
一种基于轮廓上曲率估计的图像特征点提取方法.pdf

一吃****瀚文


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于轮廓上曲率估计的图像特征点提取方法.pdf
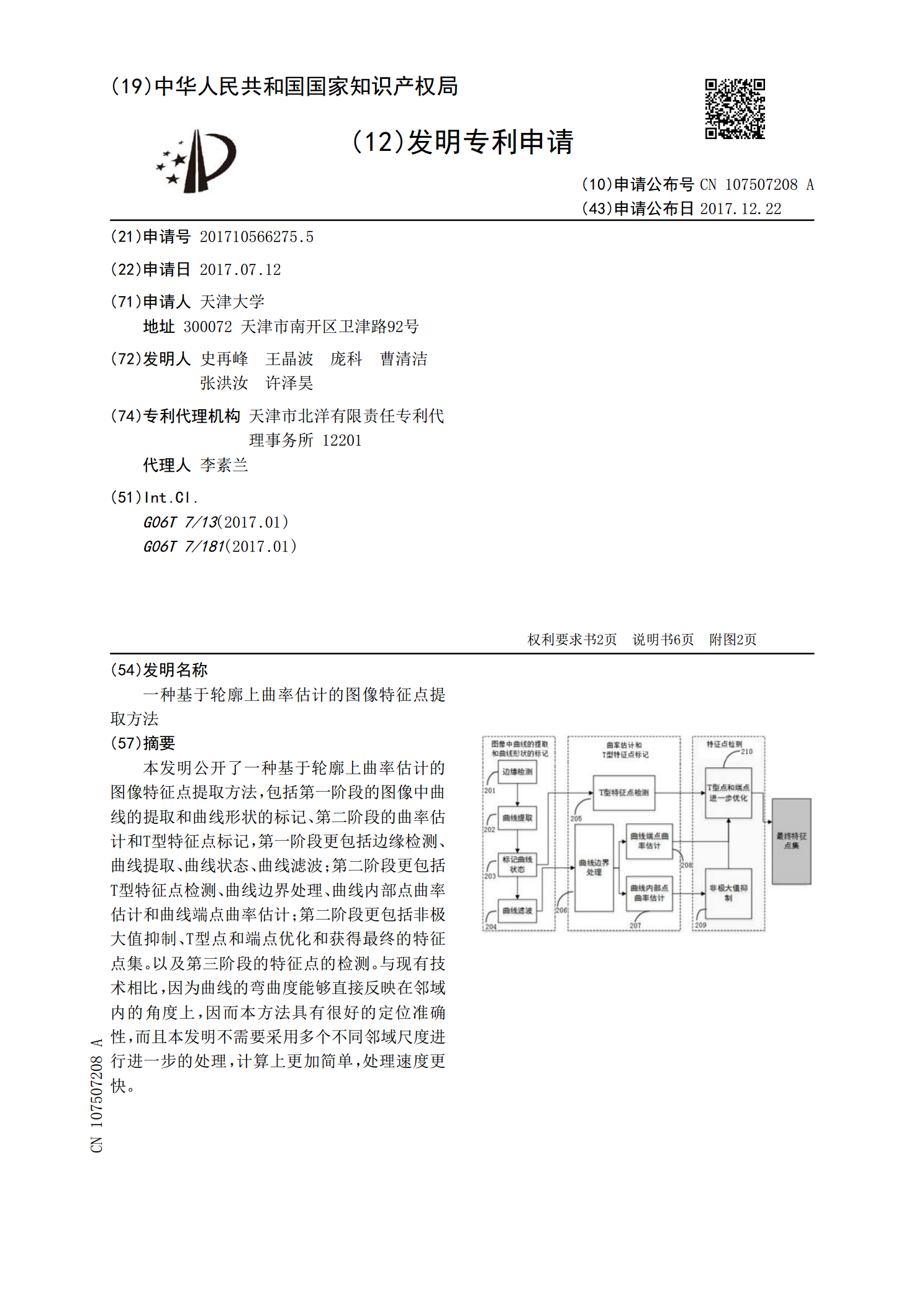
本发明公开了一种基于轮廓上曲率估计的图像特征点提取方法,包括第一阶段的图像中曲线的提取和曲线形状的标记、第二阶段的曲率估计和T型特征点标记,第一阶段更包括边缘检测、曲线提取、曲线状态、曲线滤波;第二阶段更包括T型特征点检测、曲线边界处理、曲线内部点曲率估计和曲线端点曲率估计;第二阶段更包括非极大值抑制、T型点和端点优化和获得最终的特征点集。以及第三阶段的特征点的检测。与现有技术相比,因为曲线的弯曲度能够直接反映在邻域内的角度上,因而本方法具有很好的定位准确性,而且本发明不需要采用多个不同邻域尺度进行进一步
一种基于轮廓提取点对特征的位姿估计方法.pdf
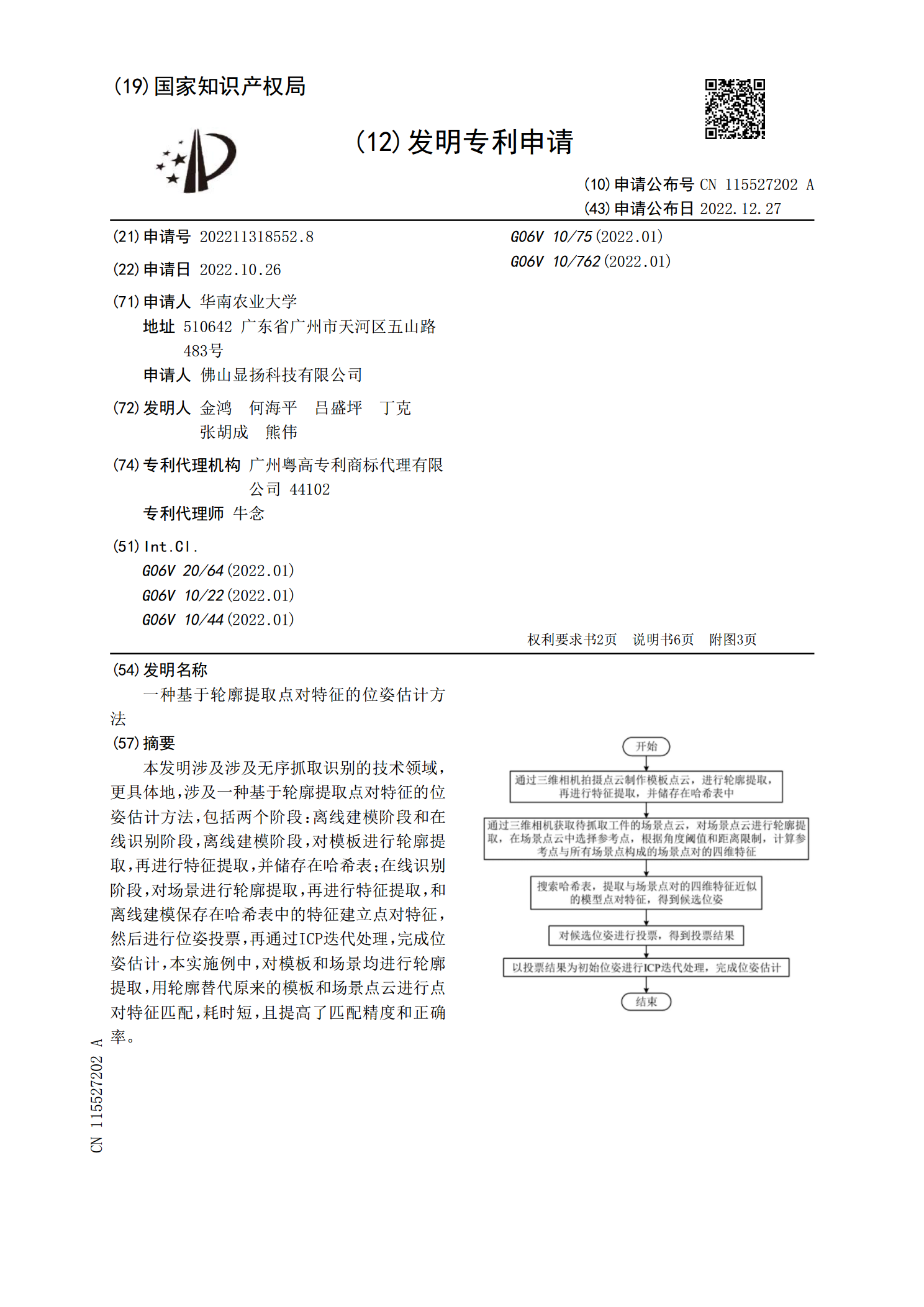
本发明涉及涉及无序抓取识别的技术领域,更具体地,涉及一种基于轮廓提取点对特征的位姿估计方法,包括两个阶段:离线建模阶段和在线识别阶段,离线建模阶段,对模板进行轮廓提取,再进行特征提取,并储存在哈希表;在线识别阶段,对场景进行轮廓提取,再进行特征提取,和离线建模保存在哈希表中的特征建立点对特征,然后进行位姿投票,再通过ICP迭代处理,完成位姿估计,本实施例中,对模板和场景均进行轮廓提取,用轮廓替代原来的模板和场景点云进行点对特征匹配,耗时短,且提高了匹配精度和正确率。

一种基于图像轮廓Freeman链码的角点特征提取方法.pdf
一种基于图像轮廓Freeman链码的角点特征提取方法,在对图像预处理后,首先提取多边形轮廓,再将多边形轮廓用Freeman链码进行编码,计算一阶差别码,然后区分出局部角点、非局部角点和可疑点,利用曲率和距离过滤可疑点,得到多边形轮廓的所有局部角点,然后利用角点连线的夹角和角点的曲率曲率做最后筛选。本发明可在不增加太多步骤的同时,既保留了原有算法计算效率高的优点,又针对实际使用时复杂多变的情况,稳定了算法的运行时间和角点的数量,并且保证角点的质量,有利于学习到更有效的物体特征。

基于图像特征分析的物体轮廓提取.docx
基于图像特征分析的物体轮廓提取基于图像特征分析的物体轮廓提取摘要:物体轮廓提取是计算机视觉中的一个重要任务,它在许多领域中都有广泛的应用,如图像分割、目标识别和物体跟踪等。本文提出了一种基于图像特征分析的物体轮廓提取方法,该方法融合了边缘检测、颜色分析和纹理分析等多种特征,通过组合这些特征来提取物体的边缘信息。实验结果表明,该方法能够有效地提取物体的轮廓,并且对于复杂背景和光照变化具有较强的鲁棒性。1.引言物体轮廓提取是计算机视觉领域中一个非常重要的研究方向,其主要任务是从图像中提取出物体的边缘信息。物体

基于轮廓提取的工业图像特征识别方法及系统.pdf
本发明提供一种基于轮廓提取的工业图像特征识别方法及系统,其中的方法包括:提取工业原始图像的特征轮廓信息,获取工业原始图像的各部分检测区域的位置信息;对各部分检测区域进行特征识别检测;对各部分检测区域的检测结果进行整合,并将整合后的检测结果返回。利用本发明,能够解决目前难度较大的图像处理主要靠人工识别的问题。