
基于机器视觉的自动喷涂机器人检测系统.pdf

努力****爱静


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于机器视觉的自动喷涂机器人检测系统.pdf
本发明公开了基于机器视觉的自动喷涂机器人检测系统,包括工作台面和空心柱,所述工作台面顶端的两侧设置有空心柱,所述空心柱的顶端设置有顶架,所述顶架顶端的一侧设置有成品检测机构,所述顶架顶端的另一侧设置有储料罐,所述工作台面的顶端设置有转台,所述转台的底端设置有转动机构。该基于机器视觉的自动喷涂机器人检测系统通过设置有步进电机、驱动轴、转向锥齿、转轴和盘齿,步进电机带动驱动轴转动,转向锥齿带动与之啮合的盘齿旋转,从而带动转轴转动,转台带动工件台转动,喷涂机器人喷涂完毕一组工件,定位杆转动45°,若检测不合格,

基于视觉检测技术的机器人自动贴片系统设计.docx
基于视觉检测技术的机器人自动贴片系统设计一、绪论随着现代生产自动化程度不断提高,生产速度与质量也成为了制造企业的重要关注点。机器人技术的发展与普及为生产企业提供了更高效、稳定、精准的生产解决方案。机器人自动贴片系统作为应用机器人技术的产物,不仅大大提高了生产效率,同时还明显降低了人工操作误差,并且经过准确的视觉检测,确保生产质量的稳定性。本文基于视觉检测技术的机器人自动贴片系统设计进行了详细阐述。二、机器人自动贴片技术概述机器人自动贴片技术是一种将贴片过程中的人工操作全部自动化的生产工艺。机器人自动贴片技

基于机器视觉的机器人辅助折弯离线自动编程系统的研究.docx
基于机器视觉的机器人辅助折弯离线自动编程系统的研究随着制造业的发展,机器人逐渐在生产线上扮演越来越重要的角色。在机器人任务中,机器人的折弯任务也逐渐受到了广泛的关注。与此同时,机器视觉技术也逐渐发展成为机器人系统的重要支撑。本文主要介绍一种基于机器视觉的机器人辅助折弯离线自动编程系统的研究。首先,本文将介绍机器人折弯任务的应用背景和技术要求。机器人折弯任务通常需要完成的任务包括工件的固定、弯曲和放置等操作,具体要求包括如下四方面:一是要求高精度的加工,能够对尺寸和几何形状进行精确定位,控制精度要求达到百分
基于机器视觉的全自动仓储机器人.pdf
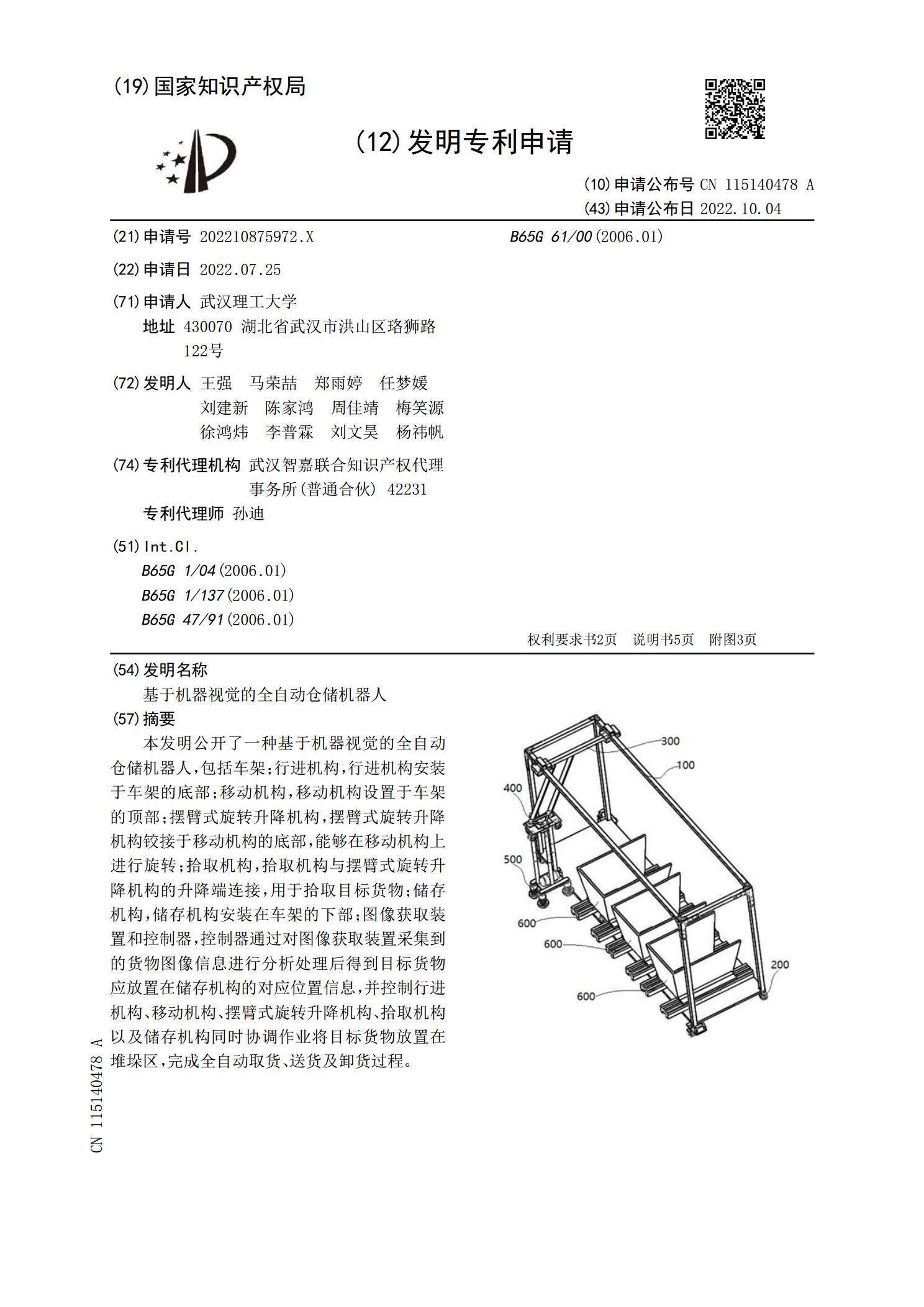
本发明公开了一种基于机器视觉的全自动仓储机器人,包括车架;行进机构,行进机构安装于车架的底部;移动机构,移动机构设置于车架的顶部;摆臂式旋转升降机构,摆臂式旋转升降机构铰接于移动机构的底部,能够在移动机构上进行旋转;拾取机构,拾取机构与摆臂式旋转升降机构的升降端连接,用于拾取目标货物;储存机构,储存机构安装在车架的下部;图像获取装置和控制器,控制器通过对图像获取装置采集到的货物图像信息进行分析处理后得到目标货物应放置在储存机构的对应位置信息,并控制行进机构、移动机构、摆臂式旋转升降机构、拾取机构以及储存机

基于机器人视觉的坩埚缺陷检测系统.docx
基于机器人视觉的坩埚缺陷检测系统基于机器人视觉的坩埚缺陷检测系统摘要:坩埚是一种重要的实验室设备,常用于化学实验和材料研究中。然而,由于使用频繁以及极端条件下的使用,坩埚容易受到磨损和破损。本论文提出了基于机器人视觉的坩埚缺陷检测系统,旨在解决传统手动检测方法的繁琐和不准确问题。该系统基于深度学习技术,通过对坩埚表面的图像进行分析和处理,自动检测和识别坩埚缺陷。实验结果表明,该系统能够高效、准确地检测坩埚的缺陷,并提高工作效率和安全性。关键词:机器人视觉,坩埚,缺陷检测,深度学习,图像处理1.引言坩埚是一