
基于行驶车辆的盲区检测方法、装置、终端及车辆.pdf

骊蓉****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于行驶车辆的盲区检测方法、装置、终端及车辆.pdf
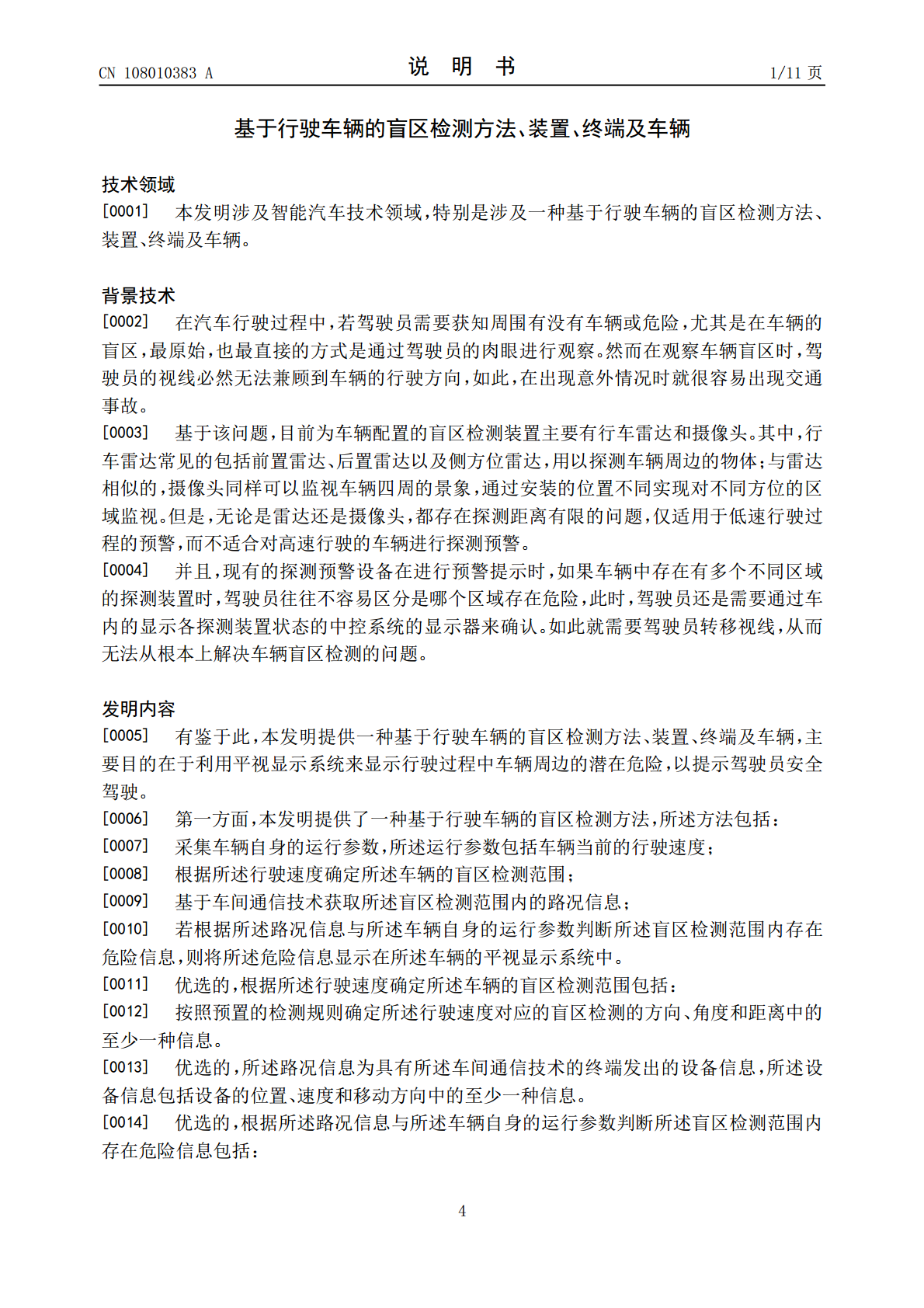
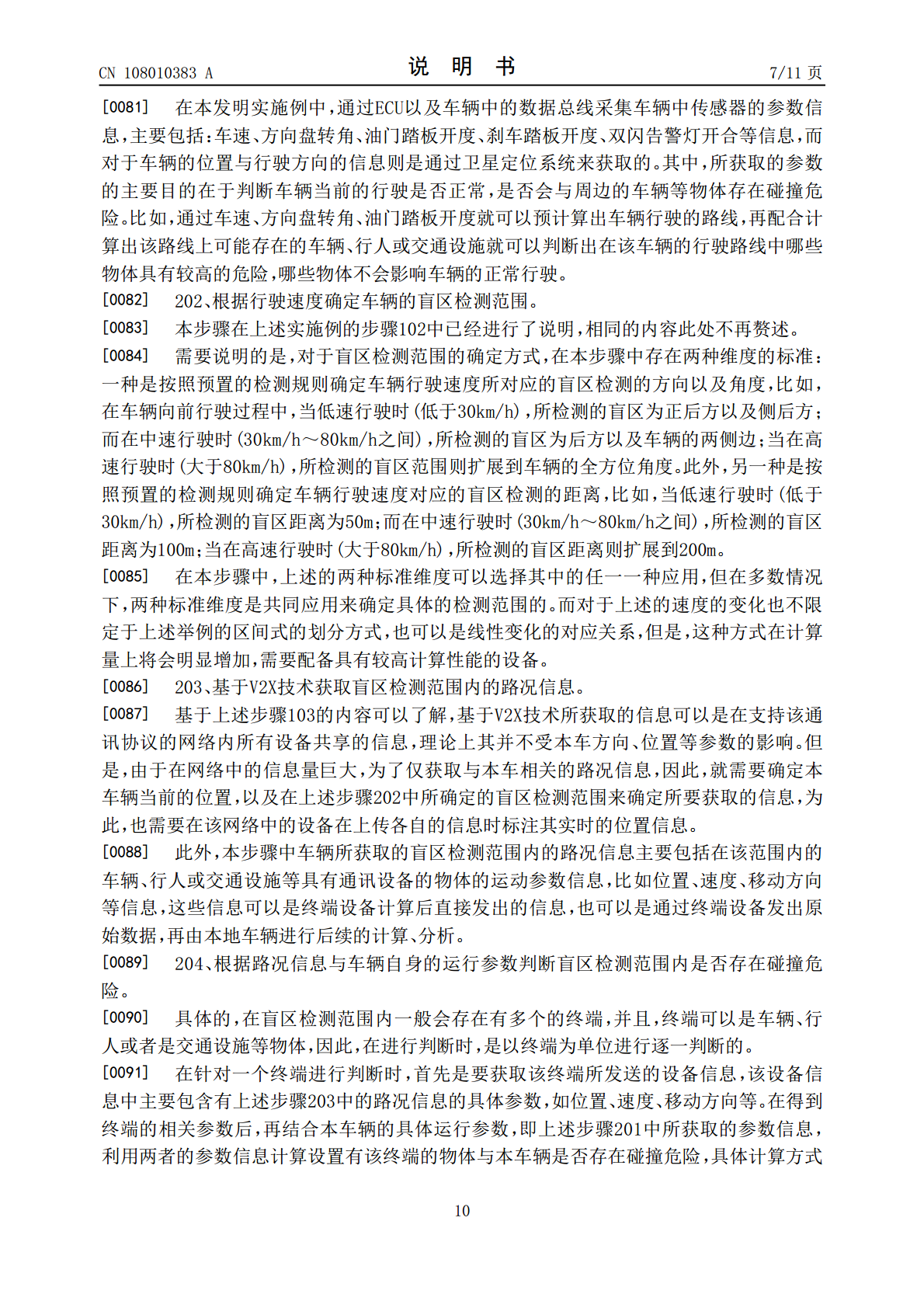
本发明公开一种基于行驶车辆的盲区检测方法、装置、终端及车辆,涉及智能汽车技术领域,主要目的在于利用平视显示系统来显示行驶过程中车辆周边的潜在危险,以提示驾驶员安全驾驶。本发明的方法主要包括:采集车辆自身的运行参数,所述运行参数包括车辆当前的行驶速度;根据所述行驶速度确定所述车辆的盲区检测范围;基于车间通信技术获取所述盲区检测范围内的路况信息;若根据所述路况信息与所述车辆自身的运行参数判断所述盲区检测范围内存在危险信息,则将所述危险信息显示在所述车辆的平视显示系统中。本发明主要用于车辆盲区检测预警。

车辆的盲区检测装置及方法.pdf
本发明公开了一种车辆的盲区检测装置及方法,该装置具有布置于车辆的车身两侧的声音采集装置、用于对采集到的声音信号进行预处理的声音信号预处理模块、用于根据经预处理的声音信号以及声音采集装置的安装位置来计算并建立模拟声场的声场模块、和用于将模拟声场和声音特征数据库进行匹配运算,从而得到车辆周围的待检测对象的类别和方位信息的声源定位模块。根据本发明的车辆的盲区检测装置及方法,其通过声音探测技术来实现车辆盲区检测,能够对周围各个方向和范围的目标进行有效探测,因而能够使得盲区检测的范围覆盖车辆的所有盲区,并且不易受外
车辆行驶盲区校准方法、装置、设备及存储介质.pdf
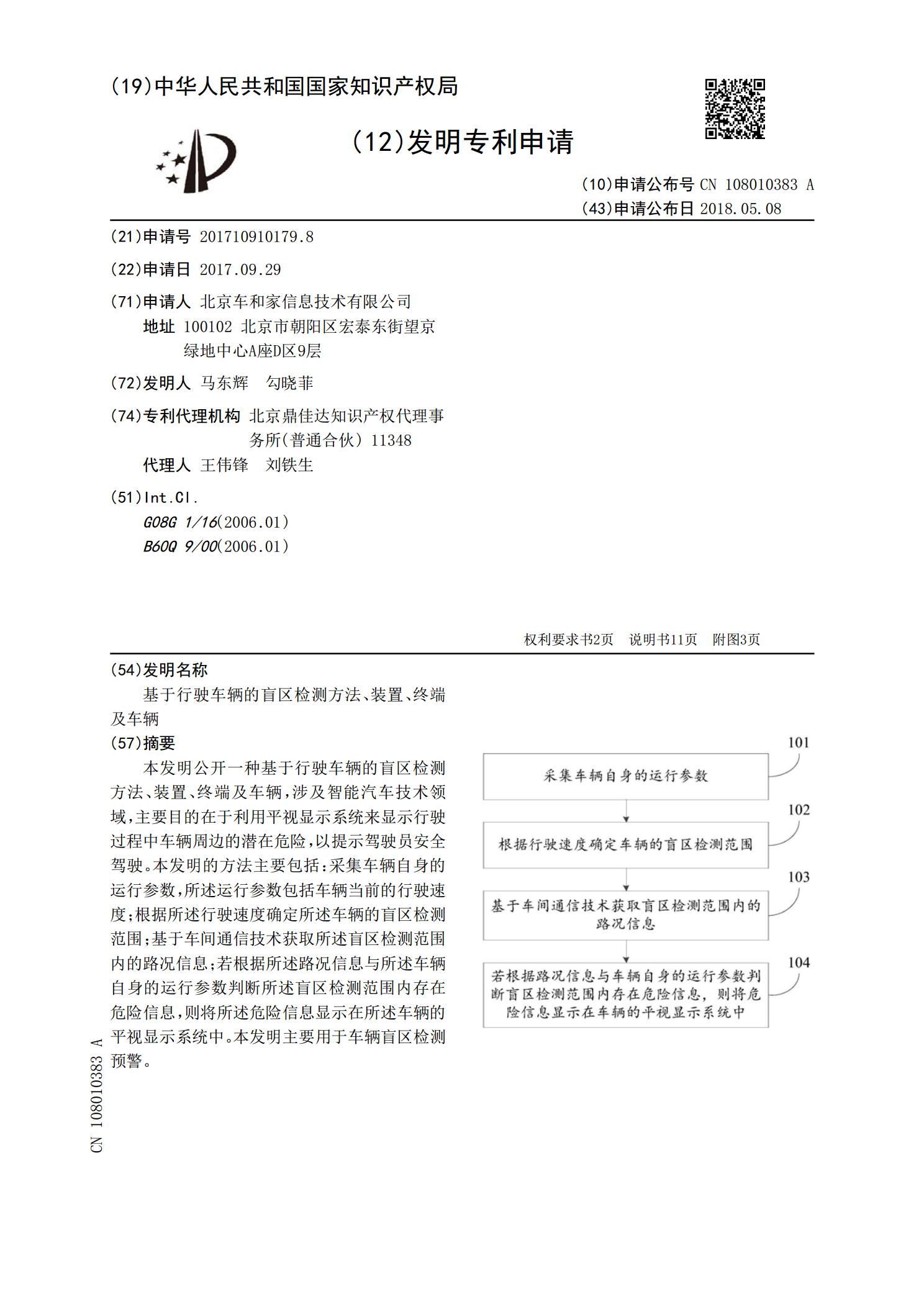
本发明公开了一种车辆行驶盲区校准方法、装置、设备及存储介质,所述方法通过在检测到当前车辆进入到信号盲区时,将全球定位系统GPS数据、惯性导航系统INS数据和车身传感器数据进行时间同步;在时间同步后,基于预设车辆动力学模型和INS建立高程、车速和道路坡度相关的状态方程,并获得对应的状态估计函数;根据交互多模型Kalman滤波器和状态估计函数确定车辆最终估计参数,根据车辆最终估计参数对当前导航结果进行修正,避免了长时间处于盲区下惯性导航系统出现信号漂移的问题,保证了导航估计结果的估计精度和时间精度,导航修正数
车辆盲区可视化方法、装置、终端、系统及车辆.pdf
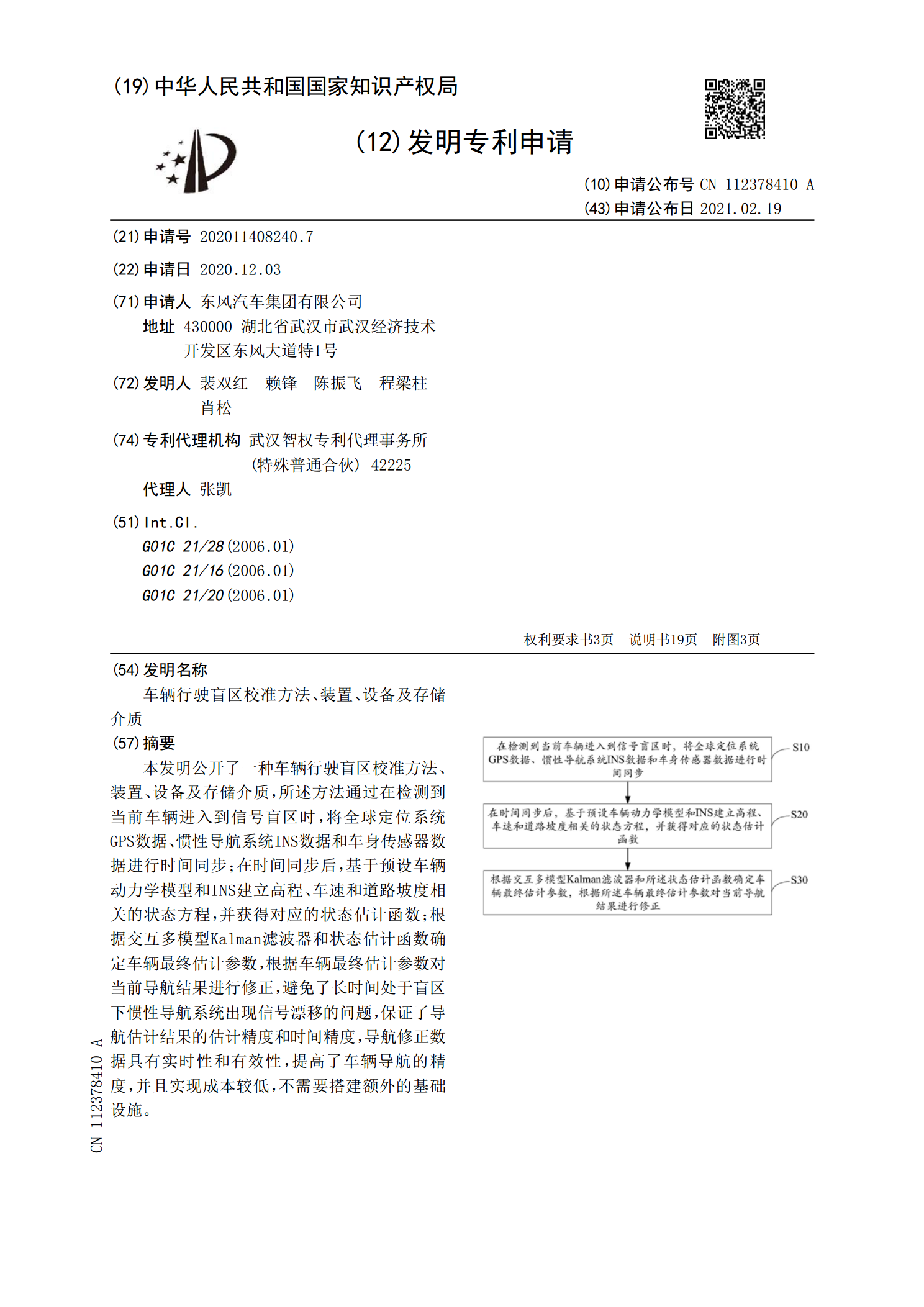
本发明提供了一种车辆盲区可视化方法、装置、终端、系统及车辆,获取车辆前方的实时图像数据,利用获取的所述图像数据构建三维地图及确定车辆在该三维地图中的当前位置;获取驾驶员与遮挡驾驶员视角的遮挡物之间的相对位置信息,并结合该遮挡物的结构信息确定驾驶员的视角盲区;依据所述三维地图、车辆在该三维地图中的当前位置及驾驶员的视角盲区确定所述视角盲区中的环境信息。本发明实现了在不影响车辆美观度和车厢内部容纳空间的情况下,保证驾驶员能够安全驾驶车辆,降低交通事故发生的概率,同时由于设备少,使得设备维护费用降低,节约了经济
车辆盲区检测处理方法、装置、车载终端和存储介质.pdf
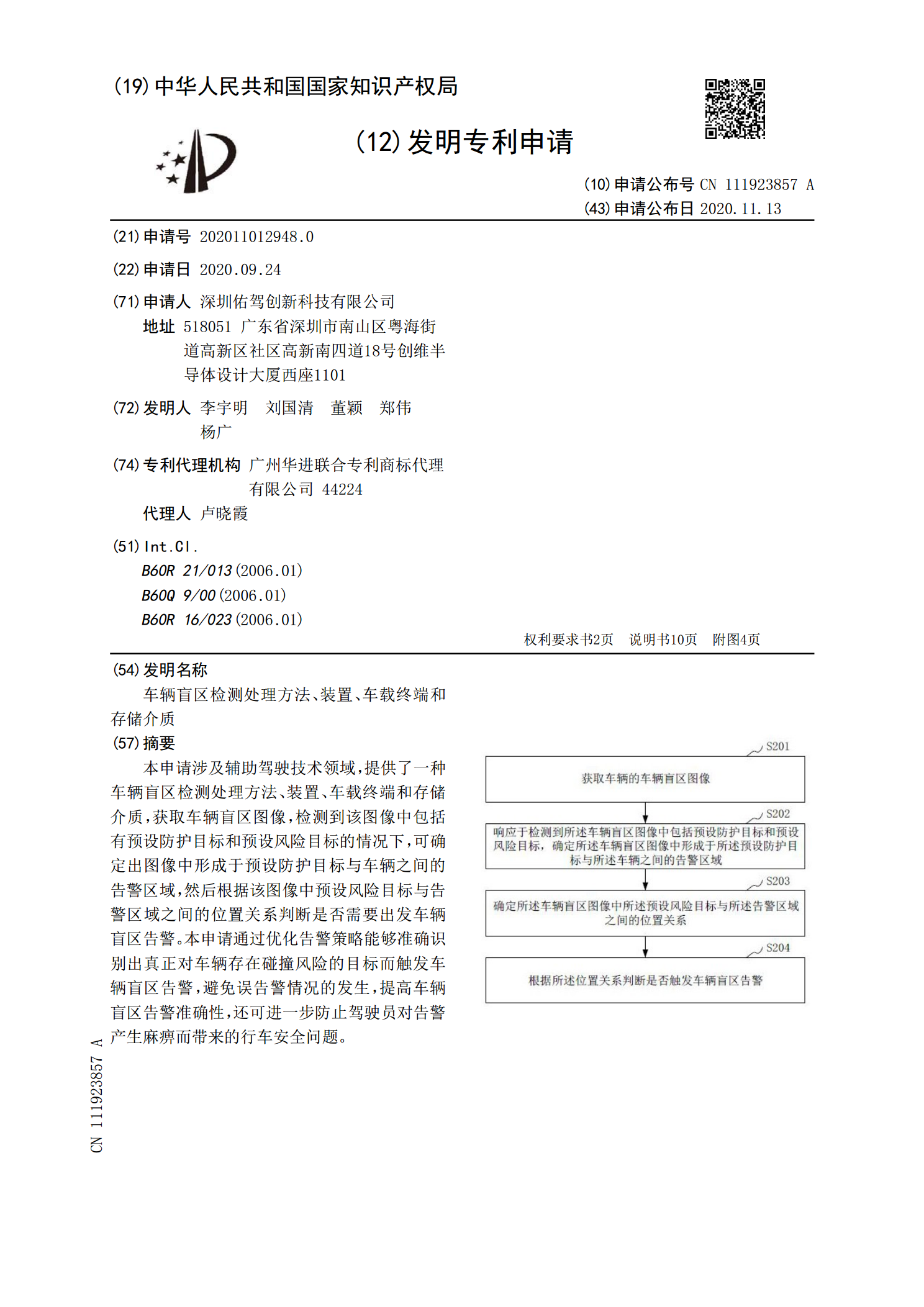
本申请涉及辅助驾驶技术领域,提供了一种车辆盲区检测处理方法、装置、车载终端和存储介质,获取车辆盲区图像,检测到该图像中包括有预设防护目标和预设风险目标的情况下,可确定出图像中形成于预设防护目标与车辆之间的告警区域,然后根据该图像中预设风险目标与告警区域之间的位置关系判断是否需要出发车辆盲区告警。本申请通过优化告警策略能够准确识别出真正对车辆存在碰撞风险的目标而触发车辆盲区告警,避免误告警情况的发生,提高车辆盲区告警准确性,还可进一步防止驾驶员对告警产生麻痹而带来的行车安全问题。