
车辆盲区可视化方法、装置、终端、系统及车辆.pdf

星星****眨眼


1/10
2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆盲区可视化方法、装置、终端、系统及车辆.pdf
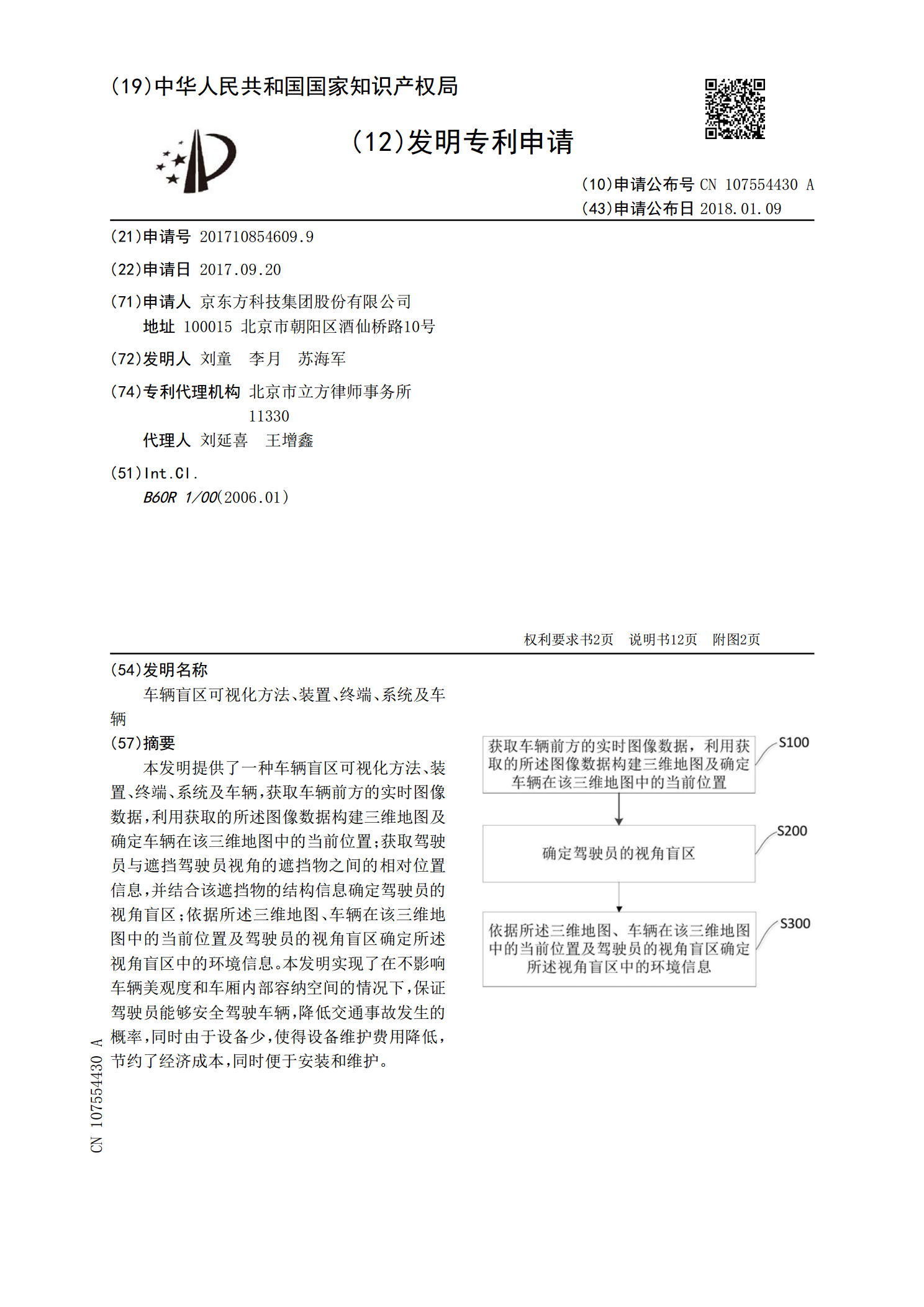
本发明提供了一种车辆盲区可视化方法、装置、终端、系统及车辆,获取车辆前方的实时图像数据,利用获取的所述图像数据构建三维地图及确定车辆在该三维地图中的当前位置;获取驾驶员与遮挡驾驶员视角的遮挡物之间的相对位置信息,并结合该遮挡物的结构信息确定驾驶员的视角盲区;依据所述三维地图、车辆在该三维地图中的当前位置及驾驶员的视角盲区确定所述视角盲区中的环境信息。本发明实现了在不影响车辆美观度和车厢内部容纳空间的情况下,保证驾驶员能够安全驾驶车辆,降低交通事故发生的概率,同时由于设备少,使得设备维护费用降低,节约了经济
基于行驶车辆的盲区检测方法、装置、终端及车辆.pdf
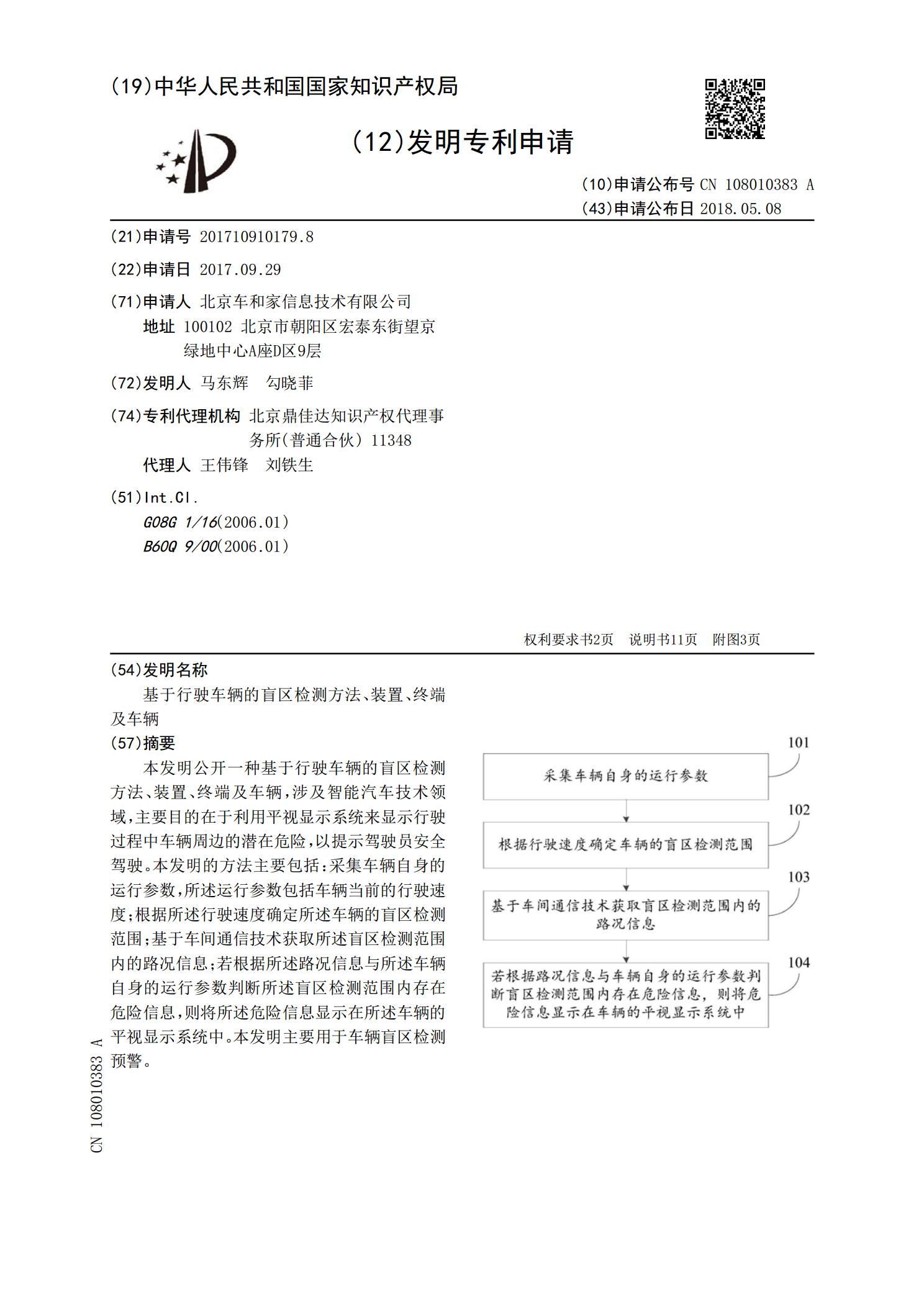
本发明公开一种基于行驶车辆的盲区检测方法、装置、终端及车辆,涉及智能汽车技术领域,主要目的在于利用平视显示系统来显示行驶过程中车辆周边的潜在危险,以提示驾驶员安全驾驶。本发明的方法主要包括:采集车辆自身的运行参数,所述运行参数包括车辆当前的行驶速度;根据所述行驶速度确定所述车辆的盲区检测范围;基于车间通信技术获取所述盲区检测范围内的路况信息;若根据所述路况信息与所述车辆自身的运行参数判断所述盲区检测范围内存在危险信息,则将所述危险信息显示在所述车辆的平视显示系统中。本发明主要用于车辆盲区检测预警。

车辆盲区监测装置、方法及系统.pdf
本发明提供一种车辆盲区监测装置、方法及系统,所述车辆盲区监测装置包括:安装在车辆后部的超声波探测装置以及控制芯片,所述超声波探测装置用于发送超声波信号与接收回波信号,对车辆盲区进行测距;所述控制芯片连接所述超声波探测装置,用于接收所述回波信号,对所述回波信号进行分析得到进入车辆盲区的目标的运动轨迹;根据所述运动轨迹预测判断目标是否进入告警区域,并在进入时发送报警电信号。本发明实现了对车辆盲区的监测覆盖,并对盲区的监测目标进行提前预判,从而给驾驶员提供足够的反应时间,减少碰撞的风险,提高车辆行驶安全性。
车辆盲区处理方法、装置、车载终端及存储介质.pdf
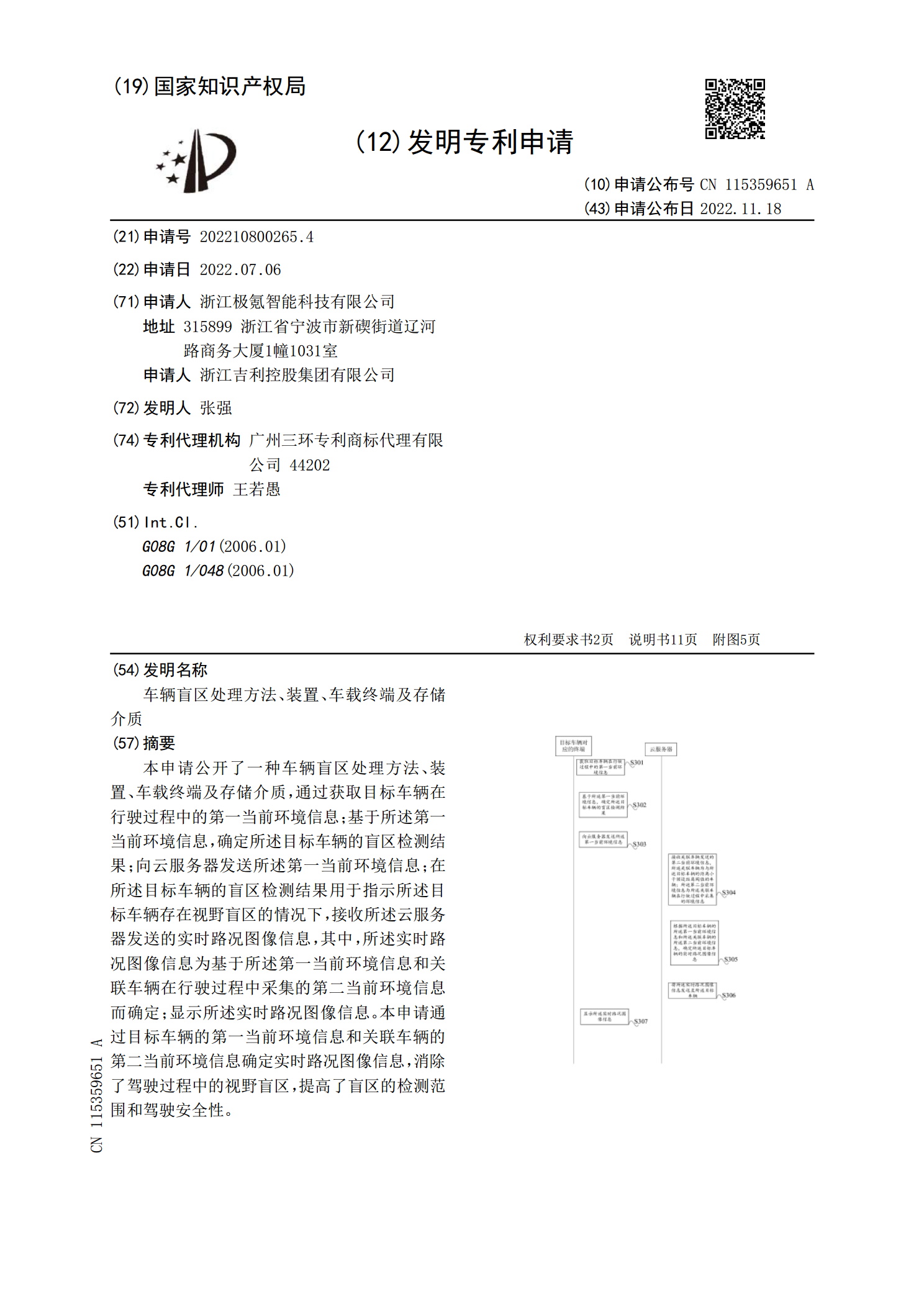
本申请公开了一种车辆盲区处理方法、装置、车载终端及存储介质,通过获取目标车辆在行驶过程中的第一当前环境信息;基于所述第一当前环境信息,确定所述目标车辆的盲区检测结果;向云服务器发送所述第一当前环境信息;在所述目标车辆的盲区检测结果用于指示所述目标车辆存在视野盲区的情况下,接收所述云服务器发送的实时路况图像信息,其中,所述实时路况图像信息为基于所述第一当前环境信息和关联车辆在行驶过程中采集的第二当前环境信息而确定;显示所述实时路况图像信息。本申请通过目标车辆的第一当前环境信息和关联车辆的第二当前环境信息确定
车辆的盲区辅助系统评价方法、装置、车辆及存储介质.pdf
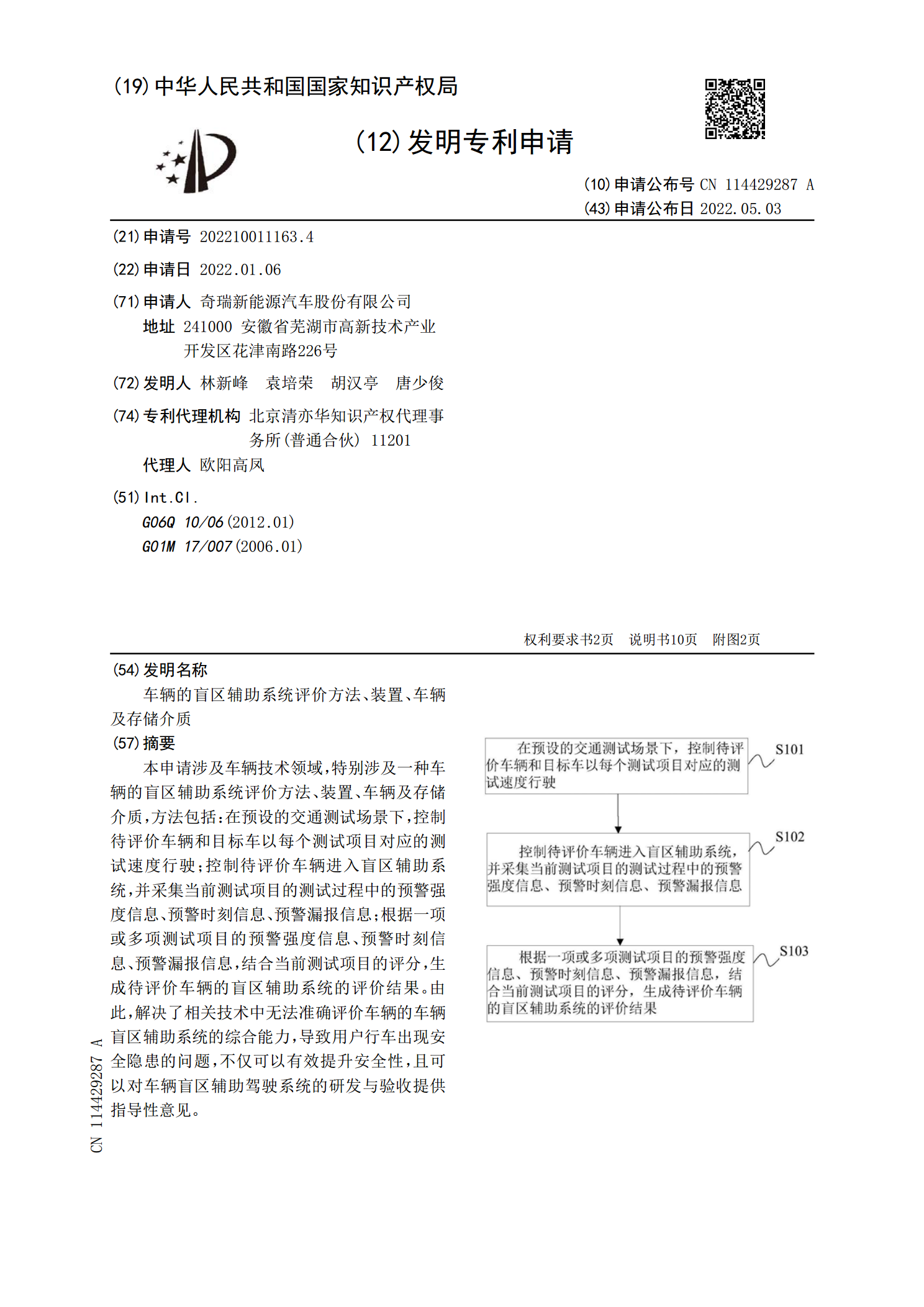
本申请涉及车辆技术领域,特别涉及一种车辆的盲区辅助系统评价方法、装置、车辆及存储介质,方法包括:在预设的交通测试场景下,控制待评价车辆和目标车以每个测试项目对应的测试速度行驶;控制待评价车辆进入盲区辅助系统,并采集当前测试项目的测试过程中的预警强度信息、预警时刻信息、预警漏报信息;根据一项或多项测试项目的预警强度信息、预警时刻信息、预警漏报信息,结合当前测试项目的评分,生成待评价车辆的盲区辅助系统的评价结果。由此,解决了相关技术中无法准确评价车辆的车辆盲区辅助系统的综合能力,导致用户行车出现安全隐患的问题