
一种高精度的组合导航定位方法.pdf

梅雪****67


1/7

2/7

3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高精度的组合导航定位方法.pdf
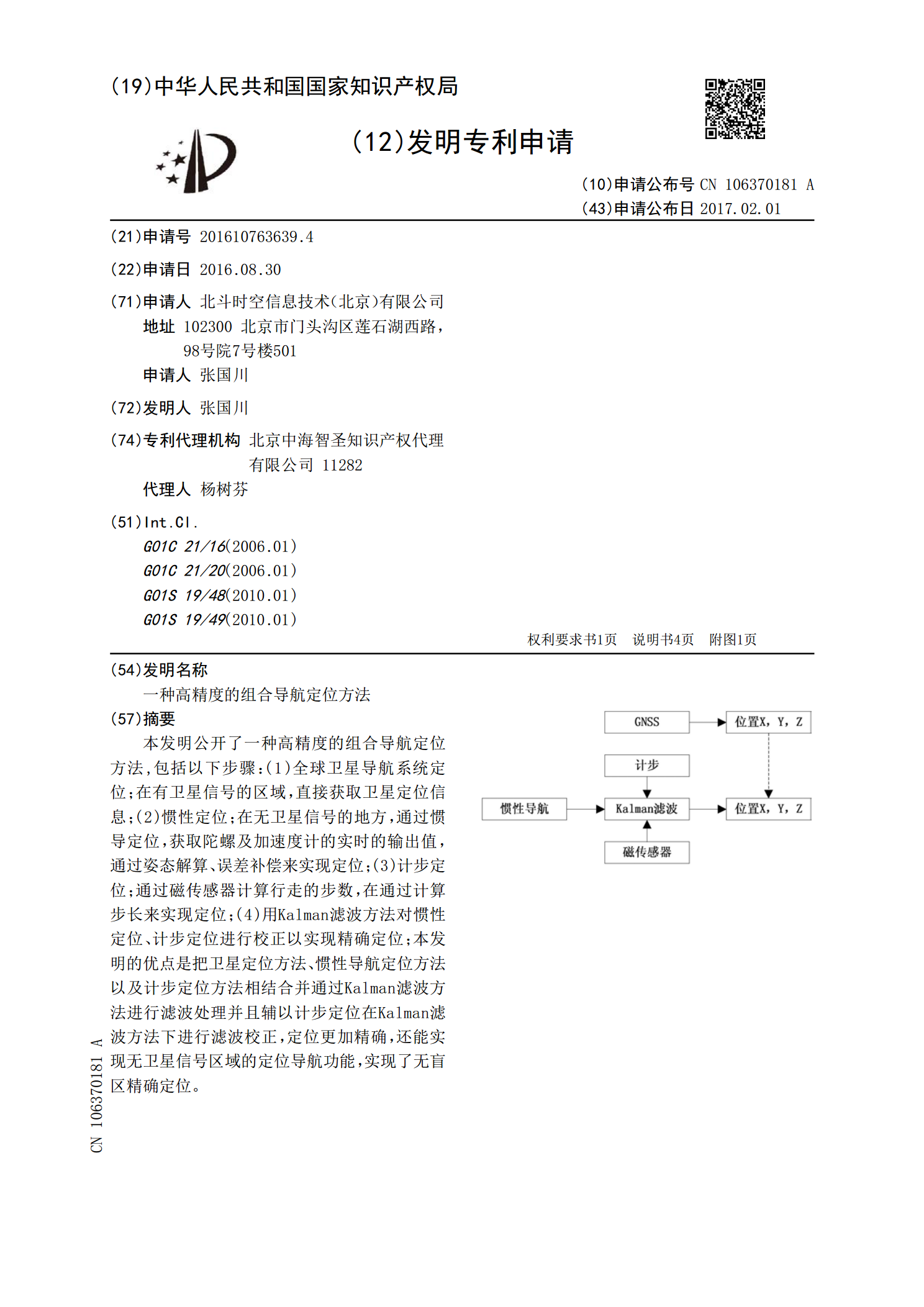
本发明公开了一种高精度的组合导航定位方法,包括以下步骤:(1)全球卫星导航系统定位;在有卫星信号的区域,直接获取卫星定位信息;(2)惯性定位;在无卫星信号的地方,通过惯导定位,获取陀螺及加速度计的实时的输出值,通过姿态解算、误差补偿来实现定位;(3)计步定位;通过磁传感器计算行走的步数,在通过计算步长来实现定位;(4)用Kalman滤波方法对惯性定位、计步定位进行校正以实现精确定位;本发明的优点是把卫星定位方法、惯性导航定位方法以及计步定位方法相结合并通过Kalman滤波方法进行滤波处理并且辅以计步定位在

一种具有高精度导航定位功能的AGV平台及导航方法.pdf
本发明提供了一种环境适应力强、能有效避免误报错的具有高精度导航定位功能的AGV平台,以及基于该平台的导航方法。AGV平台包括含有四驱舵轮的车体(1),在车体的底面的中线上的不同位置设置有第一视觉相机(2)和第二视觉相机(3),该中线的走向与车体的前进方向一致,在车体的底面的另一条中线上且偏离车体的中心点还设置有第三视觉相机(4),在车体的底面中心点处设置有RFID读卡器(5)。其导航方法为:当该AGV平台前进时,第一视觉相机和第二视觉相机对前进路径进行俯拍,RFID读卡器不断扫描路径上标记的RFID信息,

一种车载高精度容错组合导航方法及系统.pdf
本发明涉及一种车载高精度容错组合导航方法及系统。该方法包括:基于捷联惯导系统的姿态输出与里程计的路程增量输出、多普勒雷达的速度输出,分别设计地理坐标系下载车位置解算算法和速度解算算法;研究里程计与多普勒雷达的误差模型,分别建立前述位置解算和速度解算的误差模型;采用间接法滤波进行组合导航设计,以捷联惯导系统误差、里程计误差、多普勒雷达误差等作为系统状态,将捷联惯导输出的位置、速度与前述位置解算、速度解算获得的对应信息分别相减作为量测,采用卡尔曼滤波设计高精度容错组合导航的滤波算法。本发明能够实现车辆精确导航

一种车载导航车辆组合定位装置及其组合定位方法.pdf
本发明公开了一种车载导航车辆组合定位装置及其组合定位方法,包括MCU组合导航计算模块、GNSS模块以及经MCU组合导航计算模块计算获得的定位输出,还包括车轮轮速脉冲计数器,由车轮轮速脉冲计数器和GNSS模块共同组合输入至MCU组合导航计算模块。定位方法包括读取车轮轮速脉冲数,获得轮速脉冲输入;利用轮速脉冲数递推计算位置,判断是否读入GNSS数据,以读入GNSS数据作为条件,读入可靠的GNSS数据;获得定位输出及误差修正等步骤。降低系统使用成本,提高定位可靠有效性,可得到与原来INS/GNSS组合同样效果,

一种基于多方法融合的深水高精度导航定位技术.pdf
本发明提供一种基于多方法融合的深水高精度导航定位技术,涉及深海探测技术领域。该基于多方法融合的深水高精度导航定位技术,包括水声定位系统、惯性导航系统、地图匹配定位系统和多传感器数据融合定位系统,对水声定位系统、惯性导航系统、地图匹配定位系统和多传感器数据融合定位系统进行连接融合,在使用前需要通过多普勒计程仪、压力传感器对惯性导航系统进行初步的修正,水声定位系统由基阵、换能器、水下应答器组成。通过多方法融合,使得水下导航可以克服深水环境的影响,提高了导航定位的可靠性,并且通过信息融合的方法实现高效、高精度、