
具有致动元件和用于手动操作致动元件的机构的类型的致动装置.pdf

琰琬****买买

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
具有致动元件和用于手动操作致动元件的机构的类型的致动装置.pdf
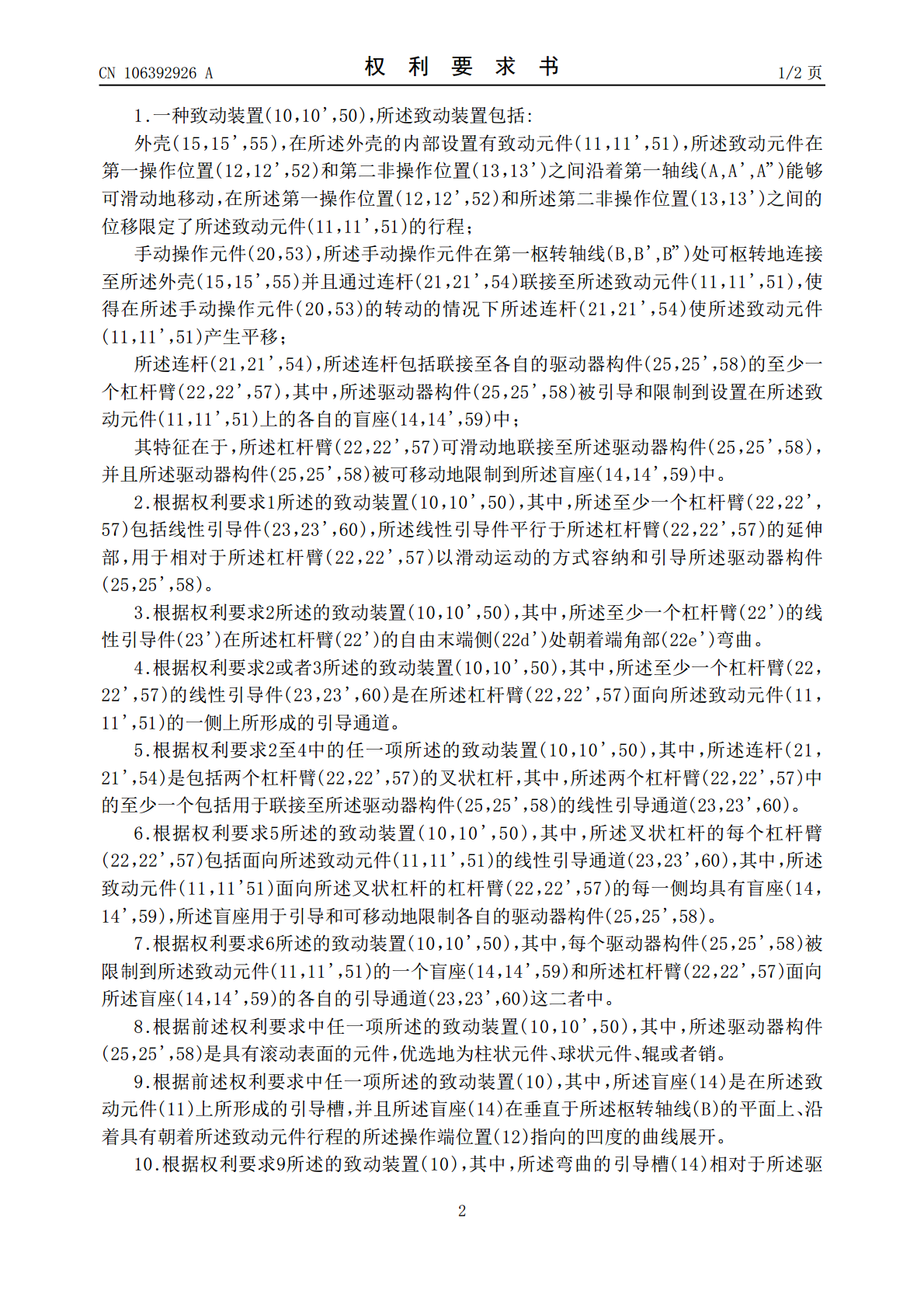
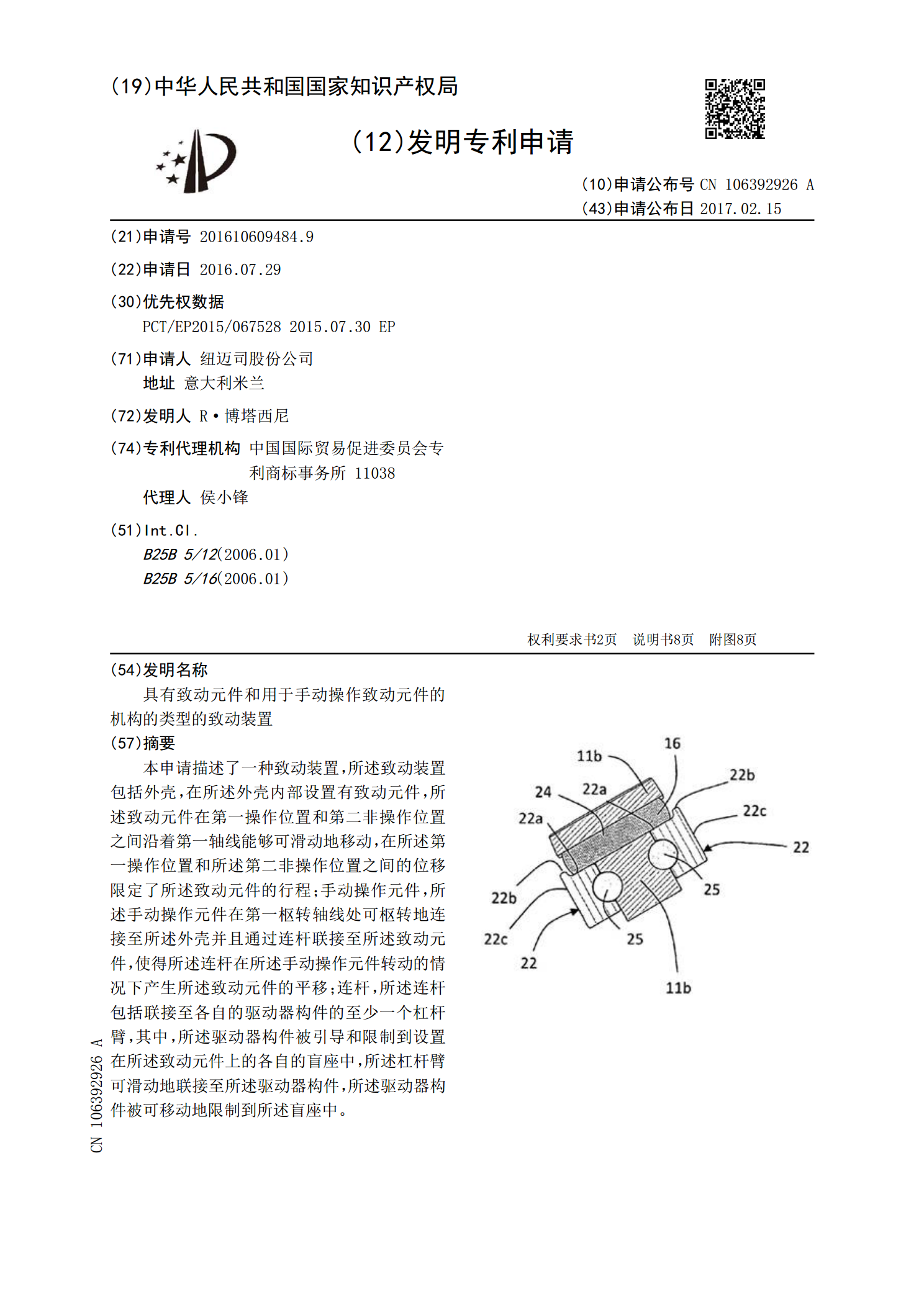
本申请描述了一种致动装置,所述致动装置包括外壳,在所述外壳内部设置有致动元件,所述致动元件在第一操作位置和第二非操作位置之间沿着第一轴线能够可滑动地移动,在所述第一操作位置和所述第二非操作位置之间的位移限定了所述致动元件的行程;手动操作元件,所述手动操作元件在第一枢转轴线处可枢转地连接至所述外壳并且通过连杆联接至所述致动元件,使得所述连杆在所述手动操作元件转动的情况下产生所述致动元件的平移;连杆,所述连杆包括联接至各自的驱动器构件的至少一个杠杆臂,其中,所述驱动器构件被引导和限制到设置在所述致动元件上的各
设置有致动元件和显示致动元件定位的传感部件的致动装置.pdf
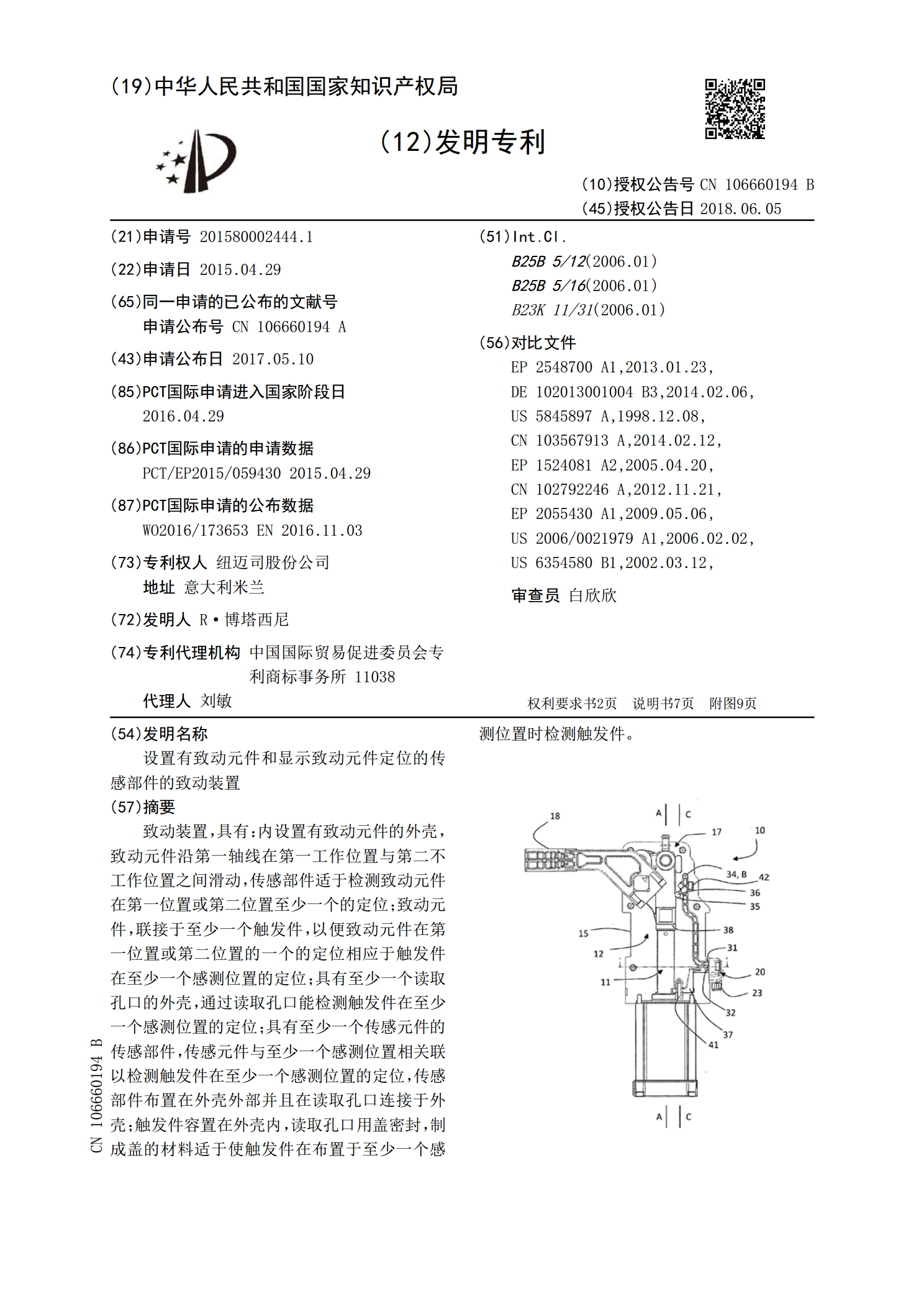
本发明涉及一种致动装置(10;50;80),其具有:外壳(15;55;85),外壳内设置有致动元件(11;51;81),致动元件(11;51;81)沿一条第一轴线(A,A',A”)在第一工作位置(12)与第二不工作位置(13)之间能滑动移动,传感部件(20)适于检测致动元件(11;51;81)在第一位置(12)或第二位置(13)的至少一个的定位;致动元件(11;51;81),其联接于至少一个触发件(31,32;52a,59;83,88),以便致动元件(11;51;81)在第一位置(12)或第二位置(13)
用于调节致动元件的致动器.pdf
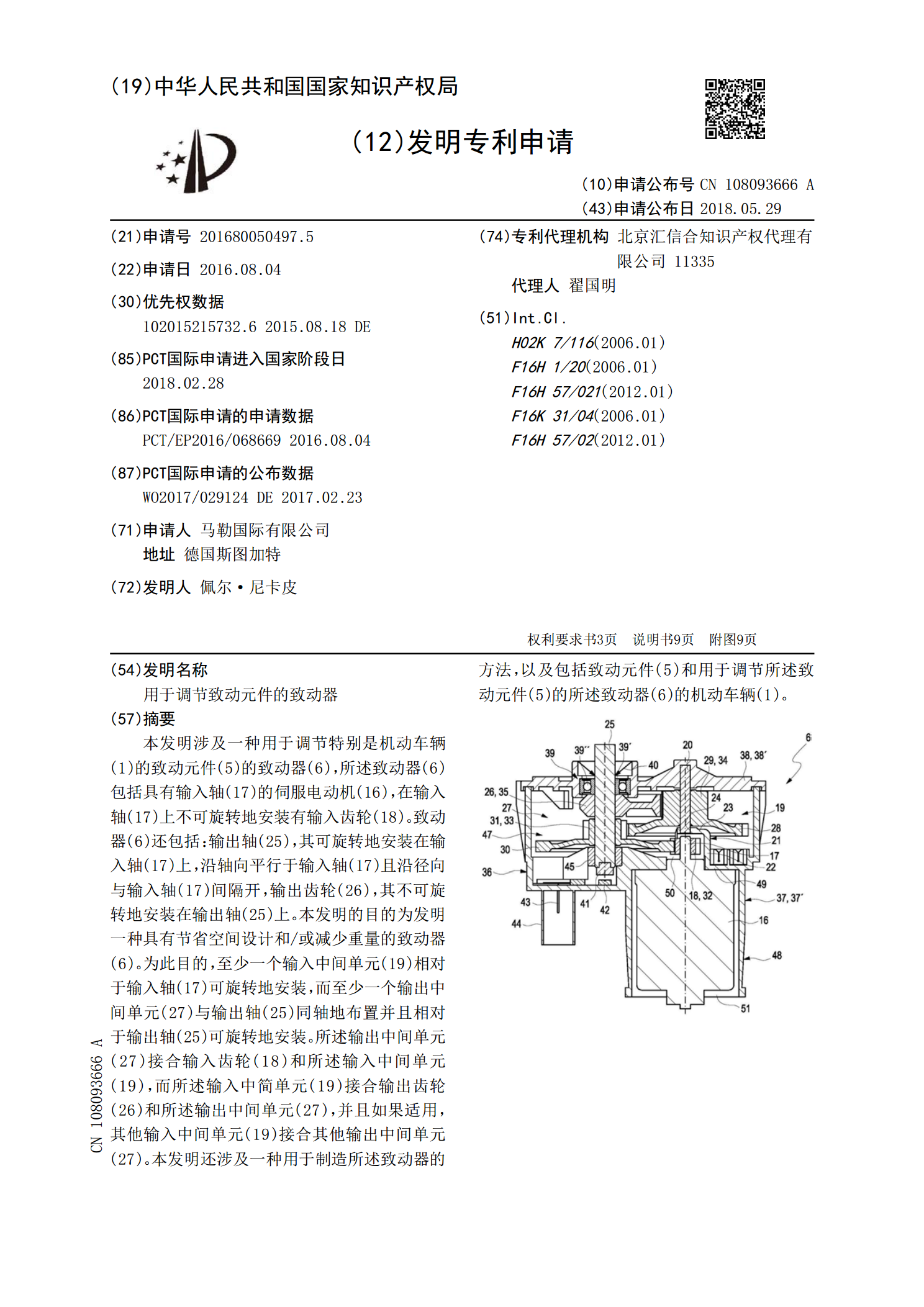
本发明涉及一种用于调节特别是机动车辆(1)的致动元件(5)的致动器(6),所述致动器(6)包括具有输入轴(17)的伺服电动机(16),在输入轴(17)上不可旋转地安装有输入齿轮(18)。致动器(6)还包括:输出轴(25),其可旋转地安装在输入轴(17)上,沿轴向平行于输入轴(17)且沿径向与输入轴(17)间隔开,输出齿轮(26),其不可旋转地安装在输出轴(25)上。本发明的目的为发明一种具有节省空间设计和/或减少重量的致动器(6)。为此目的,至少一个输入中间单元(19)相对于输入轴(17)可旋转地安装,而
致动器用弹性体组合物、致动器部件和致动器元件.pdf
本发明提供一种仅利用热能的量的变化就能够进行工作的致动器用弹性体组合物。本发明的仅利用热能的量的变化就能够进行工作的致动器中使用的弹性体组合物的熵弹性系数为3.0kPa/K以上、且包含具有至少1个25℃以下的玻璃化转变温度的聚合物、以及结晶成核剂。
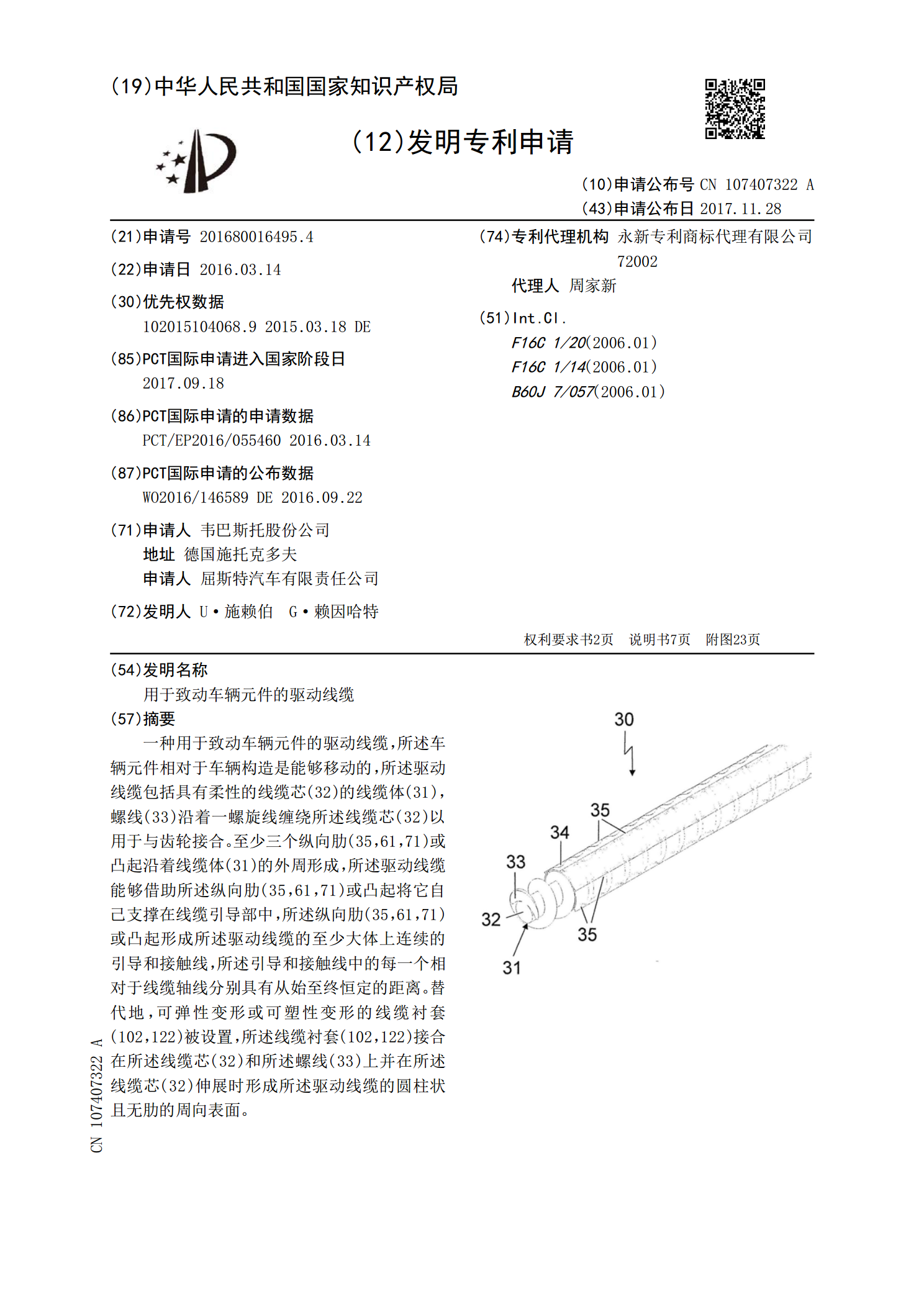
用于致动车辆元件的驱动线缆.pdf
一种用于致动车辆元件的驱动线缆,所述车辆元件相对于车辆构造是能够移动的,所述驱动线缆包括具有柔性的线缆芯(32)的线缆体(31),螺线(33)沿着一螺旋线缠绕所述线缆芯(32)以用于与齿轮接合。至少三个纵向肋(35,61,71)或凸起沿着线缆体(31)的外周形成,所述驱动线缆能够借助所述纵向肋(35,61,71)或凸起将它自己支撑在线缆引导部中,所述纵向肋(35,61,71)或凸起形成所述驱动线缆的至少大体上连续的引导和接触线,所述引导和接触线中的每一个相对于线缆轴线分别具有从始至终恒定的距离。替代地,可