
基于车路协同的点云目标检测和盲区目标检测方法及系统.pdf

悠柔****找我

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于车路协同的点云目标检测和盲区目标检测方法及系统.pdf
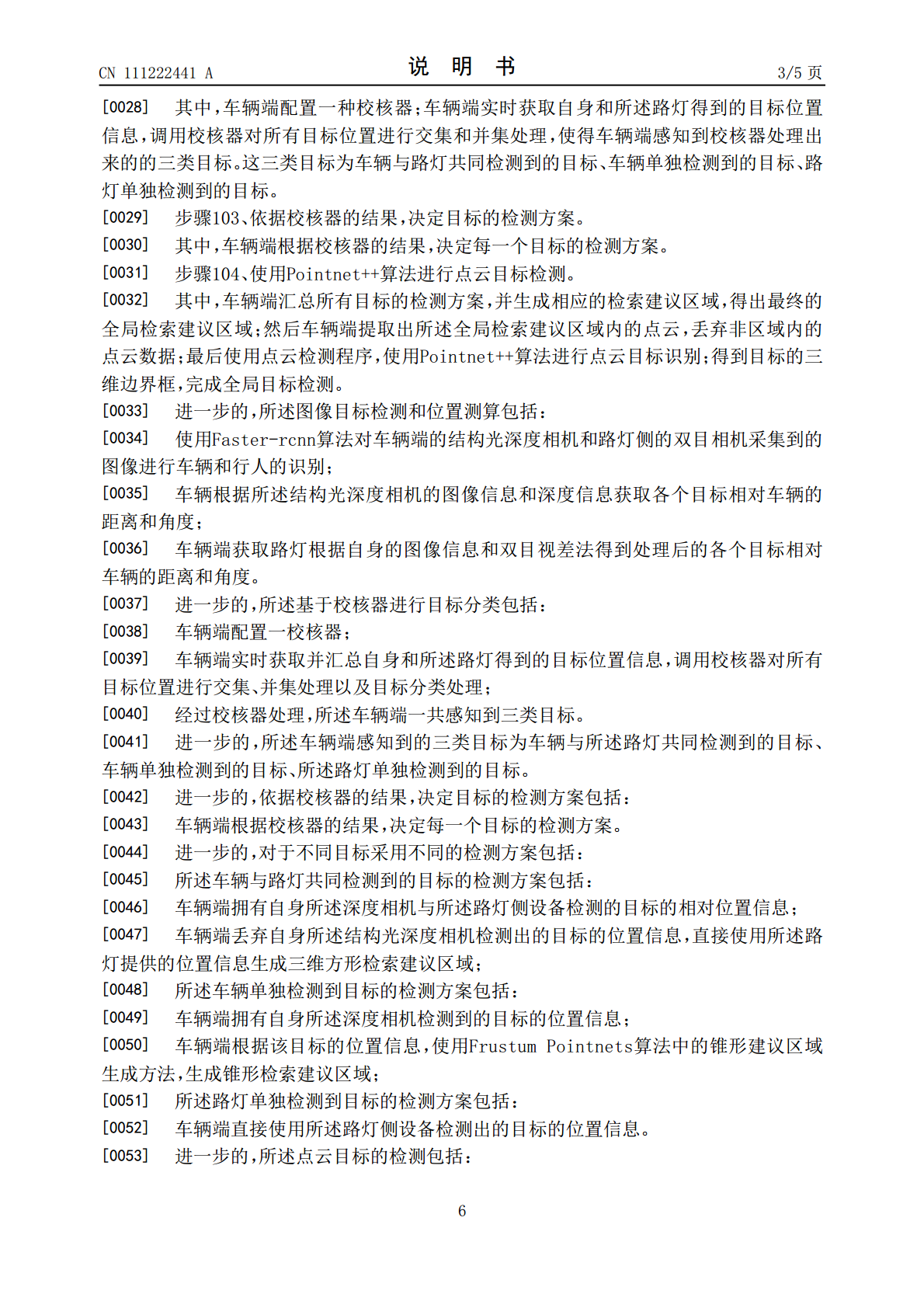
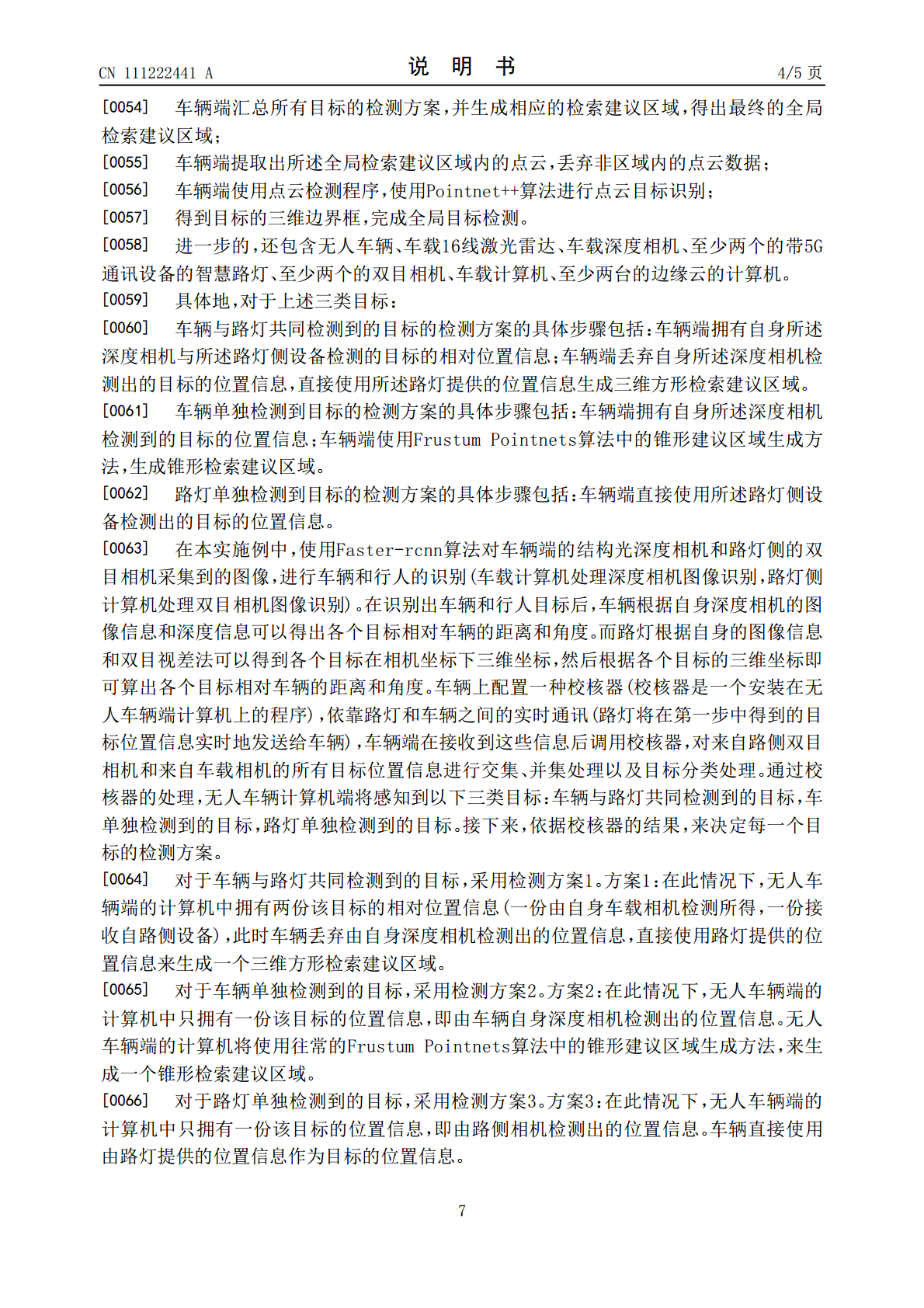
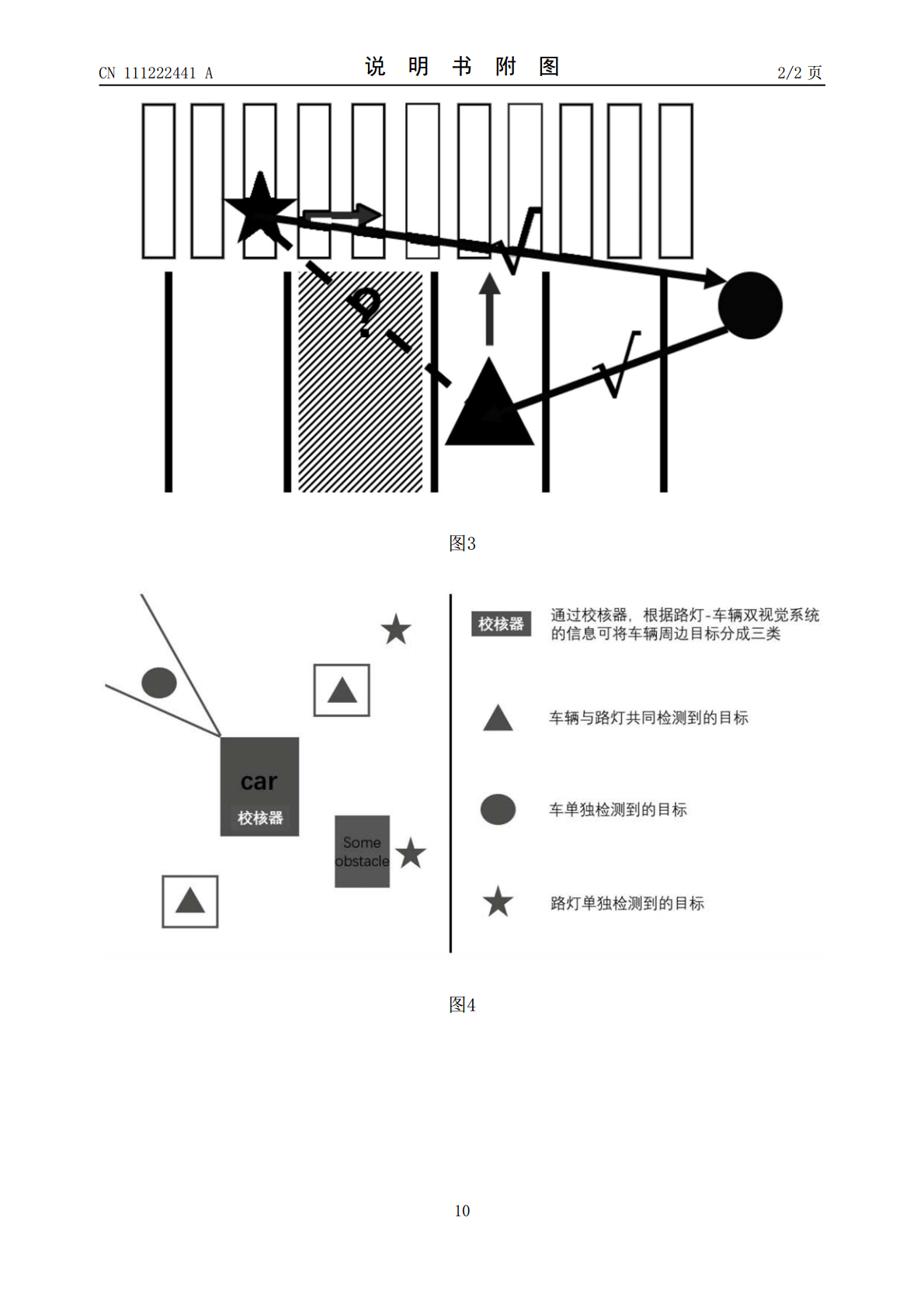
本发明提供了一种基于车路协同的点云目标检测和盲区目标检测方法及系统,包括:图像目标检测和位置测算;基于校核器进行目标分类;依据校核器的目标分类结果,决定目标的检测方案;使用Pointnet++算法进行点云目标检测。通过巧妙地改变相机的位置和提出方形检索建议区域,应用到车路协同感知的新场景中去,达到了生成更优点云检索建议区域和盲区内目标检测的效果,保证了路灯故障下单车智能的独立性不受任何影响。因为路灯故障时,所有目标都被校核器判断为仅被车检测到的目标,该类目标将被决策为继续沿用搭载在车辆上的原Frustum

一种基于车路协同的无盲区感知方法和系统.pdf
本申请公开了一种基于车路协同的无盲区感知方法和系统,该方法包括:获取车载端点云数据、车载端视觉数据和路侧端点云数据;根据车载端点云数据和车载端视觉数据,确定车载端目标检测结果;利用预设配准方法,对车载端点云数据和路侧端点云数据进行配准,确定全局定位信息;根据全局定位信息,获取路侧端目标检测结果;根据车载端目标检测结果和路侧端目标检测结果得到全局目标检测结果。本发明能够融合路侧检测结果和车载端目标检测结果,实现当前场景全局无盲区感知,为自动驾驶车辆提供准确、丰富的环境感知信息,克服了自动驾驶车辆感知范围存在
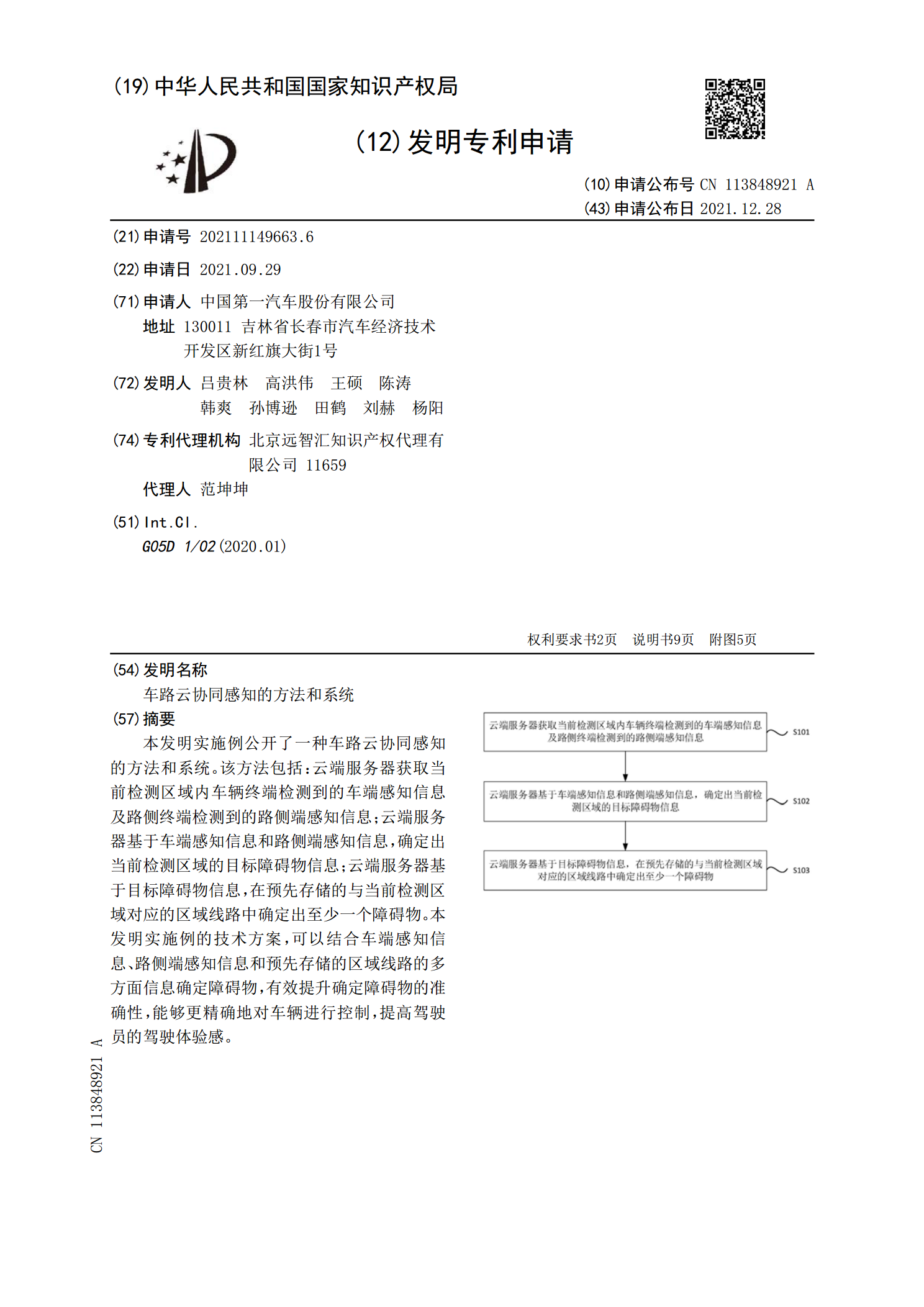
车路云协同感知的方法和系统.pdf
本发明实施例公开了一种车路云协同感知的方法和系统。该方法包括:云端服务器获取当前检测区域内车辆终端检测到的车端感知信息及路侧终端检测到的路侧端感知信息;云端服务器基于车端感知信息和路侧端感知信息,确定出当前检测区域的目标障碍物信息;云端服务器基于目标障碍物信息,在预先存储的与当前检测区域对应的区域线路中确定出至少一个障碍物。本发明实施例的技术方案,可以结合车端感知信息、路侧端感知信息和预先存储的区域线路的多方面信息确定障碍物,有效提升确定障碍物的准确性,能够更精确地对车辆进行控制,提高驾驶员的驾驶体验感。
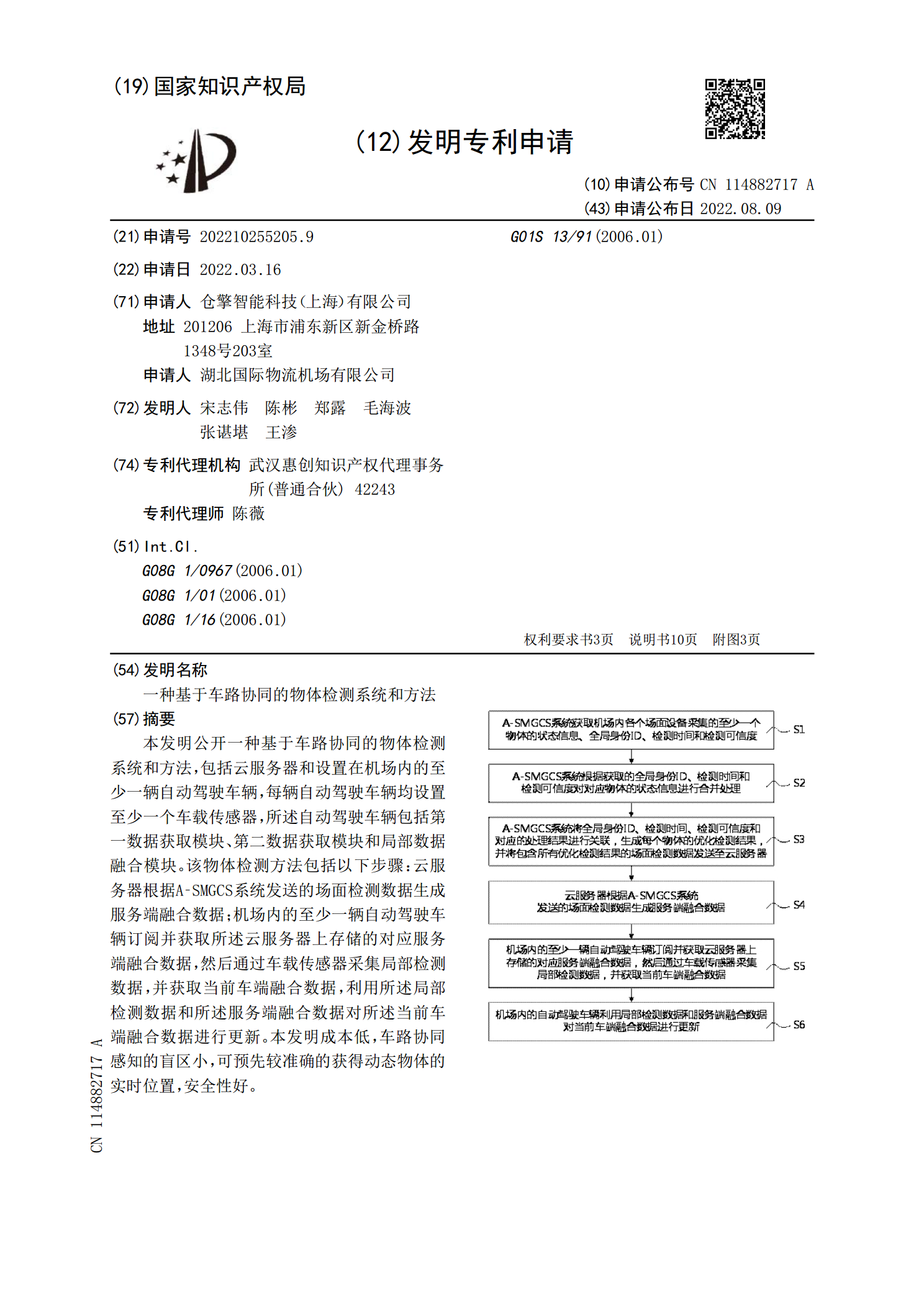
一种基于车路协同的物体检测系统和方法.pdf
本发明公开一种基于车路协同的物体检测系统和方法,包括云服务器和设置在机场内的至少一辆自动驾驶车辆,每辆自动驾驶车辆均设置至少一个车载传感器,所述自动驾驶车辆包括第一数据获取模块、第二数据获取模块和局部数据融合模块。该物体检测方法包括以下步骤:云服务器根据A‑SMGCS系统发送的场面检测数据生成服务端融合数据;机场内的至少一辆自动驾驶车辆订阅并获取所述云服务器上存储的对应服务端融合数据,然后通过车载传感器采集局部检测数据,并获取当前车端融合数据,利用所述局部检测数据和所述服务端融合数据对所述当前车端融合数据
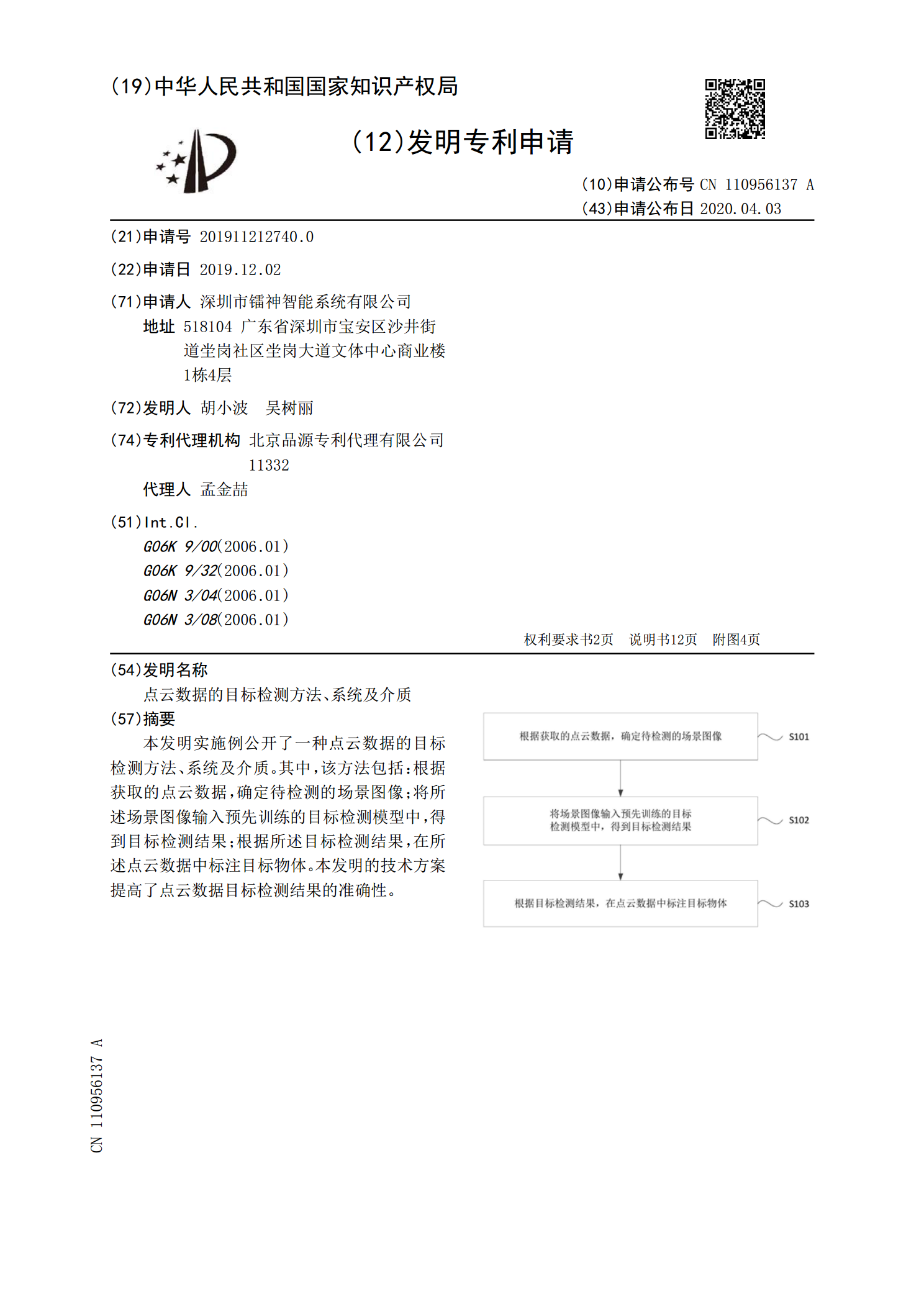
点云数据的目标检测方法、系统及介质.pdf
本发明实施例公开了一种点云数据的目标检测方法、系统及介质。其中,该方法包括:根据获取的点云数据,确定待检测的场景图像;将所述场景图像输入预先训练的目标检测模型中,得到目标检测结果;根据所述目标检测结果,在所述点云数据中标注目标物体。本发明的技术方案提高了点云数据目标检测结果的准确性。