
基于动态自适应LQR的智能农机自主作业控制方法及系统.pdf

子璇****君淑


1/10
2/10

3/10

4/10
5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于动态自适应LQR的智能农机自主作业控制方法及系统.pdf
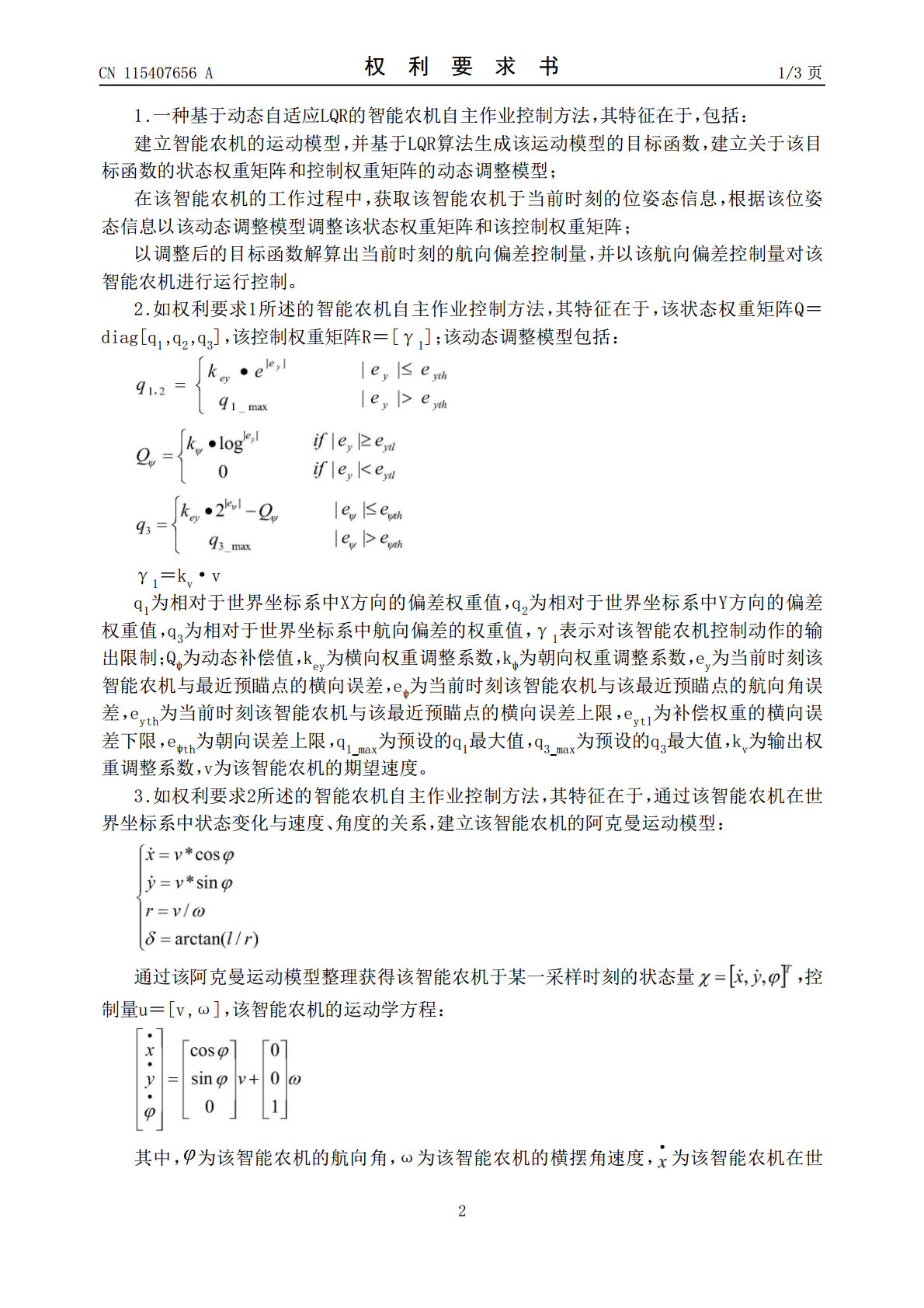
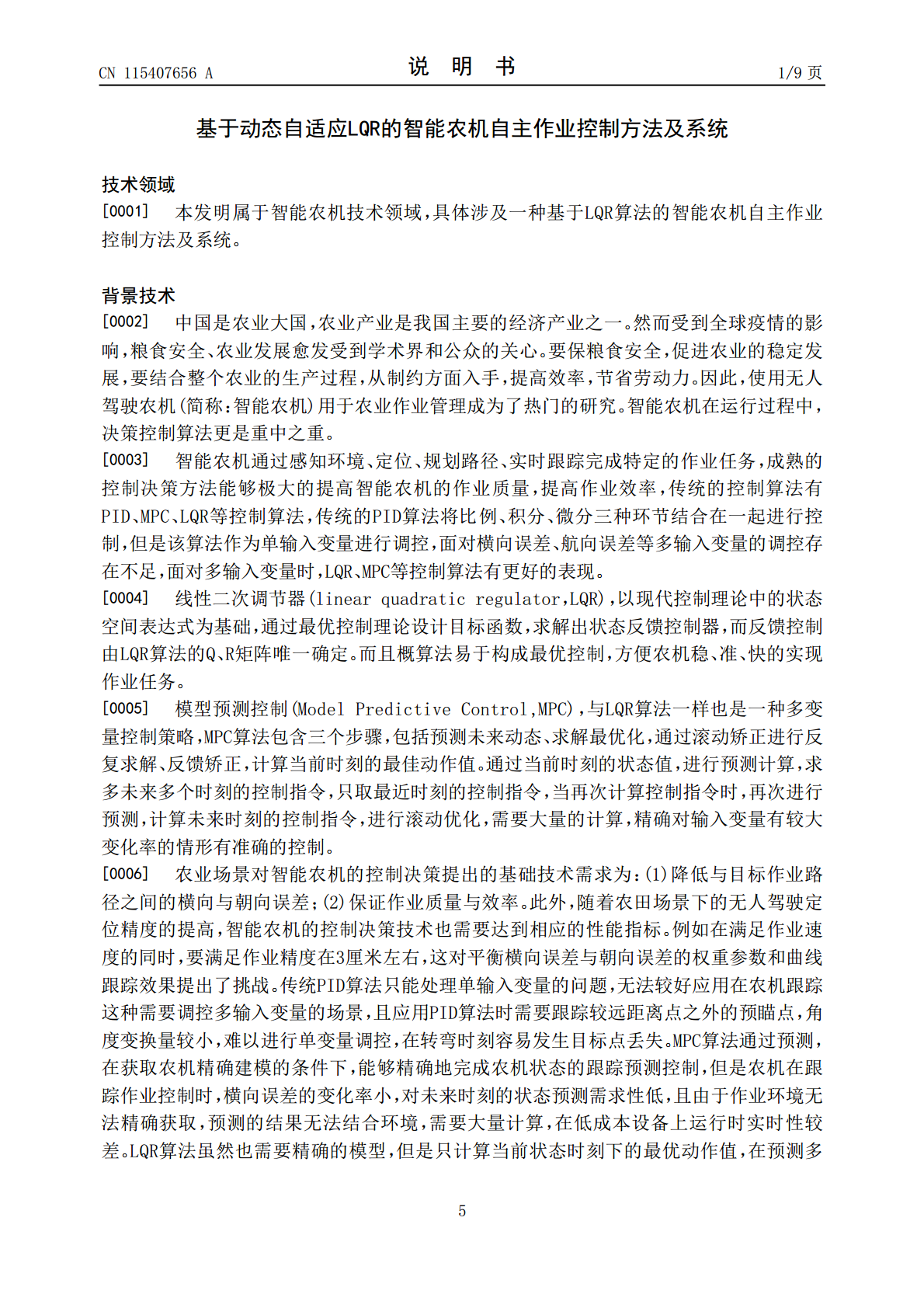
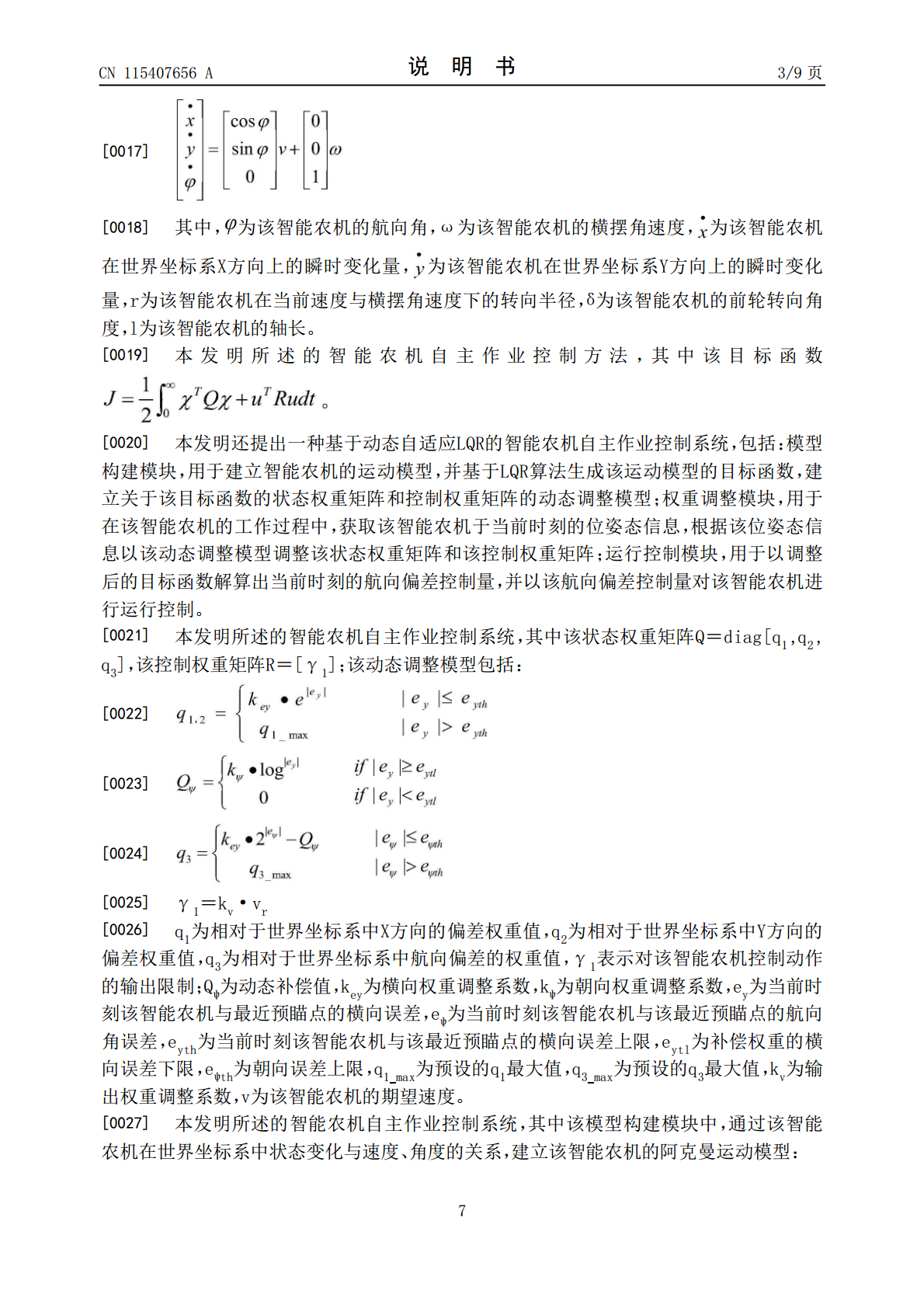
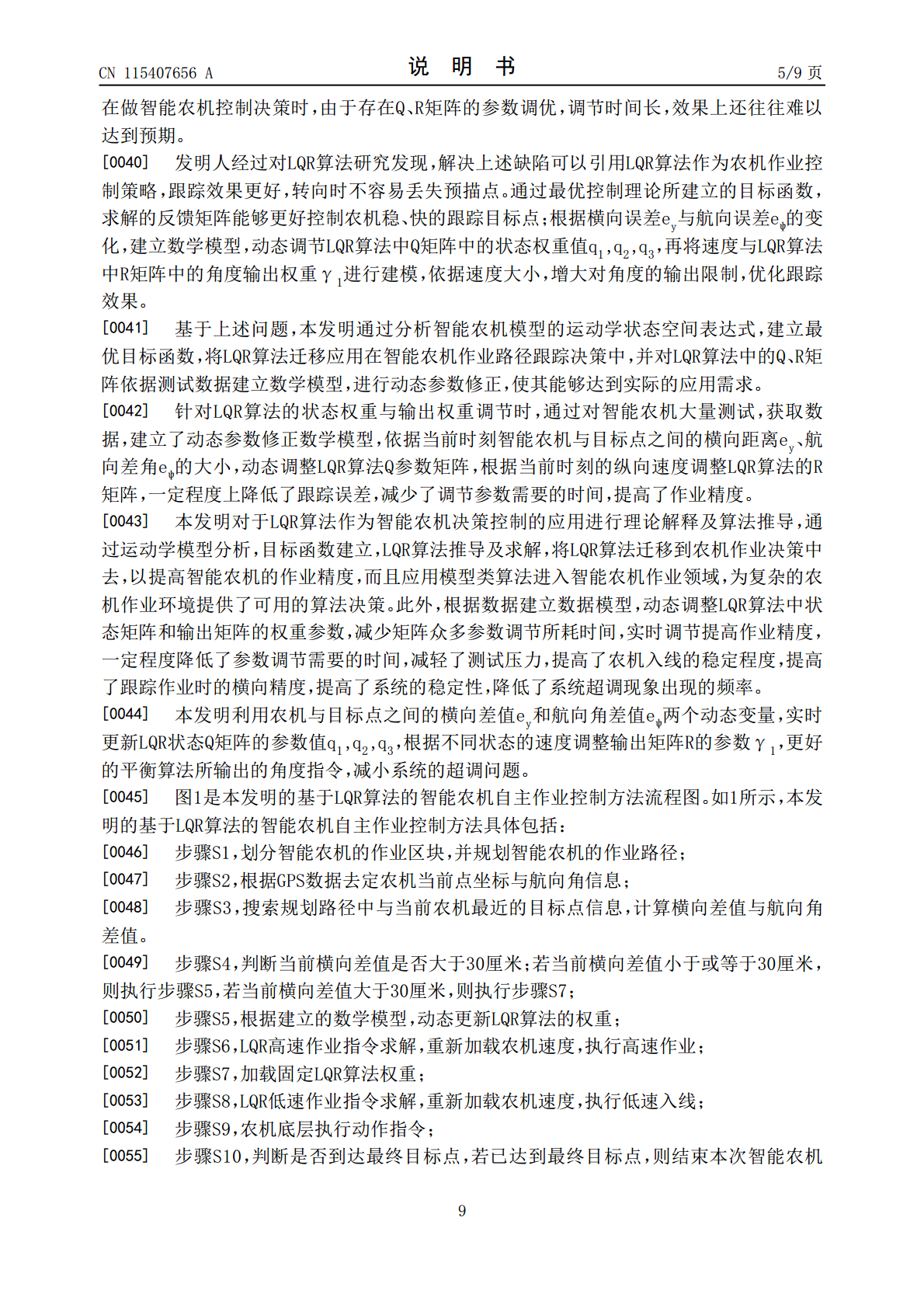
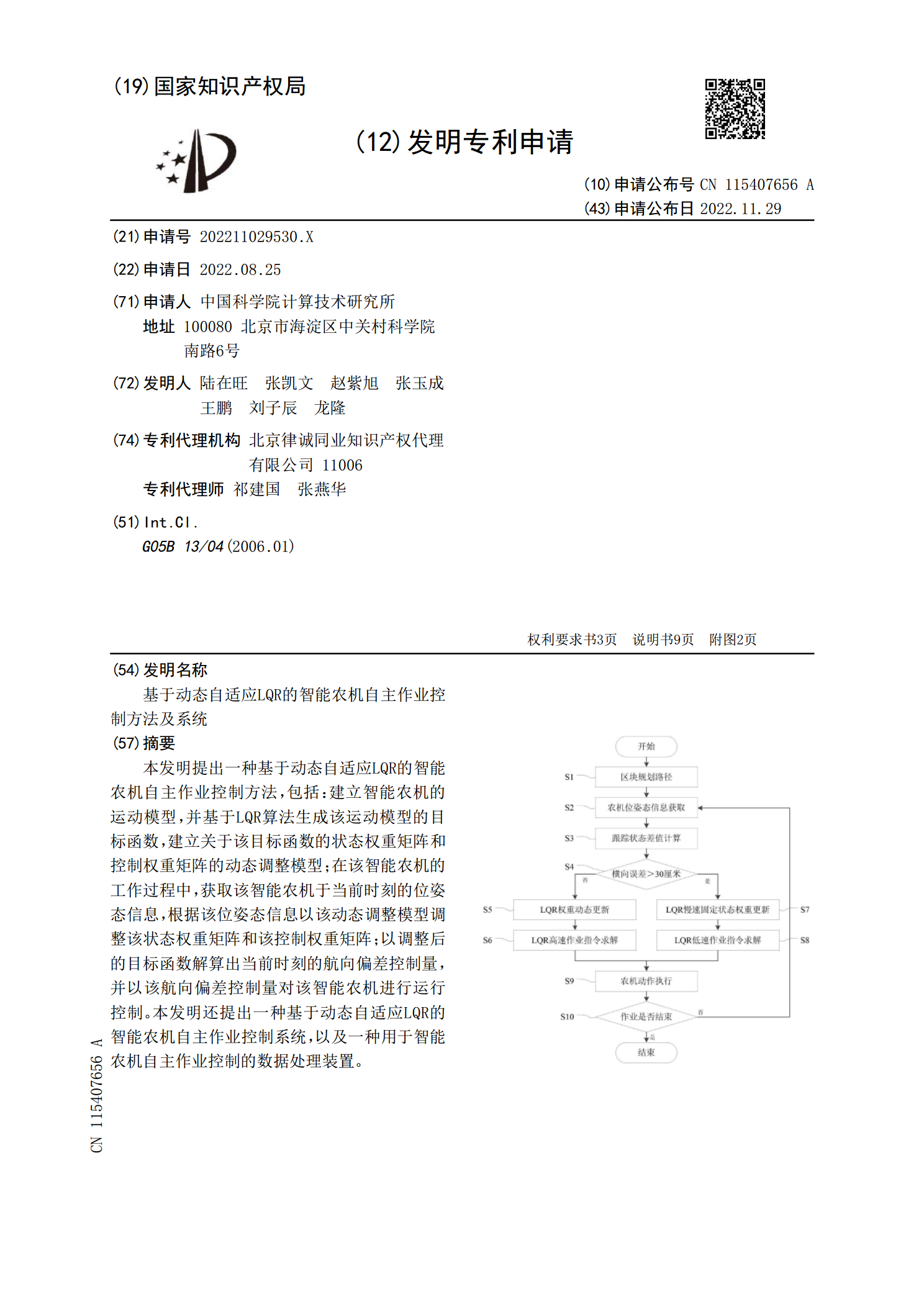
本发明提出一种基于动态自适应LQR的智能农机自主作业控制方法,包括:建立智能农机的运动模型,并基于LQR算法生成该运动模型的目标函数,建立关于该目标函数的状态权重矩阵和控制权重矩阵的动态调整模型;在该智能农机的工作过程中,获取该智能农机于当前时刻的位姿态信息,根据该位姿态信息以该动态调整模型调整该状态权重矩阵和该控制权重矩阵;以调整后的目标函数解算出当前时刻的航向偏差控制量,并以该航向偏差控制量对该智能农机进行运行控制。本发明还提出一种基于动态自适应LQR的智能农机自主作业控制系统,以及一种用于智能农机自

基于自适应动态规划方法的智能微网系统电能优化协调控制的任务书.docx
基于自适应动态规划方法的智能微网系统电能优化协调控制的任务书任务书课题名称:基于自适应动态规划方法的智能微网系统电能优化协调控制1.研究背景与意义随着能源消费量的不断增加和能源结构的不断调整,能源管理成为公共安全的重要组成部分。智能微网系统作为未来的能源智能化管理方案之一,可通过在不同的能源之间调节协调,实现对微网系统中各能源的优化使用,从而提高能源的效能与可靠性,降低能源成本,提高能源利用率。针对智能微网系统的电能优化协调控制,自适应动态规划方法是近年来被广泛研究的一种有效的优化控制方法,其在复杂系统控

基于自适应动态规划的智能空调能源系统自学习最优控制.docx
基于自适应动态规划的智能空调能源系统自学习最优控制基于自适应动态规划的智能空调能源系统自学习最优控制摘要:随着能源消耗的不断增加和环境问题的日益凸显,如何有效地利用能源成为一项重要的研究方向。智能空调能源系统具有巨大的能源节约潜力,但是传统的控制方法无法实现最优控制。本论文基于自适应动态规划算法,提出了一种智能空调能源系统自学习最优控制方法,以实现能源的高效利用。关键词:智能空调;能源系统;自学习最优控制;动态规划1.引言随着全球经济的发展和人口的增加,能源消耗不断增加,能源问题逐渐引起人们的关注。空调作

基于LQR的智能车辆路径跟踪控制研究.docx
基于LQR的智能车辆路径跟踪控制研究引言车辆是人类交通工具的重要组成部分之一,它的安全性、效率和智能化水平,直接关系到交通运输的发展和进步。智能车辆是近年来交通领域发展的热点和重点,其引领着行业的技术革新和发展。其中,路径跟踪控制技术是智能车辆关键技术之一,在完善车辆自动驾驶功能和提高车辆行驶安全性上具有重要作用。本文旨在探讨基于LQR的智能车辆路径跟踪控制,并结合实际案例进行论述。一、智能车辆路径跟踪控制技术研究1.1路径规划智能车辆需要进行路径规划,才能确定前进方向和选择行驶路线。路径规划是通过车辆传

基于LQR的智能车辆路径跟踪控制研究.docx
基于LQR的智能车辆路径跟踪控制研究智能车辆路径跟踪控制是智能交通系统研究的重要领域之一。在现代交通系统中,路径跟踪控制的效果直接影响着车辆的安全性、稳定性和舒适性。本文将以基于线性二次调节器(LQR)的智能车辆路径跟踪控制研究为题,探讨该控制方法在路径跟踪中的应用。首先,我们需要明确路径跟踪控制的目标。路径跟踪控制的主要目标是使车辆能够按照给定的路径精确地行驶,同时保持良好的稳定性和舒适性。为了实现这一目标,研究者们提出了众多的路径跟踪控制方法,其中LQR是其中一种常用的方法。LQR是一种优化控制方法,