
点云数据的目标检测方法、系统及介质.pdf

英瑞****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
点云数据的目标检测方法、系统及介质.pdf
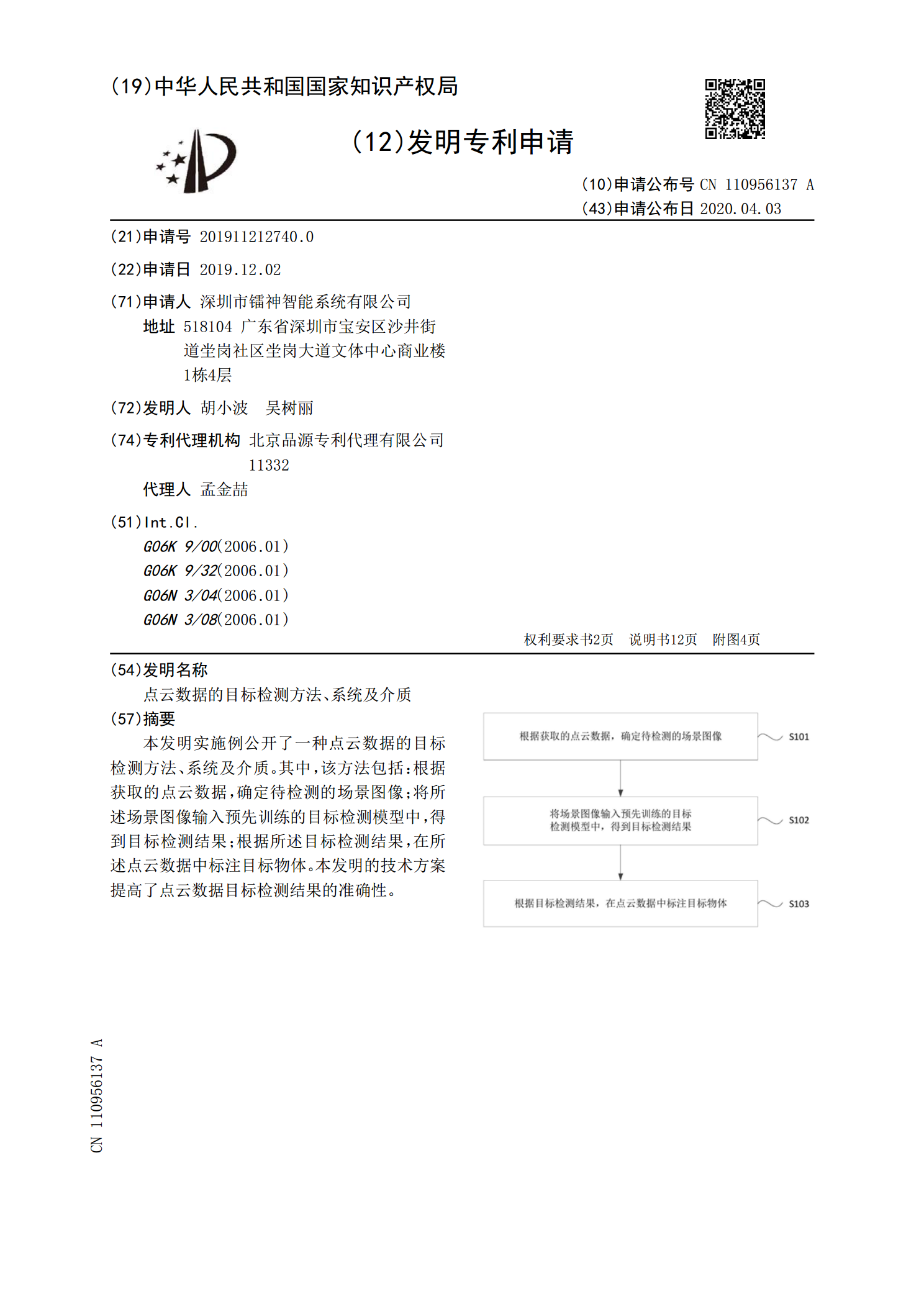
本发明实施例公开了一种点云数据的目标检测方法、系统及介质。其中,该方法包括:根据获取的点云数据,确定待检测的场景图像;将所述场景图像输入预先训练的目标检测模型中,得到目标检测结果;根据所述目标检测结果,在所述点云数据中标注目标物体。本发明的技术方案提高了点云数据目标检测结果的准确性。
点云数据的轨道提取方法、系统及介质.pdf
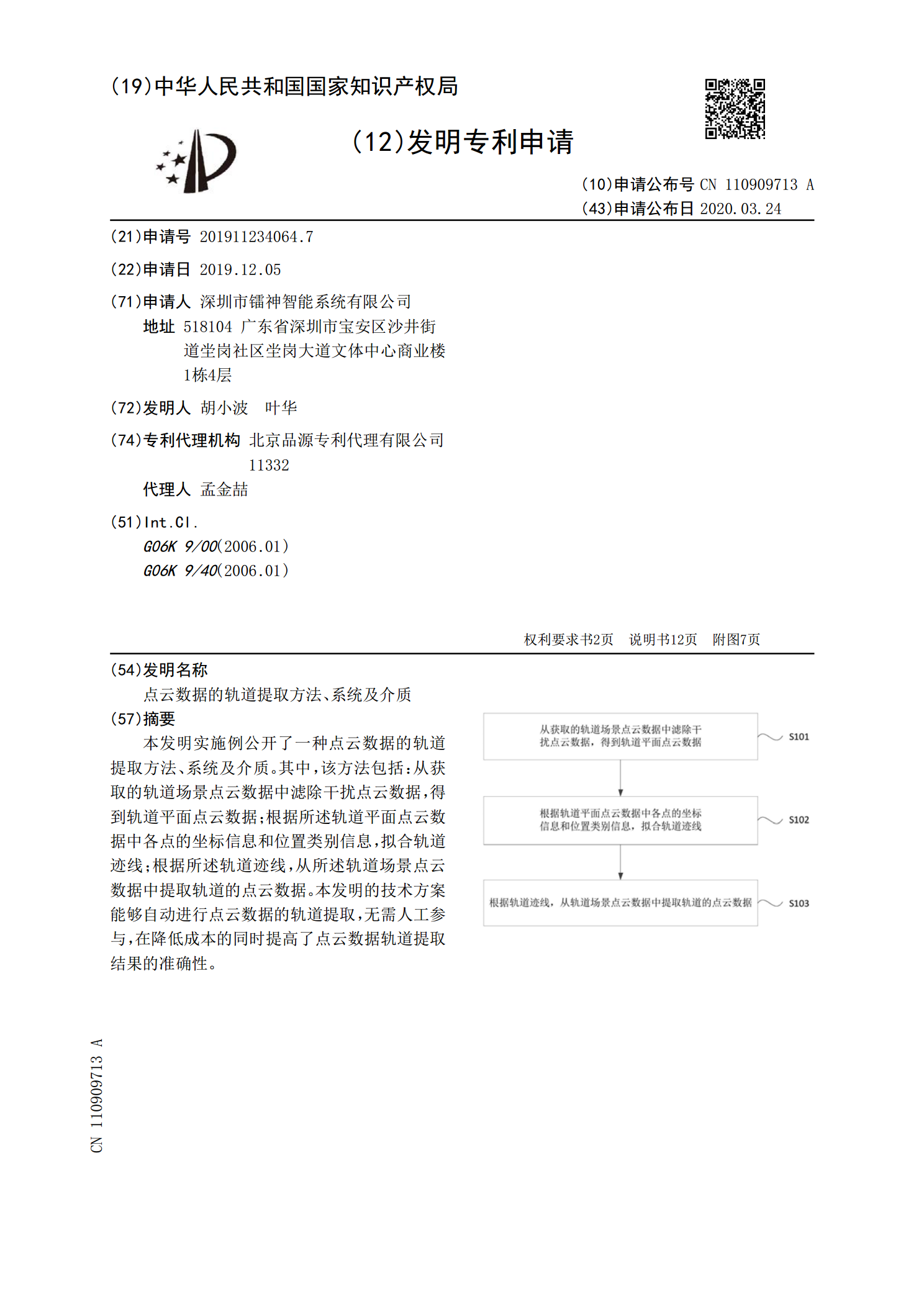
本发明实施例公开了一种点云数据的轨道提取方法、系统及介质。其中,该方法包括:从获取的轨道场景点云数据中滤除干扰点云数据,得到轨道平面点云数据;根据所述轨道平面点云数据中各点的坐标信息和位置类别信息,拟合轨道迹线;根据所述轨道迹线,从所述轨道场景点云数据中提取轨道的点云数据。本发明的技术方案能够自动进行点云数据的轨道提取,无需人工参与,在降低成本的同时提高了点云数据轨道提取结果的准确性。
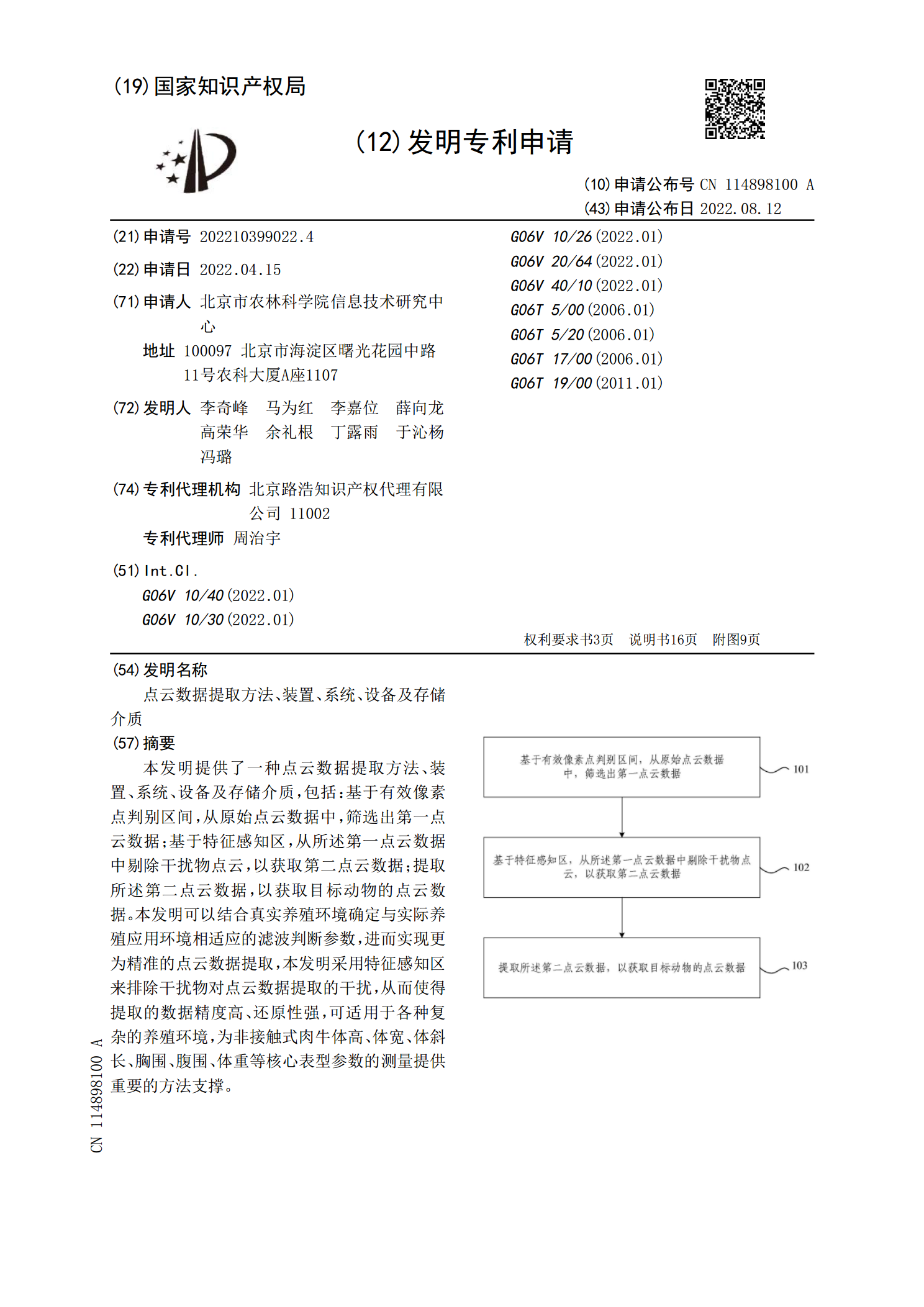
点云数据提取方法、装置、系统、设备及存储介质.pdf
本发明提供了一种点云数据提取方法、装置、系统、设备及存储介质,包括:基于有效像素点判别区间,从原始点云数据中,筛选出第一点云数据;基于特征感知区,从所述第一点云数据中剔除干扰物点云,以获取第二点云数据;提取所述第二点云数据,以获取目标动物的点云数据。本发明可以结合真实养殖环境确定与实际养殖应用环境相适应的滤波判断参数,进而实现更为精准的点云数据提取,本发明采用特征感知区来排除干扰物对点云数据提取的干扰,从而使得提取的数据精度高、还原性强,可适用于各种复杂的养殖环境,为非接触式肉牛体高、体宽、体斜长、胸围、
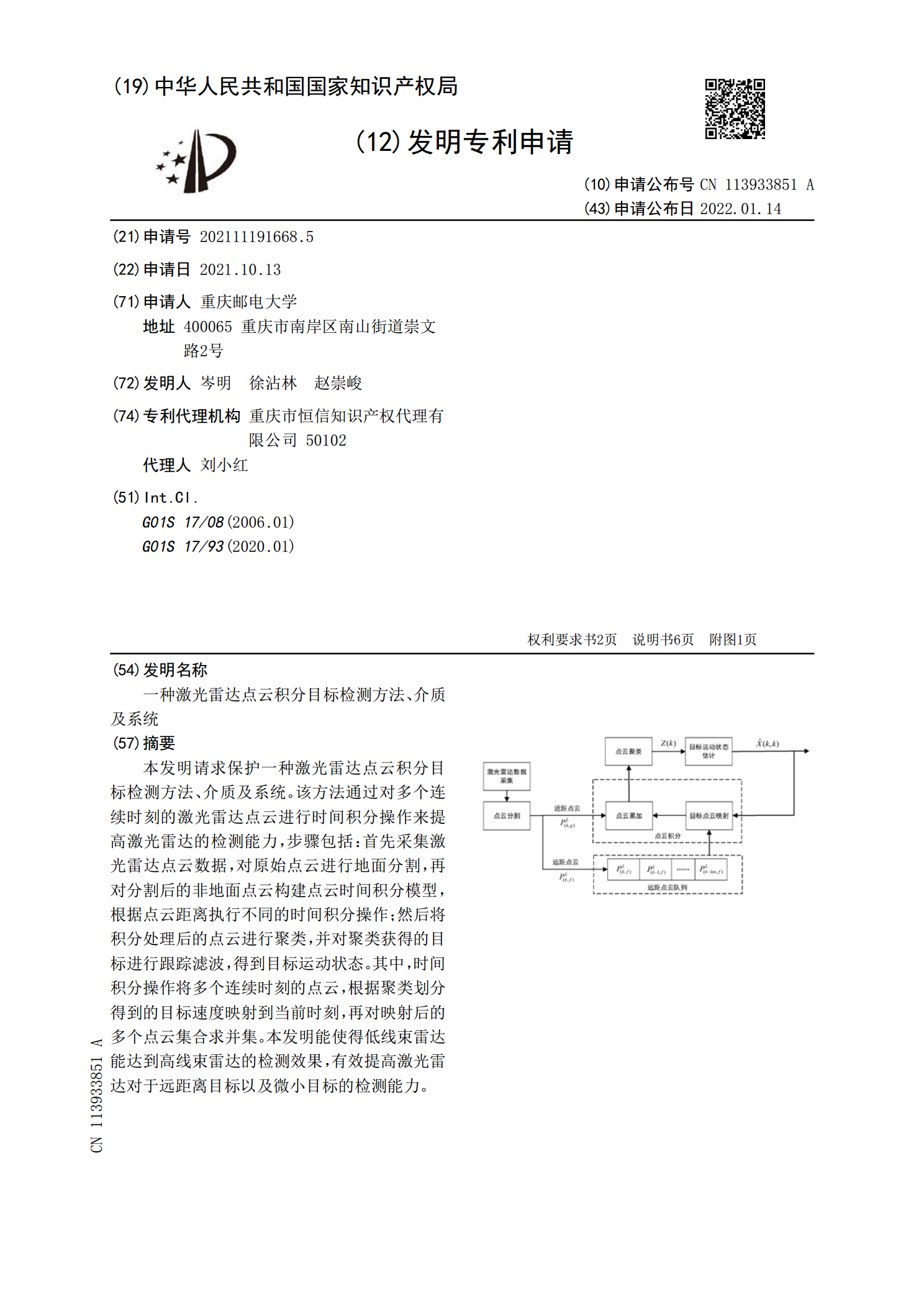
一种激光雷达点云积分目标检测方法、介质及系统.pdf
本发明请求保护一种激光雷达点云积分目标检测方法、介质及系统。该方法通过对多个连续时刻的激光雷达点云进行时间积分操作来提高激光雷达的检测能力,步骤包括:首先采集激光雷达点云数据,对原始点云进行地面分割,再对分割后的非地面点云构建点云时间积分模型,根据点云距离执行不同的时间积分操作;然后将积分处理后的点云进行聚类,并对聚类获得的目标进行跟踪滤波,得到目标运动状态。其中,时间积分操作将多个连续时刻的点云,根据聚类划分得到的目标速度映射到当前时刻,再对映射后的多个点云集合求并集。本发明能使得低线束雷达能达到高线束
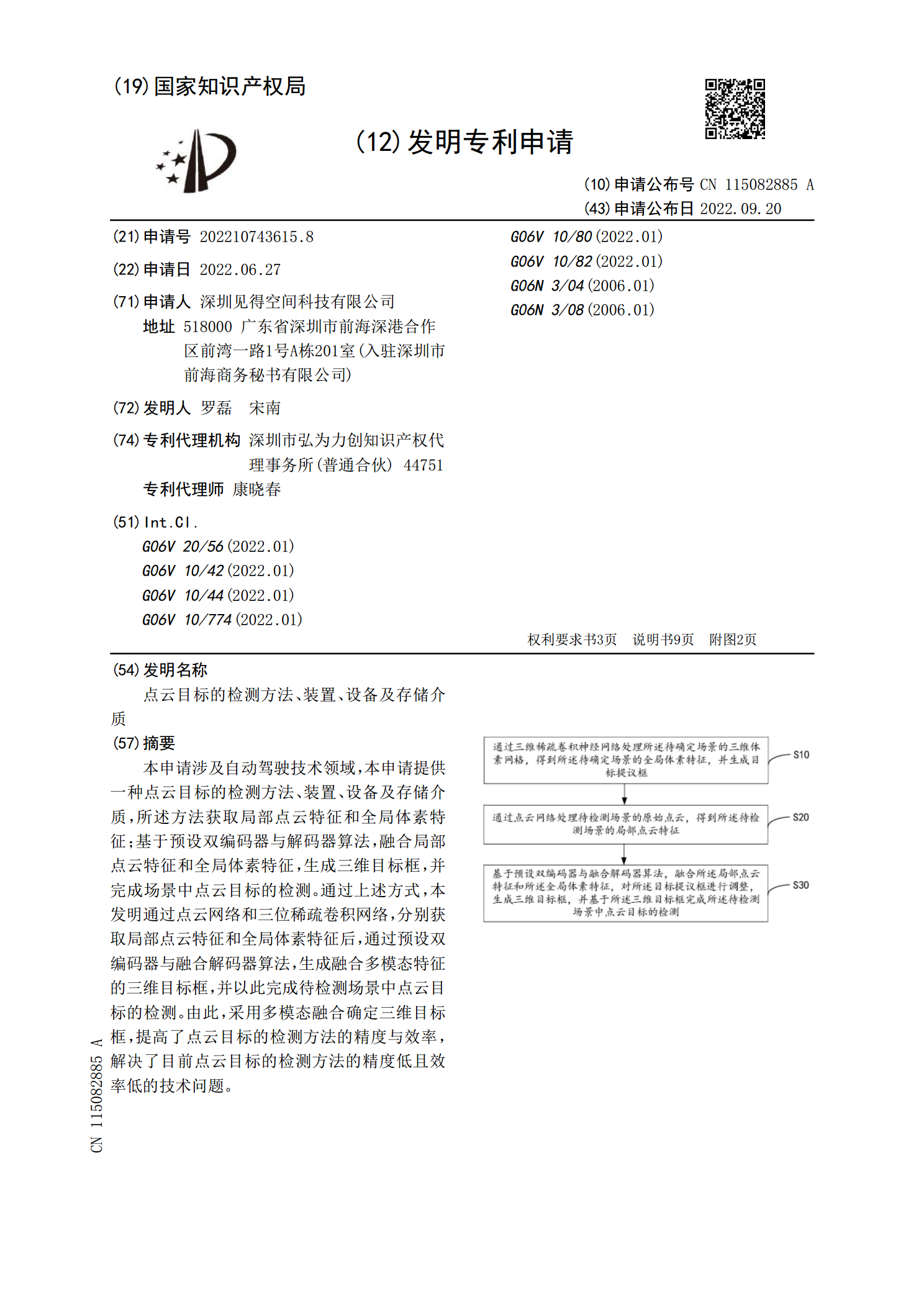
点云目标的检测方法、装置、设备及存储介质.pdf
本申请涉及自动驾驶技术领域,本申请提供一种点云目标的检测方法、装置、设备及存储介质,所述方法获取局部点云特征和全局体素特征;基于预设双编码器与解码器算法,融合局部点云特征和全局体素特征,生成三维目标框,并完成场景中点云目标的检测。通过上述方式,本发明通过点云网络和三位稀疏卷积网络,分别获取局部点云特征和全局体素特征后,通过预设双编码器与融合解码器算法,生成融合多模态特征的三维目标框,并以此完成待检测场景中点云目标的检测。由此,采用多模态融合确定三维目标框,提高了点云目标的检测方法的精度与效率,解决了目前点