
一种障碍物轮廓的确定方法及装置、车辆、存储介质.pdf

猫巷****雪凝

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种障碍物轮廓的确定方法及装置、车辆、存储介质.pdf
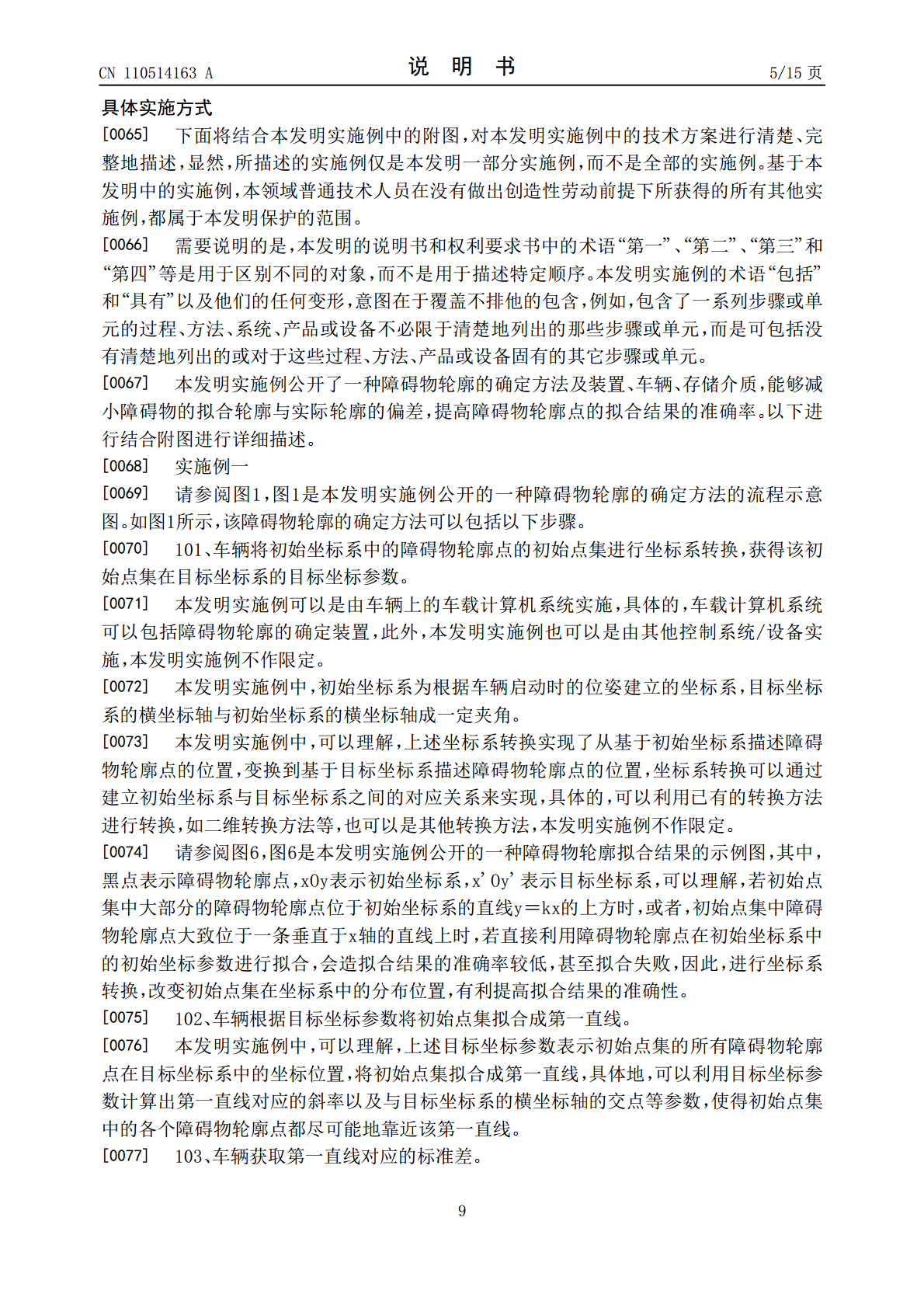
一种障碍物轮廓的确定方法及装置、车辆、存储介质,该方法包括:将初始坐标系中的障碍物轮廓点的初始点集进行坐标系转换,获得初始点集在目标坐标系的目标坐标参数;其中,初始坐标系为根据车辆启动时的位姿建立的坐标系,目标坐标系的横坐标轴与初始坐标系的横坐标轴成一定夹角;根据目标坐标参数将初始点集拟合成第一直线;获取第一直线对应的标准差;根据目标坐标参数将初始点集拟合成第二直线和第三直线;获取第二直线对应的标准差与第三直线对应的标准差的总和,根据第一直线对应的标准差与总和的差值,确定出障碍物轮廓。实施本发明实施例,能

障碍物确定方法、装置、设备以及存储介质.pdf
本发明公开了一种障碍物确定方法、装置、设备以及存储介质。该方法包括:确定目标车辆所处场景的候选障碍物相对于目标车辆的相对位置;根据所述相对位置,以及所述目标车辆所处场景的实际车道线或虚拟车道线,从目标车辆所处场景的候选障碍物中确定目标障碍物。通过上述技术方案,节省了自动驾驶系统的计算资源,可以更快更准确的筛选出感兴趣的目标障碍物,从而增加自动驾驶的安全性。
位置确定方法、装置、车辆及存储介质.pdf
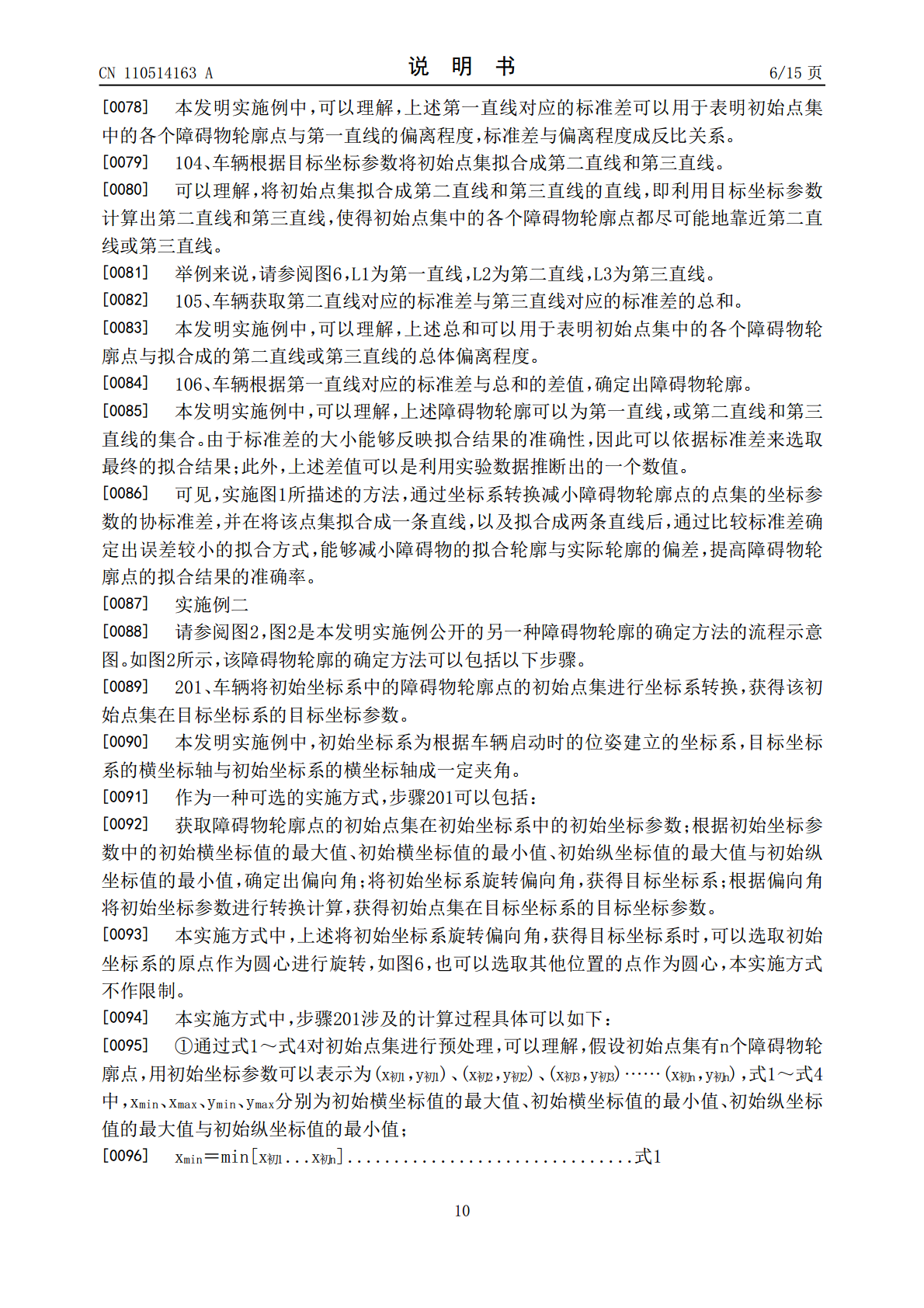
本申请公开了一种位置确定方法、装置、车辆及存储介质,该方法包括:获取执行模块的实时位置对应的测量参数;测量参数为电阻位置检测模块对执行模块的实时位置进行检测得到;根据测量参数、堵转点参数、总测量参数以及总位置参数确定执行模块的实时位置参数;其中,堵转点参数为执行模块运行至堵转点位置时对应的测量参数;总位置参数为总测量参数对应的位置参数;通过堵转点参数在位置确定方法中的设置,能够减少机械回转误差对电阻位置检测模块精度的影响,从而在降低成本的同时提高电阻位置检测模块的检测精度,扩展了电阻位置检测模块的使用场景
一种基于车辆的障碍物定位方法、装置、车辆及存储介质.pdf
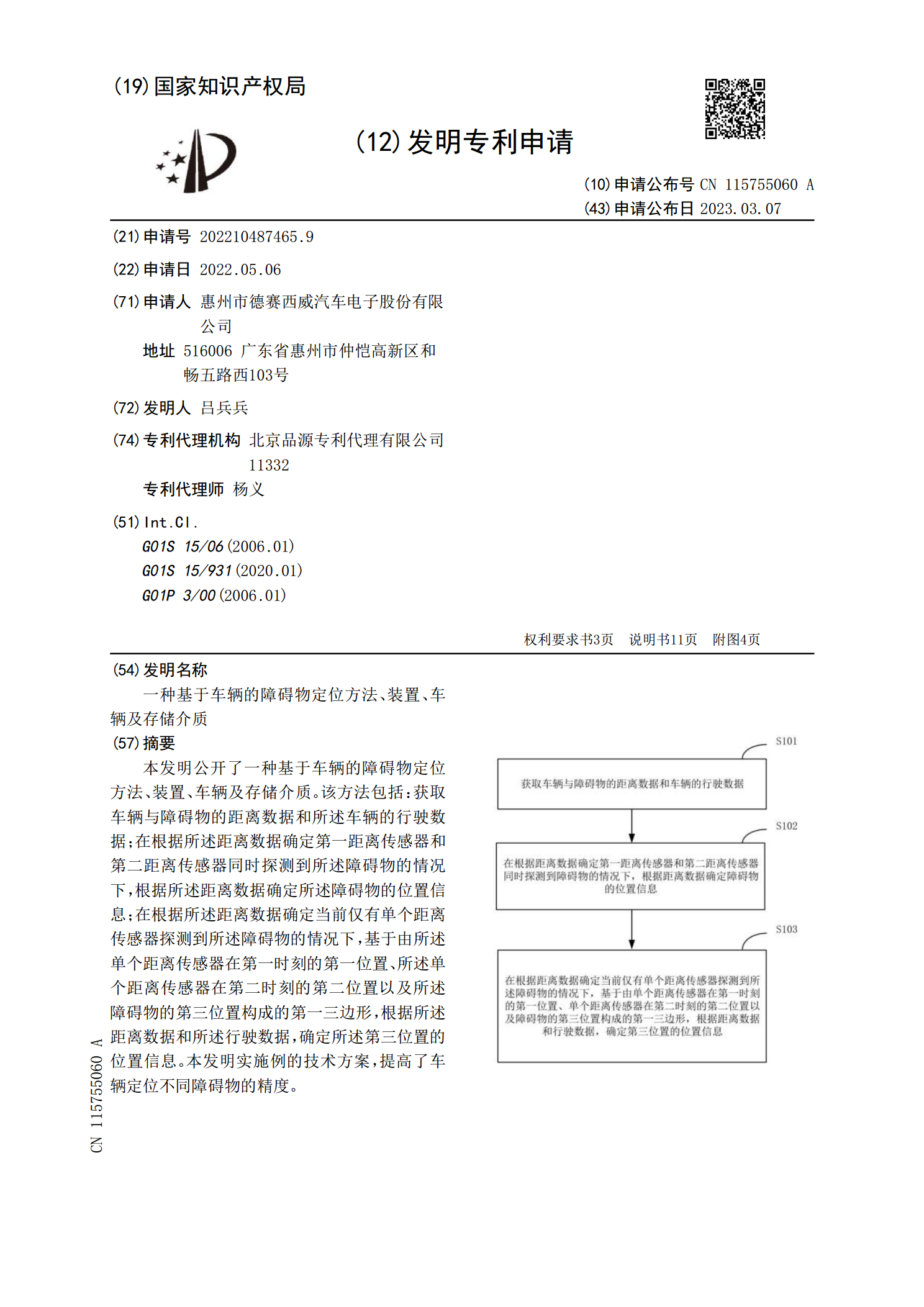
本发明公开了一种基于车辆的障碍物定位方法、装置、车辆及存储介质。该方法包括:获取车辆与障碍物的距离数据和所述车辆的行驶数据;在根据所述距离数据确定第一距离传感器和第二距离传感器同时探测到所述障碍物的情况下,根据所述距离数据确定所述障碍物的位置信息;在根据所述距离数据确定当前仅有单个距离传感器探测到所述障碍物的情况下,基于由所述单个距离传感器在第一时刻的第一位置、所述单个距离传感器在第二时刻的第二位置以及所述障碍物的第三位置构成的第一三边形,根据所述距离数据和所述行驶数据,确定所述第三位置的位置信息。本发明

一种车辆动力性能确定方法、装置及存储介质.pdf
本发明公开了一种车辆动力性能确定方法、装置及存储介质,其中,方法部分包括:获取不同车型的车辆在不同油门开度下的加速性能数据,根据加速性能数据生成车辆的加速特征向量集合,以表征车型在高维空间下加速性能,将不同车型在高维空间下加速性能转化至低维空间,以获得不同车型在低维空间下加速性能,对不同车型在低维空间下加速性能进行聚类分类,获得不同车型的动力性能评估结果;本发明中,考虑了各油门下的加速度性能,对采集的高维空间加速性能转化为低维空间,同时保留高维空间下的加速特征结构特点,以便于后续根据需求对低维空间下加速性