
一种利用轮廓信息的6D位姿估计方法.pdf

灵慧****89


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种利用轮廓信息的6D位姿估计方法.pdf
本发明提供了一种利用轮廓信息的6D位姿估计方法,包括:基于卷积神经网络设计目标物体6D位姿估计网络;采集和标注不同背景、角度和姿态的目标物体训练样本图片构建数据集,并对训练样本进行数据增强;对目标物体6D位姿估计网络进行训练,得到网络参数模型;调用目标物体6D位姿估计网络参数模型对目标物体图片进行预测,得到目标物体关键点二维投影坐标;由目标物体关键点二维投影坐标,利用EPnP计算出目标物体6D位姿。本发明方法在不需要位姿修正后处理的情况下,通过所设计的6D位姿估计网络,利用目标物体的轮廓信息快速准确地检测
一种机器人6D位姿估计系统及方法.pdf
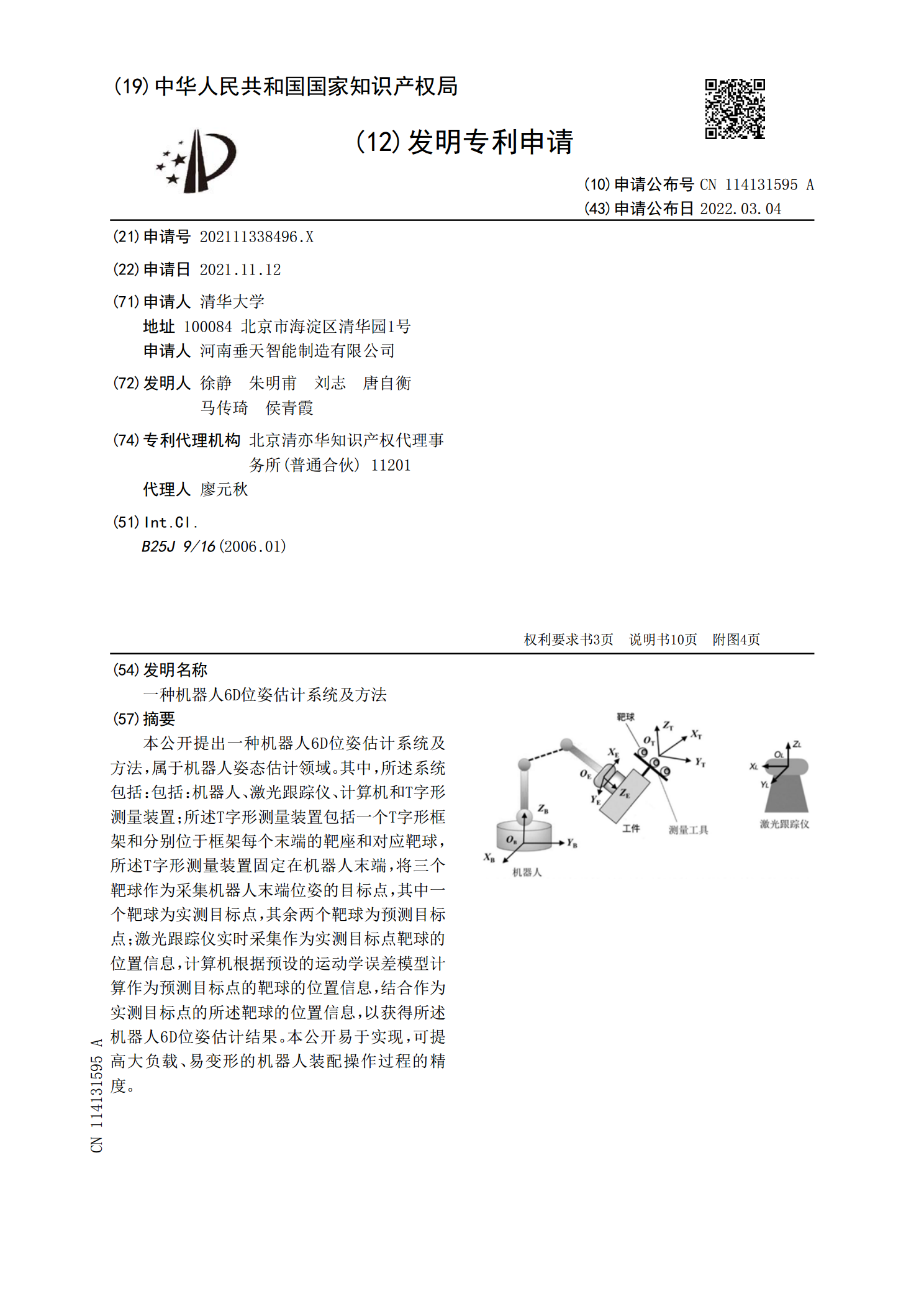
本公开提出一种机器人6D位姿估计系统及方法,属于机器人姿态估计领域。其中,所述系统包括:包括:机器人、激光跟踪仪、计算机和T字形测量装置;所述T字形测量装置包括一个T字形框架和分别位于框架每个末端的靶座和对应靶球,所述T字形测量装置固定在机器人末端,将三个靶球作为采集机器人末端位姿的目标点,其中一个靶球为实测目标点,其余两个靶球为预测目标点;激光跟踪仪实时采集作为实测目标点靶球的位置信息,计算机根据预设的运动学误差模型计算作为预测目标点的靶球的位置信息,结合作为实测目标点的所述靶球的位置信息,以获得所述机
一种基于轮廓提取点对特征的位姿估计方法.pdf
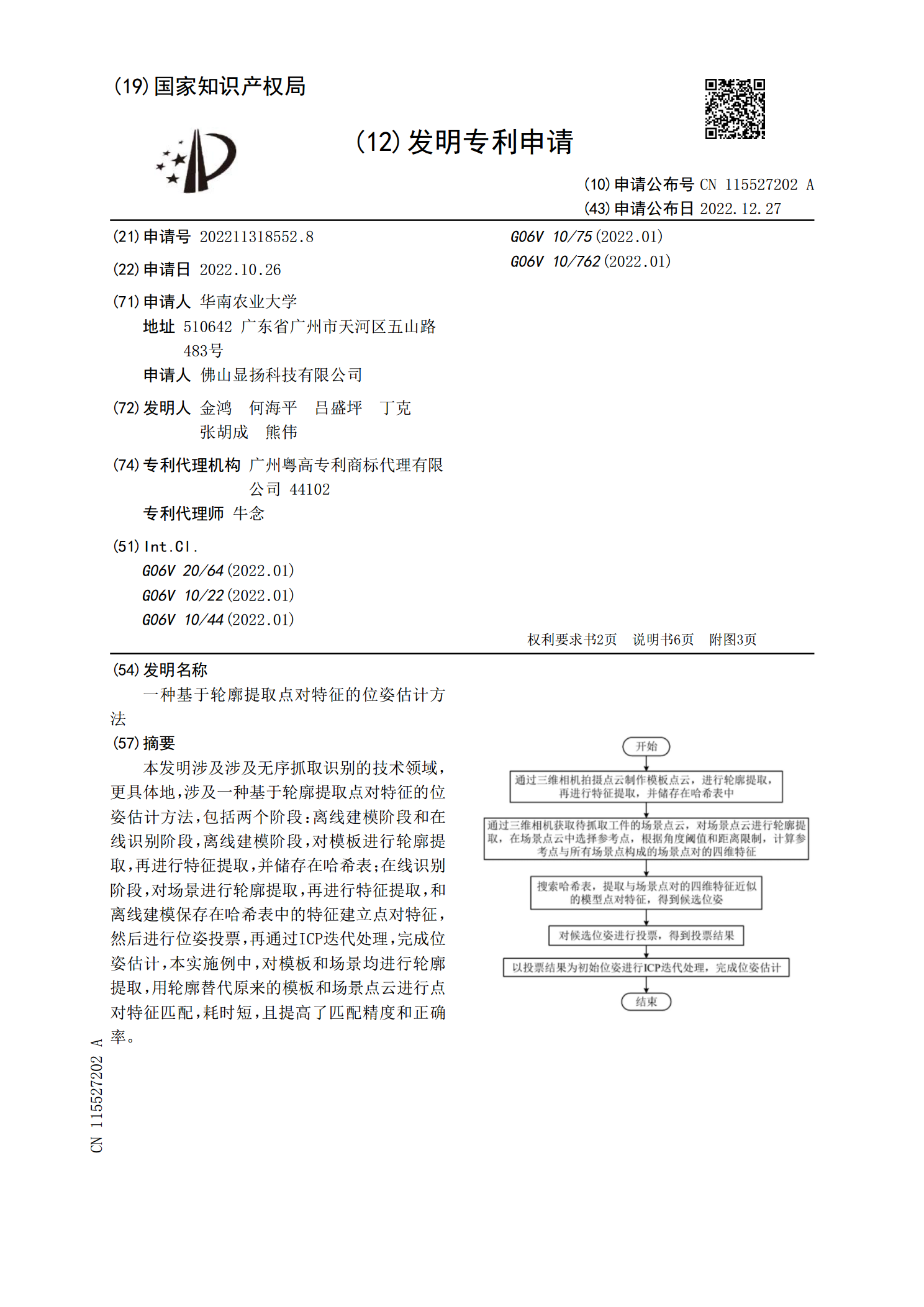
本发明涉及涉及无序抓取识别的技术领域,更具体地,涉及一种基于轮廓提取点对特征的位姿估计方法,包括两个阶段:离线建模阶段和在线识别阶段,离线建模阶段,对模板进行轮廓提取,再进行特征提取,并储存在哈希表;在线识别阶段,对场景进行轮廓提取,再进行特征提取,和离线建模保存在哈希表中的特征建立点对特征,然后进行位姿投票,再通过ICP迭代处理,完成位姿估计,本实施例中,对模板和场景均进行轮廓提取,用轮廓替代原来的模板和场景点云进行点对特征匹配,耗时短,且提高了匹配精度和正确率。
基于深度学习的迭代6D位姿估计方法及装置.pdf
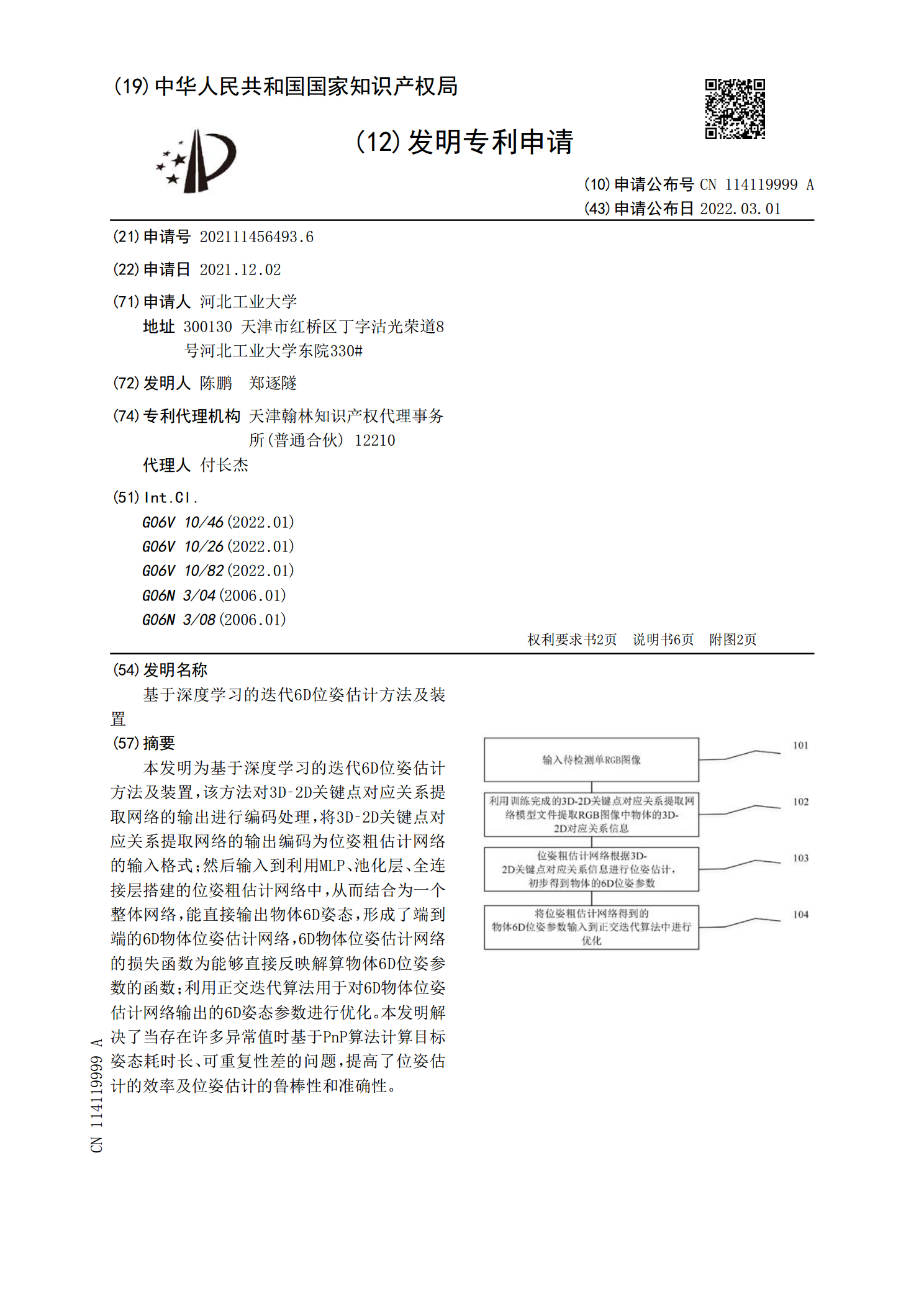
本发明为基于深度学习的迭代6D位姿估计方法及装置,该方法对3D‑2D关键点对应关系提取网络的输出进行编码处理,将3D‑2D关键点对应关系提取网络的输出编码为位姿粗估计网络的输入格式;然后输入到利用MLP、池化层、全连接层搭建的位姿粗估计网络中,从而结合为一个整体网络,能直接输出物体6D姿态,形成了端到端的6D物体位姿估计网络,6D物体位姿估计网络的损失函数为能够直接反映解算物体6D位姿参数的函数;利用正交迭代算法用于对6D物体位姿估计网络输出的6D姿态参数进行优化。本发明解决了当存在许多异常值时基于PnP
一种6D位姿估计数据集制作方法、装置、终端及介质.pdf
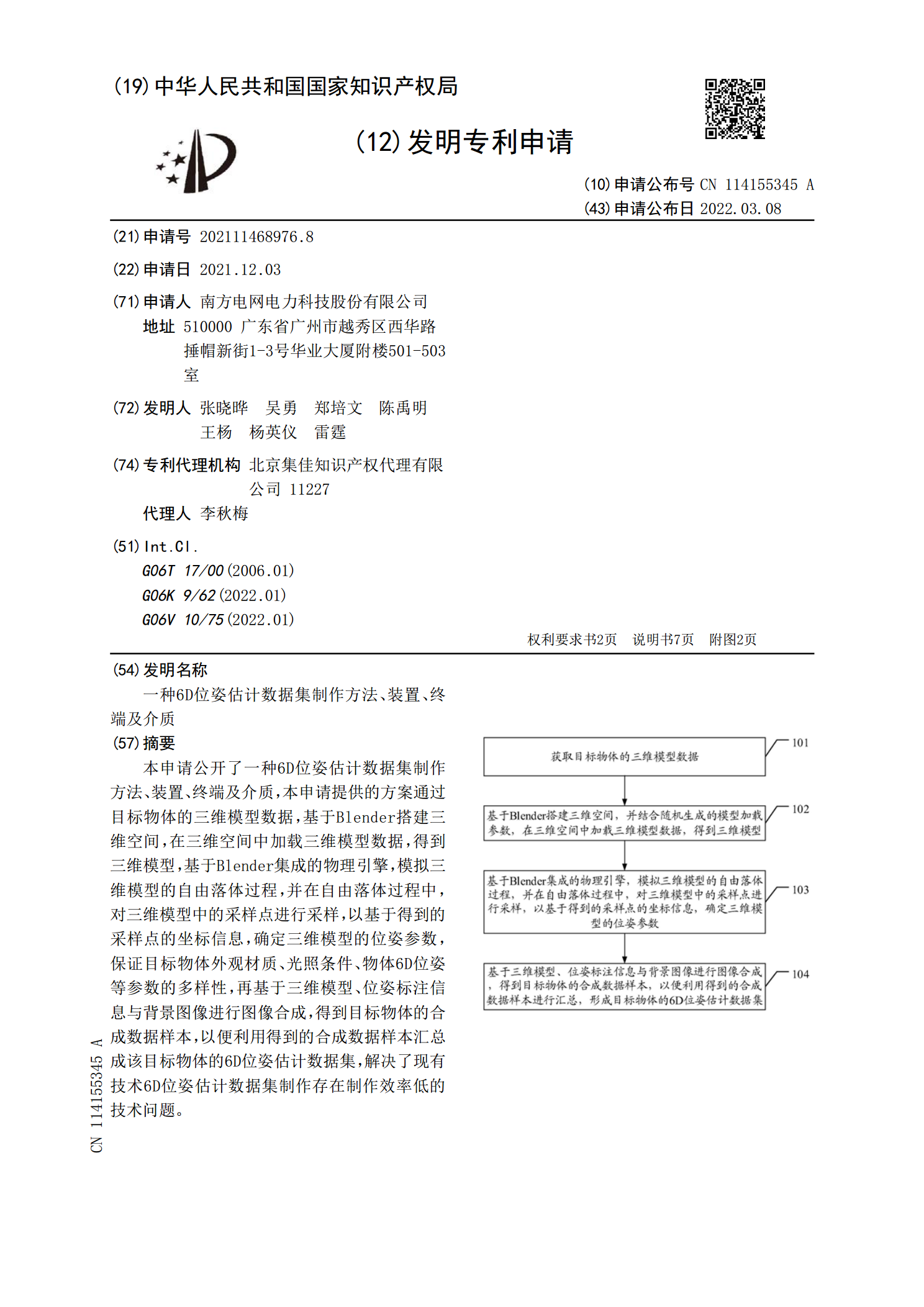
本申请公开了一种6D位姿估计数据集制作方法、装置、终端及介质,本申请提供的方案通过目标物体的三维模型数据,基于Blender搭建三维空间,在三维空间中加载三维模型数据,得到三维模型,基于Blender集成的物理引擎,模拟三维模型的自由落体过程,并在自由落体过程中,对三维模型中的采样点进行采样,以基于得到的采样点的坐标信息,确定三维模型的位姿参数,保证目标物体外观材质、光照条件、物体6D位姿等参数的多样性,再基于三维模型、位姿标注信息与背景图像进行图像合成,得到目标物体的合成数据样本,以便利用得到的合成数据