
一种车载高精度容错组合导航方法及系统.pdf

阳炎****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车载高精度容错组合导航方法及系统.pdf
本发明涉及一种车载高精度容错组合导航方法及系统。该方法包括:基于捷联惯导系统的姿态输出与里程计的路程增量输出、多普勒雷达的速度输出,分别设计地理坐标系下载车位置解算算法和速度解算算法;研究里程计与多普勒雷达的误差模型,分别建立前述位置解算和速度解算的误差模型;采用间接法滤波进行组合导航设计,以捷联惯导系统误差、里程计误差、多普勒雷达误差等作为系统状态,将捷联惯导输出的位置、速度与前述位置解算、速度解算获得的对应信息分别相减作为量测,采用卡尔曼滤波设计高精度容错组合导航的滤波算法。本发明能够实现车辆精确导航

一种车载组合导航系统.pdf
一种车载组合导航系统,包括:运算处理器以及与运算处理器分别连接的卫星定位模块、IMU模块、车轮传感器、气压高度表、磁航向偏角及车轮周长校准开关和三轴电子罗盘校准开关,所述IMU模块包括三轴加速度计、三轴陀螺仪、三轴电子罗盘。本发明的优越效果在于:能够有效的提高卫星的定位精度,同时,能够实现在无卫星定位情况下的惯性导航和在卫星有跳点的前提下,对其进行有效规避。

一种多源自适应容错联邦滤波组合导航系统及导航方法.pdf
本发明公开了一种多源自适应容错联邦滤波组合导航系统及导航方法,该系统包括捷联惯导系统、卫星导航系统、多普勒测速系统、天文导航系统,以及分别与上述系统进行信息连接的主滤波器和三个子滤波器;上述三个子滤波器均与捷联惯导系统进行信息连接,并且通过故障检测与隔离模块与主滤波器连接,所述捷联惯导系统通过状态传播器与故障检测与隔离模块连接,所述故障检测与隔离模块的输出结果经过信息共享因子计算模块后,将计算结果输入到主滤波器;所述主滤波器将融合后的信息输出,同时将融合结果同步于三个子滤波器和状态传播器。本发明所公开的系
一种车载导航系统的导航方法.pdf
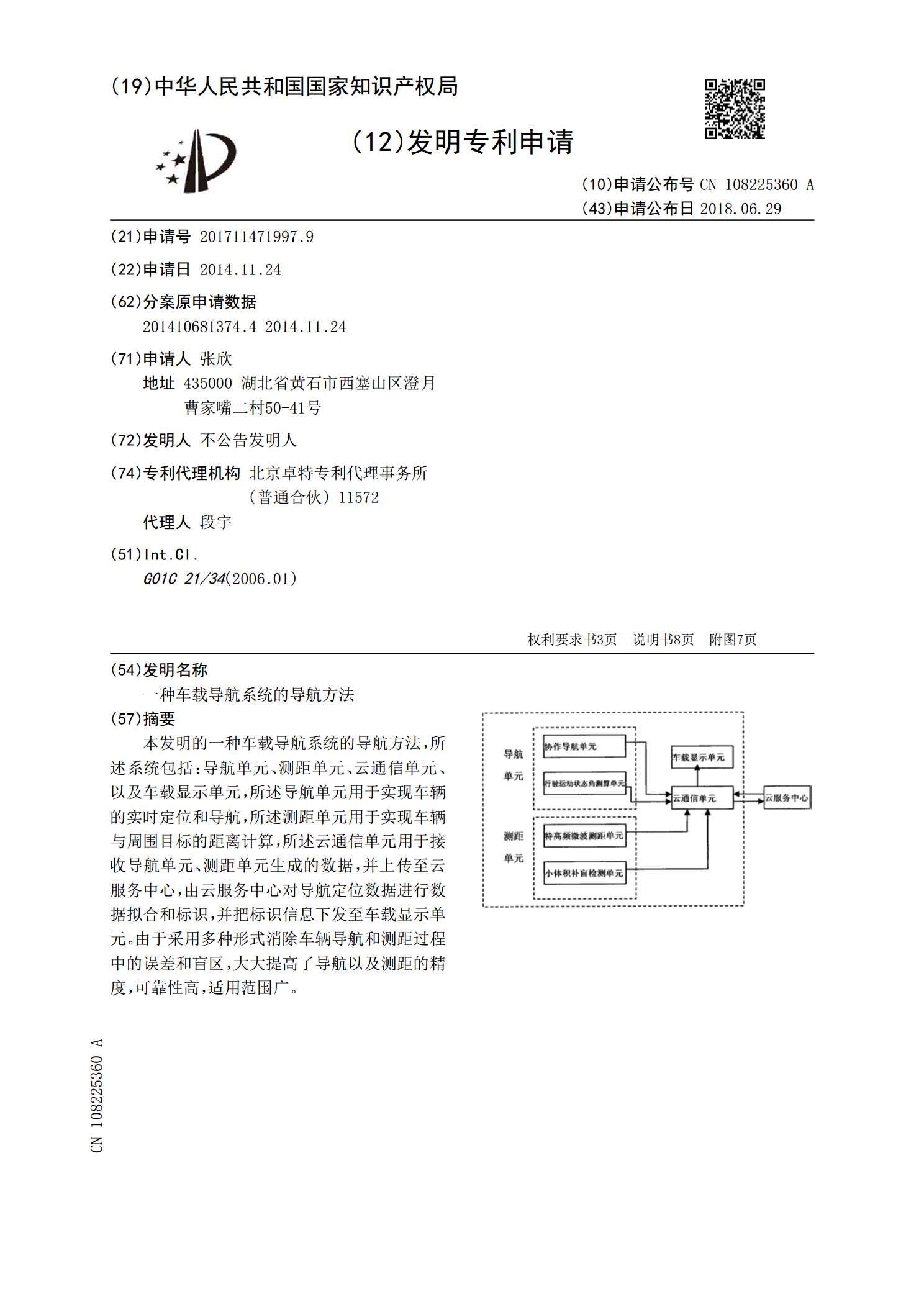
本发明的一种车载导航系统的导航方法,所述系统包括:导航单元、测距单元、云通信单元、以及车载显示单元,所述导航单元用于实现车辆的实时定位和导航,所述测距单元用于实现车辆与周围目标的距离计算,所述云通信单元用于接收导航单元、测距单元生成的数据,并上传至云服务中心,由云服务中心对导航定位数据进行数据拟合和标识,并把标识信息下发至车载显示单元。由于采用多种形式消除车辆导航和测距过程中的误差和盲区,大大提高了导航以及测距的精度,可靠性高,适用范围广。
一种高精度的组合导航定位方法.pdf
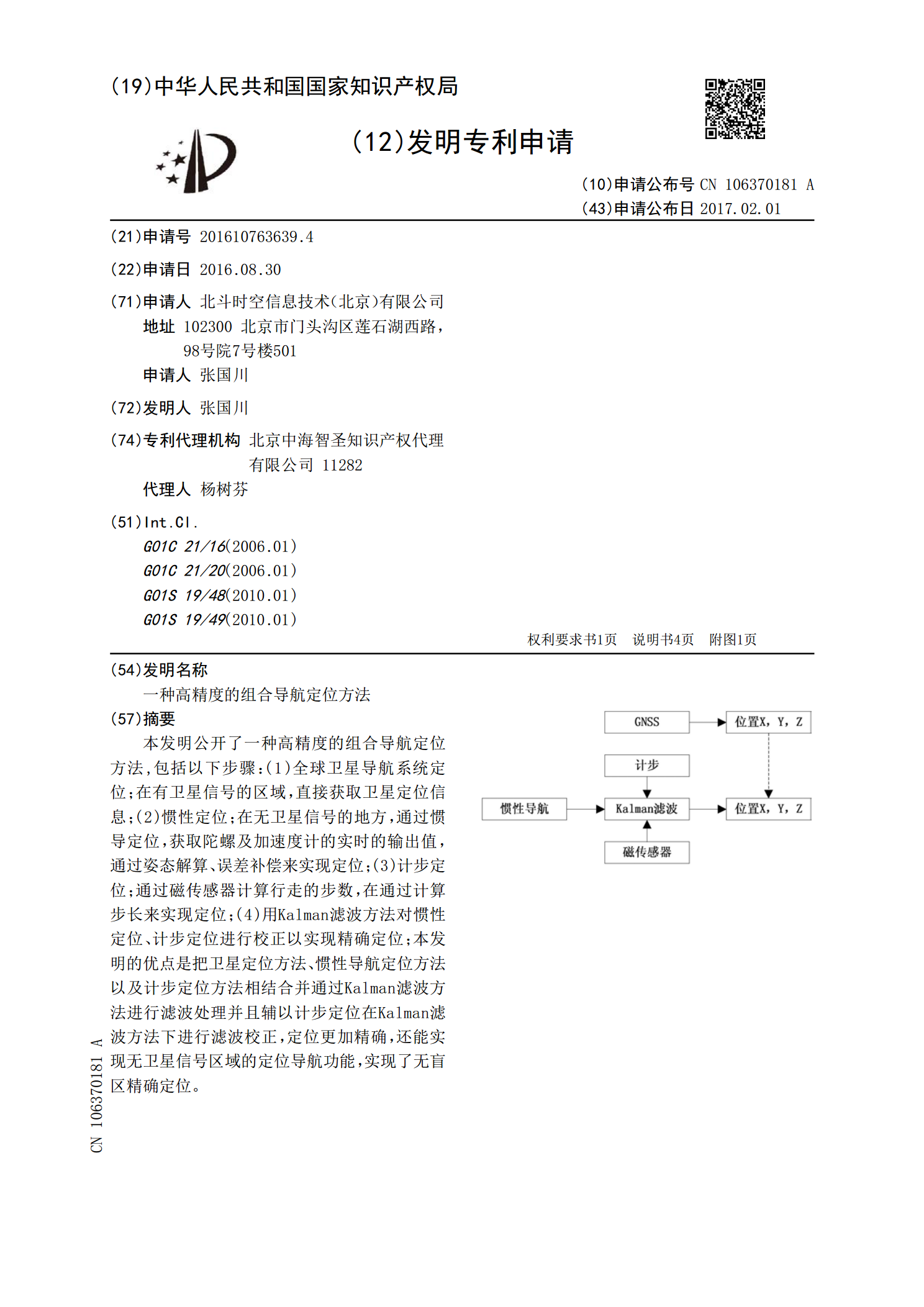
本发明公开了一种高精度的组合导航定位方法,包括以下步骤:(1)全球卫星导航系统定位;在有卫星信号的区域,直接获取卫星定位信息;(2)惯性定位;在无卫星信号的地方,通过惯导定位,获取陀螺及加速度计的实时的输出值,通过姿态解算、误差补偿来实现定位;(3)计步定位;通过磁传感器计算行走的步数,在通过计算步长来实现定位;(4)用Kalman滤波方法对惯性定位、计步定位进行校正以实现精确定位;本发明的优点是把卫星定位方法、惯性导航定位方法以及计步定位方法相结合并通过Kalman滤波方法进行滤波处理并且辅以计步定位在