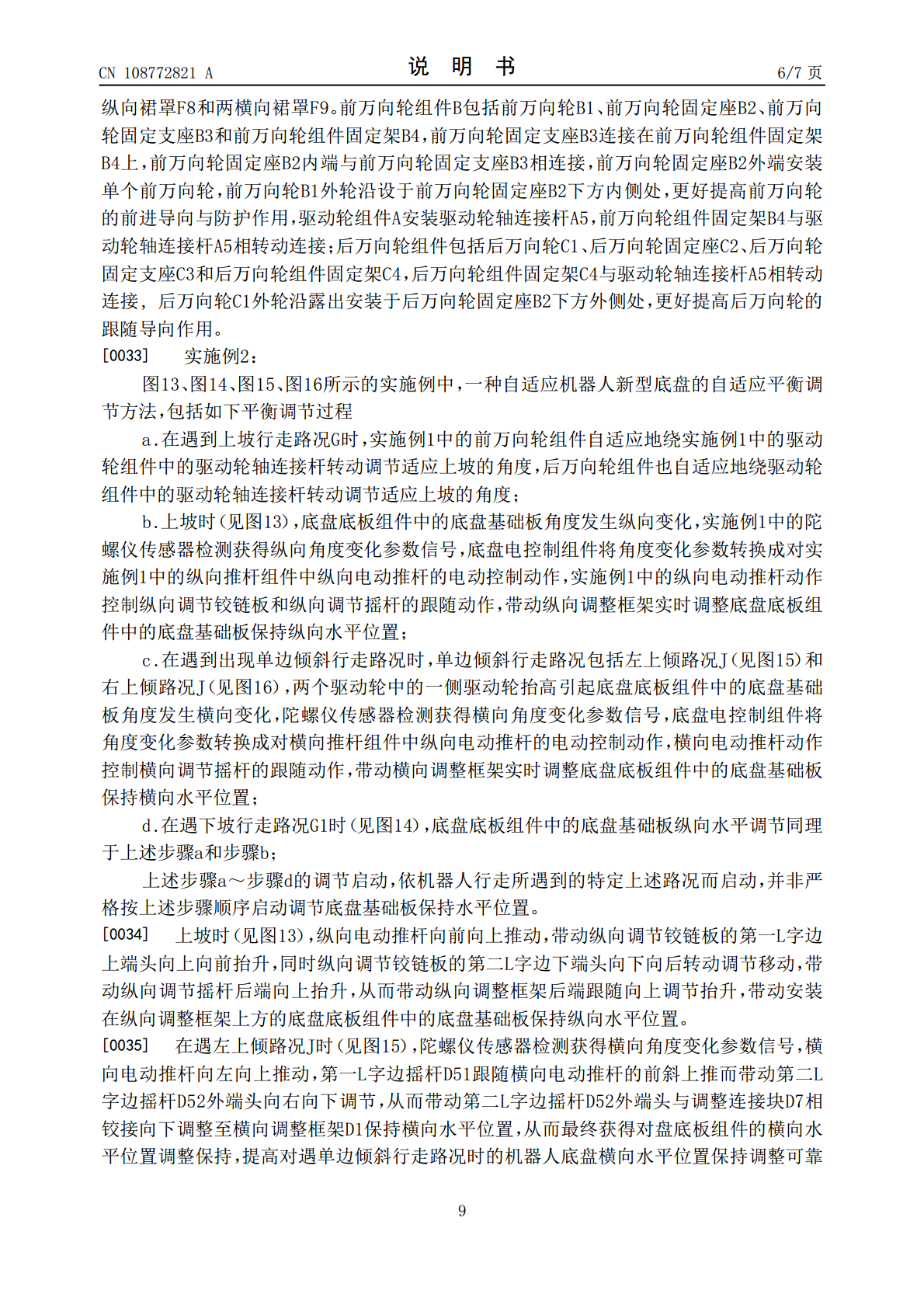
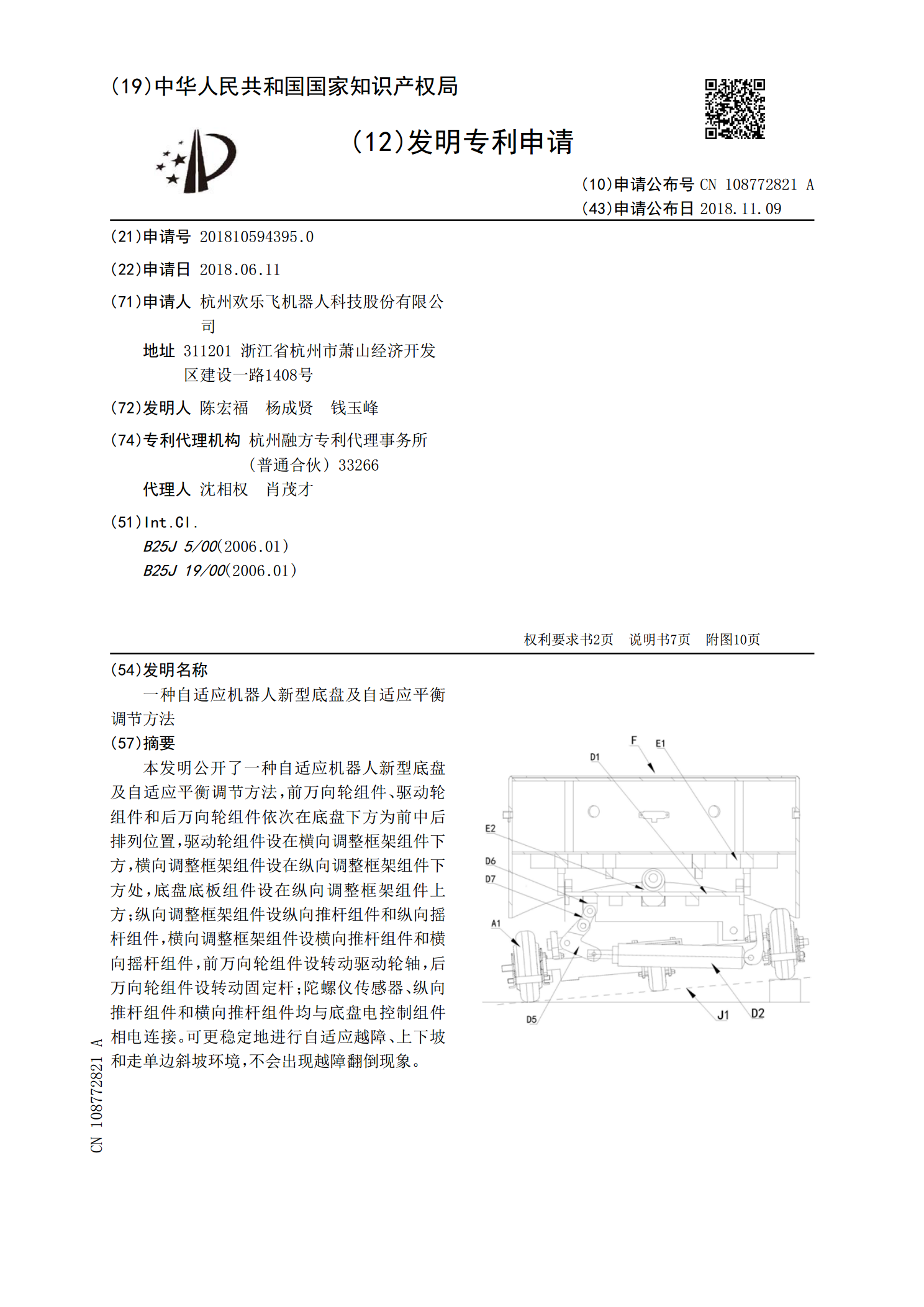
本发明公开了一种自适应机器人新型底盘及自适应平衡调节方法,前万向轮组件、驱动轮组件和后万向轮组件依次在底盘下方为前中后排列位置,驱动轮组件设在横向调整框架组件下方,横向调整框架组件设在纵向调整框架组件下方处,底盘底板组件设在纵向调整框架组件上方;纵向调整框架组件设纵向推杆组件和纵向摇杆组件,横向调整框架组件设横向推杆组件和横向摇杆组件,前万向轮组件设转动驱动轮轴,后万向轮组件设转动固定杆;陀螺仪传感器、纵向推杆组件和横向推杆组件均与底盘电控制组件相电连接。可更稳定地进行自适应越障、上下坡和走单边斜坡环境,
一种自适应平衡底座及自适应平衡调节方法.pdf
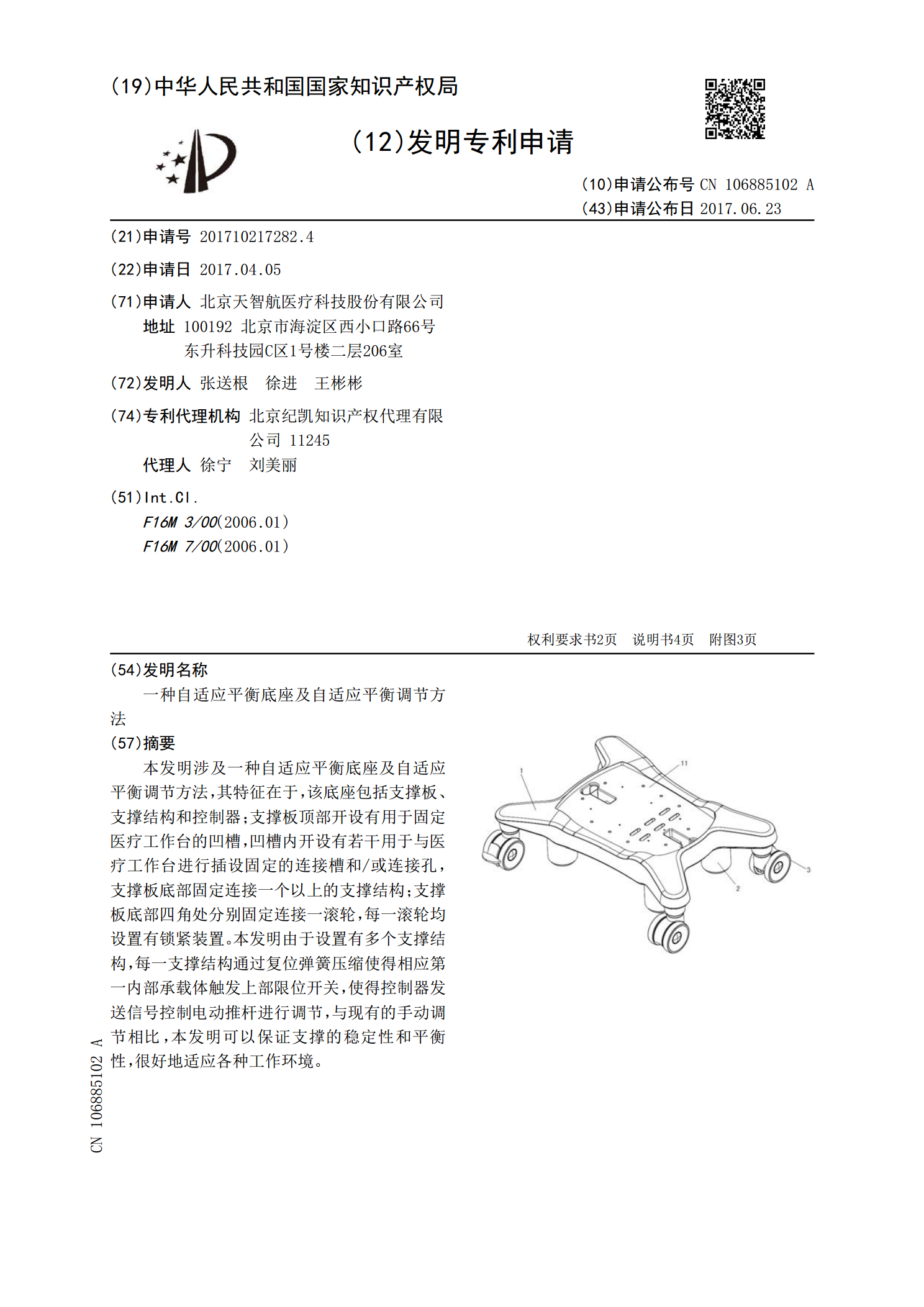
本发明涉及一种自适应平衡底座及自适应平衡调节方法,其特征在于,该底座包括支撑板、支撑结构和控制器;支撑板顶部开设有用于固定医疗工作台的凹槽,凹槽内开设有若干用于与医疗工作台进行插设固定的连接槽和/或连接孔,支撑板底部固定连接一个以上的支撑结构;支撑板底部四角处分别固定连接一滚轮,每一滚轮均设置有锁紧装置。本发明由于设置有多个支撑结构,每一支撑结构通过复位弹簧压缩使得相应第一内部承载体触发上部限位开关,使得控制器发送信号控制电动推杆进行调节,与现有的手动调节相比,本发明可以保证支撑的稳定性和平衡性,很好地适
自适应平衡底座及调节方法.pdf
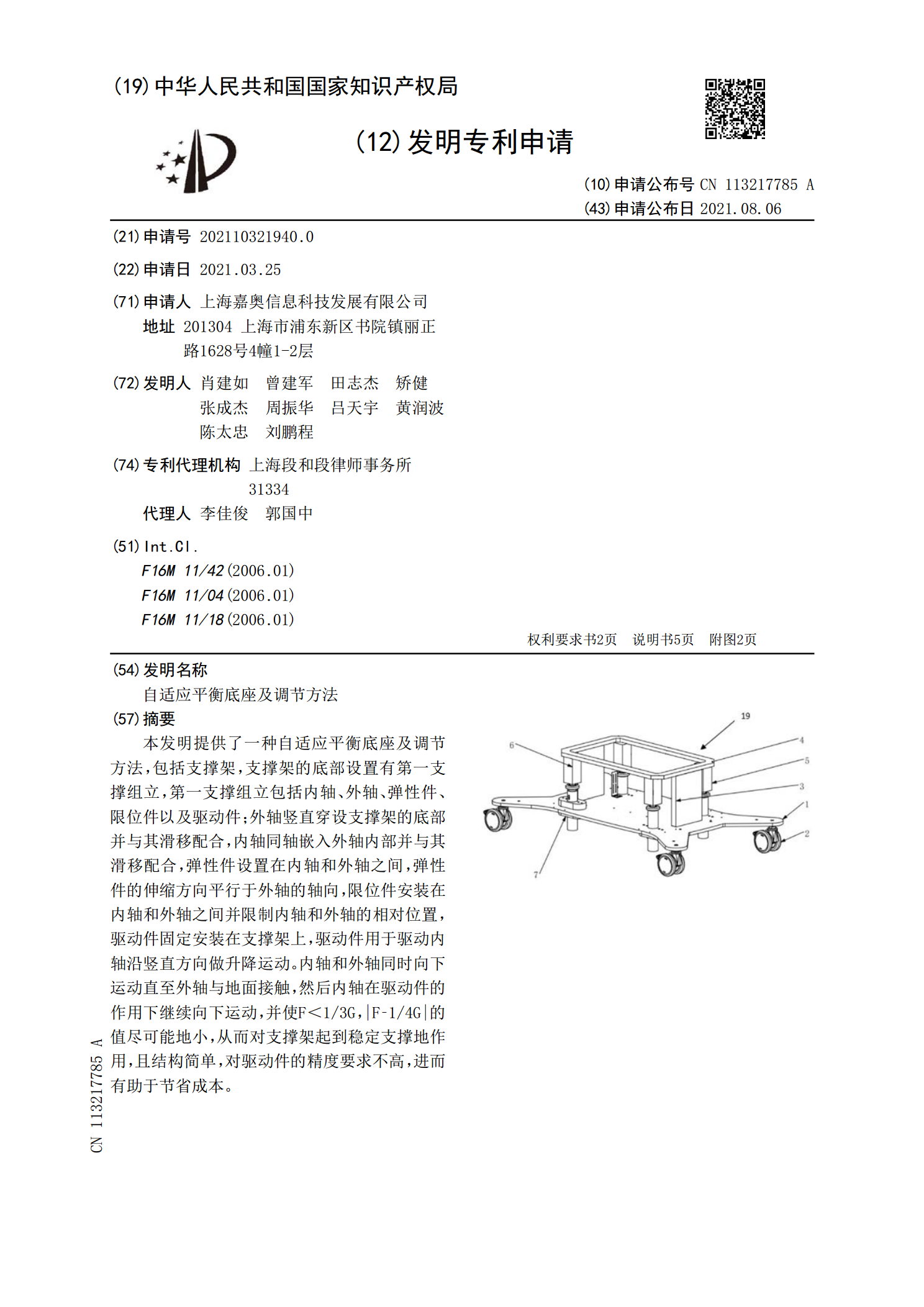
本发明提供了一种自适应平衡底座及调节方法,包括支撑架,支撑架的底部设置有第一支撑组立,第一支撑组立包括内轴、外轴、弹性件、限位件以及驱动件;外轴竖直穿设支撑架的底部并与其滑移配合,内轴同轴嵌入外轴内部并与其滑移配合,弹性件设置在内轴和外轴之间,弹性件的伸缩方向平行于外轴的轴向,限位件安装在内轴和外轴之间并限制内轴和外轴的相对位置,驱动件固定安装在支撑架上,驱动件用于驱动内轴沿竖直方向做升降运动。内轴和外轴同时向下运动直至外轴与地面接触,然后内轴在驱动件的作用下继续向下运动,并使F<1/3G,|F‑1/4G

一种自适应重力调节的底盘装置.pdf
本发明公开了一种自适应重力调节的底盘装置,包括:底盘组件,包括前连接座及后连接座,后连接座铰接在前连接座后端;弹性支撑板,沿前后方向横跨于前连接座和后连接座之间;在前连接座内设有可沿活动的支承部件,后连接座相对前连接座转动以撬动弹性支撑板以支承部件为转动支点发生弹性形变;弹性下沉机构,弹性下沉机构包括设置在后连接座内的沉槽、沉块及压簧;沉块上端设有用于连接椅座的后支杆;驱动机构,用于控制支承部件移动;驱动机构包括拉线及伸缩组件;拉线后端连接在沉块上,拉线前端设置在前连接座的前端并作为输出端,伸缩组件连接在

自适应农机底盘及控制方法.pdf
一种可适应于多地形的农机底盘及控制方法,属于农业机械技术领域,整个底盘由升降机构、电机、横梁、轮轴组件和滚轮连接构成;通过升降机构来实现滚轮的升降作业,从而实现履带轮与滚轮之间的切换选择,本发明既可以实现田间道路的行走作业,且行走稳定性较好,又可以实现平坦道路的行走作业,且行走效率较高,本发明结构简单,控制方法原理清晰,操作简单方便,满足了不同场地工况需求,进一步提高了运行工作效率。