
一种车载导航车辆组合定位装置及其组合定位方法.pdf

邻家****曼玉

1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车载导航车辆组合定位装置及其组合定位方法.pdf
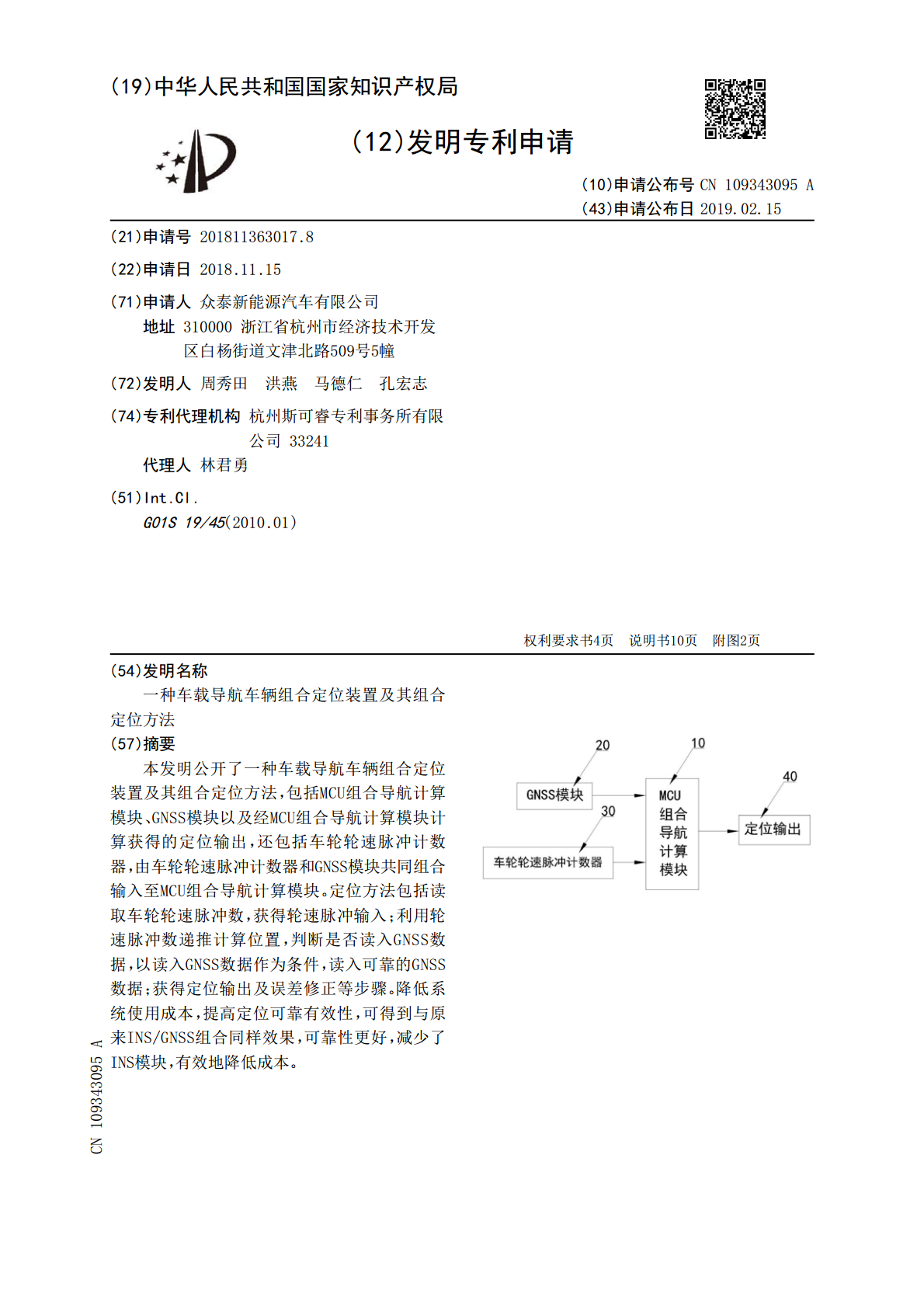
本发明公开了一种车载导航车辆组合定位装置及其组合定位方法,包括MCU组合导航计算模块、GNSS模块以及经MCU组合导航计算模块计算获得的定位输出,还包括车轮轮速脉冲计数器,由车轮轮速脉冲计数器和GNSS模块共同组合输入至MCU组合导航计算模块。定位方法包括读取车轮轮速脉冲数,获得轮速脉冲输入;利用轮速脉冲数递推计算位置,判断是否读入GNSS数据,以读入GNSS数据作为条件,读入可靠的GNSS数据;获得定位输出及误差修正等步骤。降低系统使用成本,提高定位可靠有效性,可得到与原来INS/GNSS组合同样效果,

车辆组合导航与定位技术.doc
.精选范本东南大学科技成果汇编东南大学科技处科技开发部联系电话:025-83792864联系人:仇向群目录1、基因调控信息集成数据库系统的研究与开发2、微型MEMS致冷器3、超宽带无线通信关键技术及其共存与兼容技术4、超宽带(UWB)无线传输技术研究与开发5、嵌入式旋转机械智能状态监控与故障诊断装置6、压缩机组远程工况监测和故障诊断系统7、机群状态远程监测与故障诊断系统软件8、低成本荫罩式PDP结构9、34英寸SMPDP显示器的彩色荧光粉喷涂技术10、34英寸大屏幕荫罩式PDP显示驱动系统及其驱动方法11

车载GPSDR组合导航定位系统的研究.docx
车载GPSDR组合导航定位系统的研究车载GPS/DR组合导航定位系统的研究摘要:随着全球定位系统(GPS)的发展和应用,车载导航系统日益普及。然而,GPS在城市峡谷、高层建筑物密集区和隧道等环境中存在较大的定位误差。为了克服这些问题,许多研究致力于将GPS与惯性测量单元(IMU)进行组合,以提高车载导航系统的定位精度。本文将介绍GPS和DR技术,分析GPS和DR组合导航系统的原理和关键技术,并讨论其在车载导航系统中的应用和前景。1.引言车载导航系统在提供驾驶员位置信息和行车路线的同时,还能提示交通信息,提

车载GPSDRMM组合导航定位算法研究应用.docx
车载GPSDRMM组合导航定位算法研究应用车载GPS/DR/MM组合导航定位算法研究应用随着人们出行需求的增加,车载导航系统的需求也越来越大。现代车载导航系统通常采用全球定位系统(GPS)进行定位。然而,GPS信号在城市峡谷、高层建筑和密集林区等环境下表现不佳。在这些情况下,惯性导航系统(INS)和地标匹配(MM)算法能够提供支持和纠正GPS定位的错误。将GPS、INS和MM组合起来以实现更精确的位置估计,是目前车载导航系统的一个研究热点。一、GPS定位原理由于GPS卫星距离地球较远,GPS接收机可以通过

一种船用组合导航定位装置.pdf
本发明公开了一种船用组合导航定位装置,涉及导航设备技术领域,包括组合导航定位本体,所述组合导航定位本体通过安装机构与船舶中控台相安装固定,所述安装机构包括:变压密闭组件,其具有能够容纳组合导航定位本体密封空间;压盖组件,在其运动行程上能够使得密封空间内的气压发生变化;气密监测组件,其能够显示变压密封空间内的气压变化状况,本发明通过将导航定位主体置于变压密闭组件的密封空间内,通过压盖组件使得密封空间内的气压发生变化,然后通过气密监测组件监测显示密封空间内的气压变化是否异常,便于相关人员在密封功能出现失效能够