
一种基于机器视觉的自动喷药机器人.pdf

小沛****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器视觉的自动喷药机器人.pdf
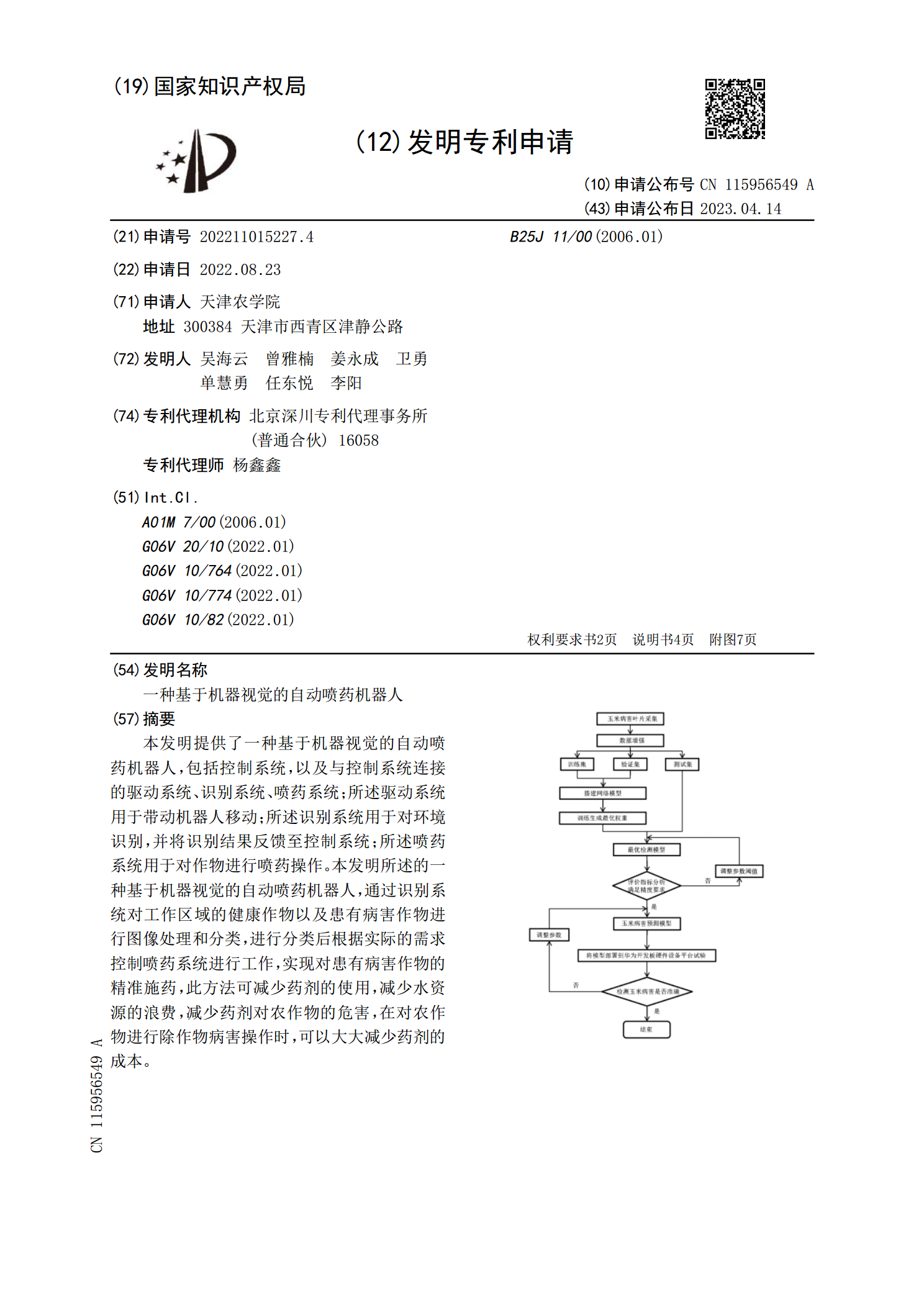
本发明提供了一种基于机器视觉的自动喷药机器人,包括控制系统,以及与控制系统连接的驱动系统、识别系统、喷药系统;所述驱动系统用于带动机器人移动;所述识别系统用于对环境识别,并将识别结果反馈至控制系统;所述喷药系统用于对作物进行喷药操作。本发明所述的一种基于机器视觉的自动喷药机器人,通过识别系统对工作区域的健康作物以及患有病害作物进行图像处理和分类,进行分类后根据实际的需求控制喷药系统进行工作,实现对患有病害作物的精准施药,此方法可减少药剂的使用,减少水资源的浪费,减少药剂对农作物的危害,在对农作物进行除作物

温室自动喷药机器人.pdf
本发明涉及设施农业智能装备技术领域,特别涉及一种温室自动喷药机器人,其包括轨道行走部件、固定于所述轨道行走部件上的药液喷施部件以及分别与所述轨道行走部件和药液喷施部件连接的控制部件;所述轨道行走部件包括驱动装置和轨道轮,所述轨道轮行走于一组轨道上,所述控制部件用于自动控制所述轨道行走部件的行走以及药液喷施部件的喷施。本发明提供的温室自动喷药机器人,以轨道轮为支撑,并行走于轨道上,只需在地面铺设轨道,不需要搭建支撑架,成本低适于在小型温室内使用。此外,这种轨道自动行走方式对温室内不平整路面的适应性较强,在凹
基于机器视觉的全自动仓储机器人.pdf
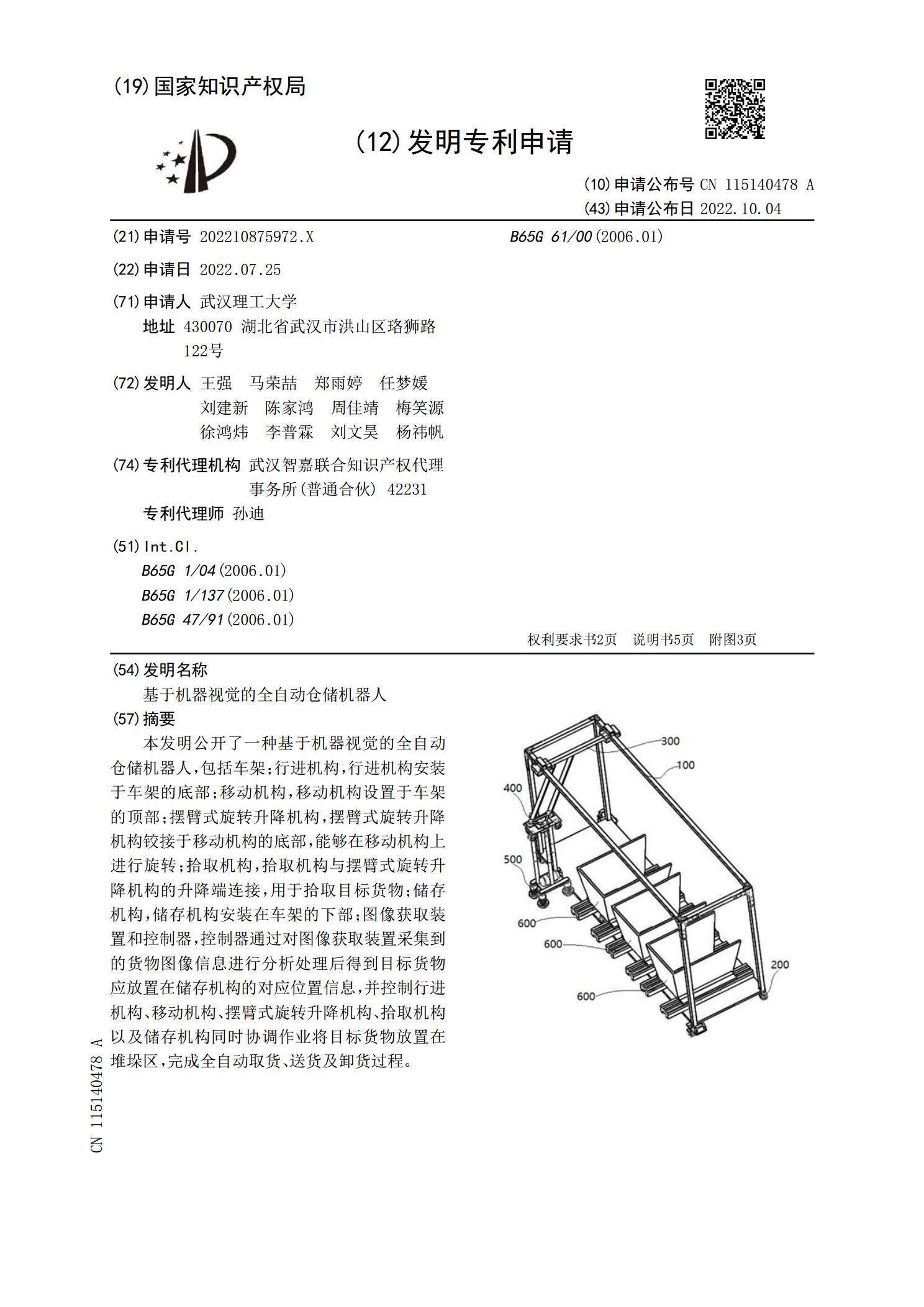
本发明公开了一种基于机器视觉的全自动仓储机器人,包括车架;行进机构,行进机构安装于车架的底部;移动机构,移动机构设置于车架的顶部;摆臂式旋转升降机构,摆臂式旋转升降机构铰接于移动机构的底部,能够在移动机构上进行旋转;拾取机构,拾取机构与摆臂式旋转升降机构的升降端连接,用于拾取目标货物;储存机构,储存机构安装在车架的下部;图像获取装置和控制器,控制器通过对图像获取装置采集到的货物图像信息进行分析处理后得到目标货物应放置在储存机构的对应位置信息,并控制行进机构、移动机构、摆臂式旋转升降机构、拾取机构以及储存机

基于机器视觉的自动喷涂机器人检测系统.pdf
本发明公开了基于机器视觉的自动喷涂机器人检测系统,包括工作台面和空心柱,所述工作台面顶端的两侧设置有空心柱,所述空心柱的顶端设置有顶架,所述顶架顶端的一侧设置有成品检测机构,所述顶架顶端的另一侧设置有储料罐,所述工作台面的顶端设置有转台,所述转台的底端设置有转动机构。该基于机器视觉的自动喷涂机器人检测系统通过设置有步进电机、驱动轴、转向锥齿、转轴和盘齿,步进电机带动驱动轴转动,转向锥齿带动与之啮合的盘齿旋转,从而带动转轴转动,转台带动工件台转动,喷涂机器人喷涂完毕一组工件,定位杆转动45°,若检测不合格,
一种机器视觉的网球自动捡球机器人.pdf
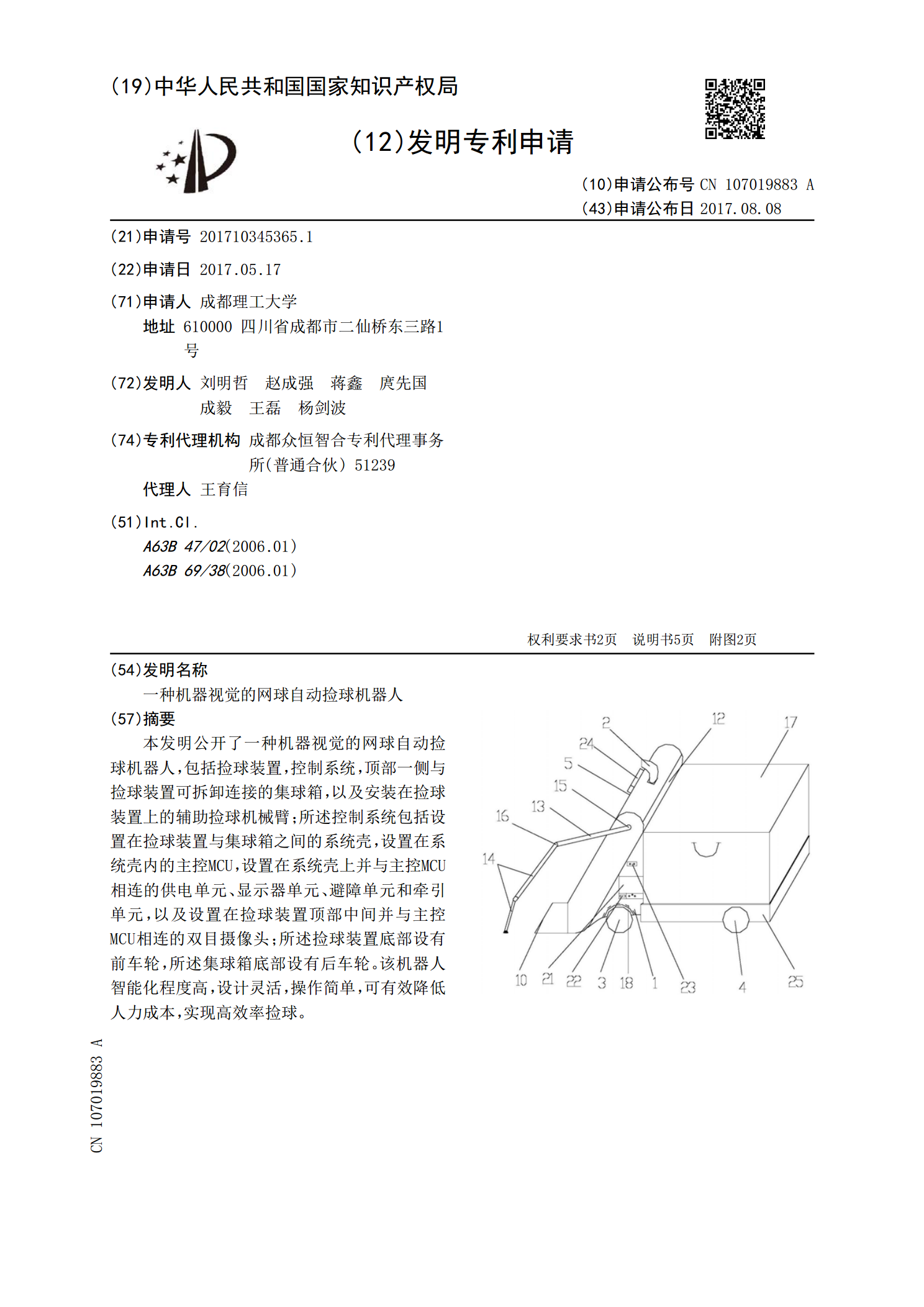
本发明公开了一种机器视觉的网球自动捡球机器人,包括捡球装置,控制系统,顶部一侧与捡球装置可拆卸连接的集球箱,以及安装在捡球装置上的辅助捡球机械臂;所述控制系统包括设置在捡球装置与集球箱之间的系统壳,设置在系统壳内的主控MCU,设置在系统壳上并与主控MCU相连的供电单元、显示器单元、避障单元和牵引单元,以及设置在捡球装置顶部中间并与主控MCU相连的双目摄像头;所述捡球装置底部设有前车轮,所述集球箱底部设有后车轮。该机器人智能化程度高,设计灵活,操作简单,可有效降低人力成本,实现高效率捡球。