
一种基于多方法融合的深水高精度导航定位技术.pdf

海昌****姐淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于多方法融合的深水高精度导航定位技术.pdf
本发明提供一种基于多方法融合的深水高精度导航定位技术,涉及深海探测技术领域。该基于多方法融合的深水高精度导航定位技术,包括水声定位系统、惯性导航系统、地图匹配定位系统和多传感器数据融合定位系统,对水声定位系统、惯性导航系统、地图匹配定位系统和多传感器数据融合定位系统进行连接融合,在使用前需要通过多普勒计程仪、压力传感器对惯性导航系统进行初步的修正,水声定位系统由基阵、换能器、水下应答器组成。通过多方法融合,使得水下导航可以克服深水环境的影响,提高了导航定位的可靠性,并且通过信息融合的方法实现高效、高精度、

基于多信标的深水机器人导航与同时定位方法研究.docx
基于多信标的深水机器人导航与同时定位方法研究基于多信标的深水机器人导航与同时定位方法研究摘要:本论文旨在研究深水机器人导航与同时定位方法,介绍了深水机器人的特点和应用场景。针对深水环境下无人机精确定位困难的问题,本论文提出了基于多信标的深水机器人定位方法,探讨了多信标定位的原理,提出了一种定位算法,并结合实验验证了该方法的可行性和准确性。1.深水机器人的特点深水机器人是一种能够在水下进行各种任务的机器人,具有以下特点:(1)适应深水环境:深水机器人能够适应深度在1000米以上的水下环境,进行多种类型的任务
一种高精度的组合导航定位方法.pdf
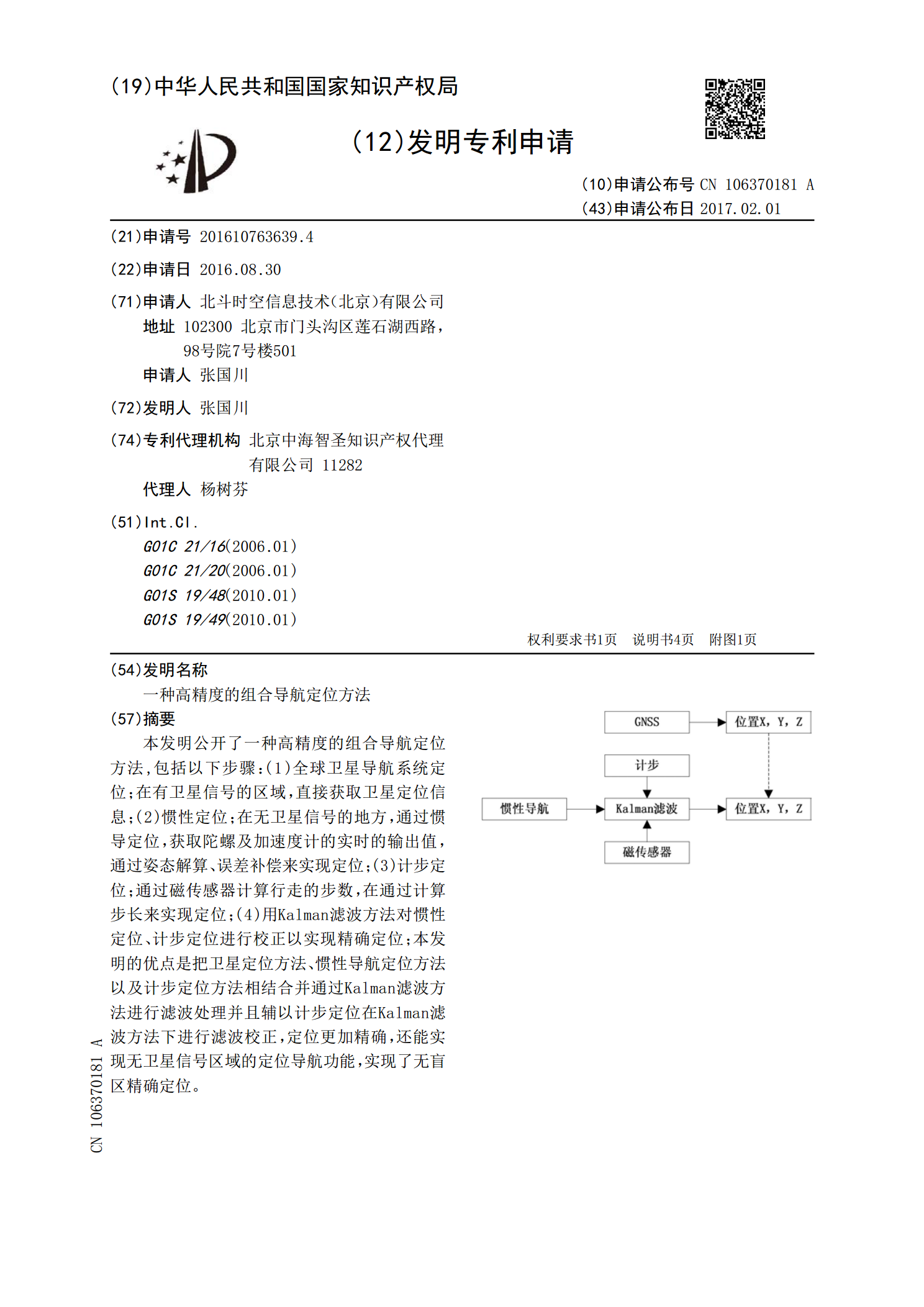
本发明公开了一种高精度的组合导航定位方法,包括以下步骤:(1)全球卫星导航系统定位;在有卫星信号的区域,直接获取卫星定位信息;(2)惯性定位;在无卫星信号的地方,通过惯导定位,获取陀螺及加速度计的实时的输出值,通过姿态解算、误差补偿来实现定位;(3)计步定位;通过磁传感器计算行走的步数,在通过计算步长来实现定位;(4)用Kalman滤波方法对惯性定位、计步定位进行校正以实现精确定位;本发明的优点是把卫星定位方法、惯性导航定位方法以及计步定位方法相结合并通过Kalman滤波方法进行滤波处理并且辅以计步定位在

基于联邦滤波的室内多传感器融合导航定位方法研究.docx
基于联邦滤波的室内多传感器融合导航定位方法研究随着现代社会对定位技术的需求越来越高,室内定位技术成为了行业研究的新热点。而多传感器融合导航定位方法,尤其是基于联邦滤波的方法,成为了解决室内定位难题的一种重要手段。本文将就此进行探讨。一、室内定位的难点与室外定位技术相比,室内定位技术面临更大的挑战。首先,室内空间相对较小,随机信号的噪声较大,这会造成探测精度和定位精度的下降。其次,室内环境非常复杂,涉及多种建筑材料、设备和人员活动等。这又会增加定位过程中误差的来源和干扰因素,因此对定位系统的鲁棒性和稳定性也

基于异构传感信息融合的导航定位方法.docx
基于异构传感信息融合的导航定位方法基于异构传感信息融合的导航定位方法摘要:随着人们对导航定位准确性要求的不断提高,传统的单一传感器定位已无法满足需求。为了提高导航定位的准确性和可靠性,本文基于异构传感信息融合提出了一种新的导航定位方法。该方法采用多种不同类型的传感器,如GPS、惯性测量单元(IMU)和视觉传感器,将它们的信息进行融合,以提高导航定位的准确性和可靠性。实验结果表明,该方法能够有效地提高导航定位的精度和稳定性,适用于各种应用场景。关键词:异构传感器;信息融合;导航定位;精度;稳定性1.引言导航