
一种基于车路协同的无盲区感知方法和系统.pdf

听云****君哇

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于车路协同的无盲区感知方法和系统.pdf
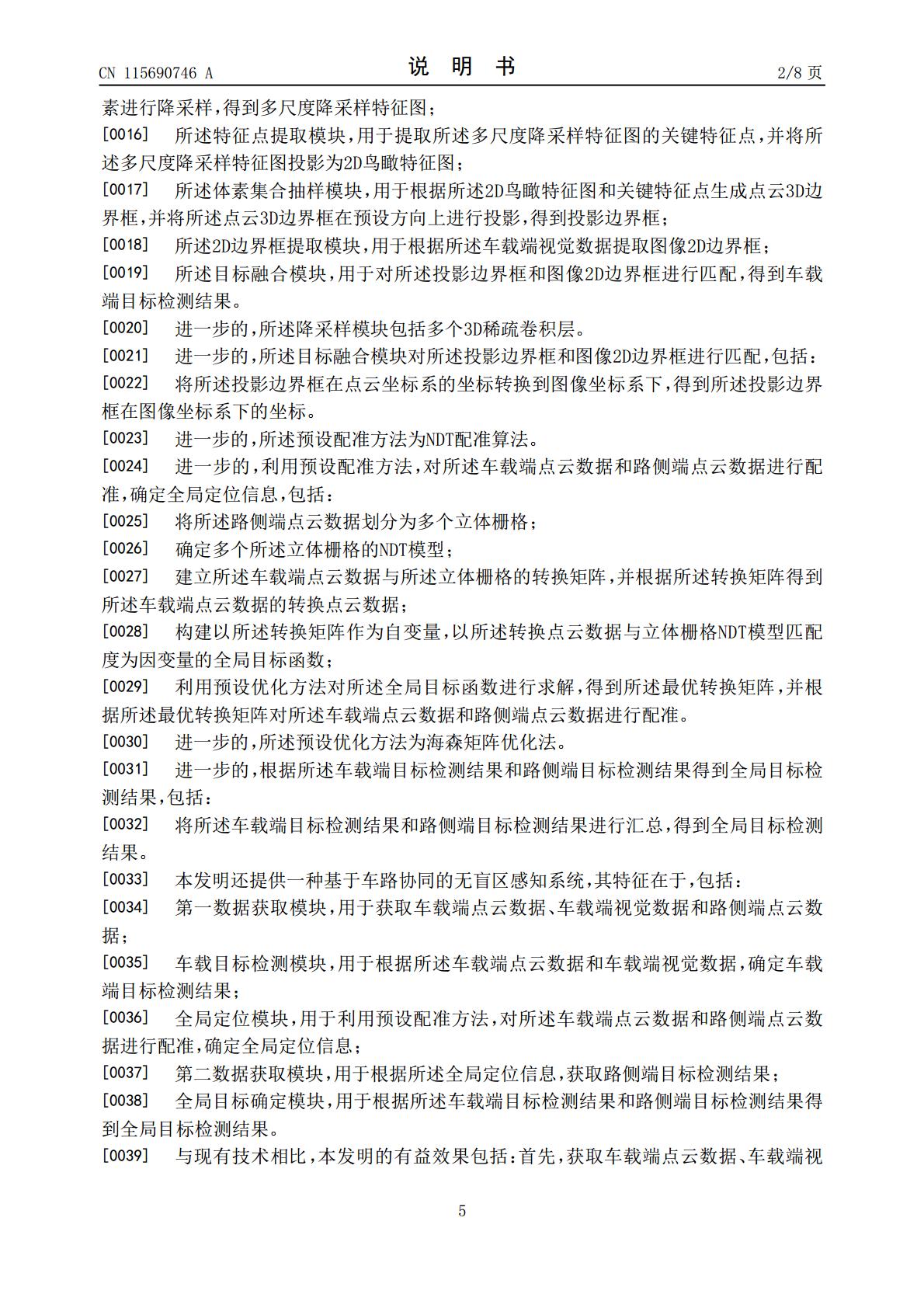
本申请公开了一种基于车路协同的无盲区感知方法和系统,该方法包括:获取车载端点云数据、车载端视觉数据和路侧端点云数据;根据车载端点云数据和车载端视觉数据,确定车载端目标检测结果;利用预设配准方法,对车载端点云数据和路侧端点云数据进行配准,确定全局定位信息;根据全局定位信息,获取路侧端目标检测结果;根据车载端目标检测结果和路侧端目标检测结果得到全局目标检测结果。本发明能够融合路侧检测结果和车载端目标检测结果,实现当前场景全局无盲区感知,为自动驾驶车辆提供准确、丰富的环境感知信息,克服了自动驾驶车辆感知范围存在
车路云协同感知的方法和系统.pdf
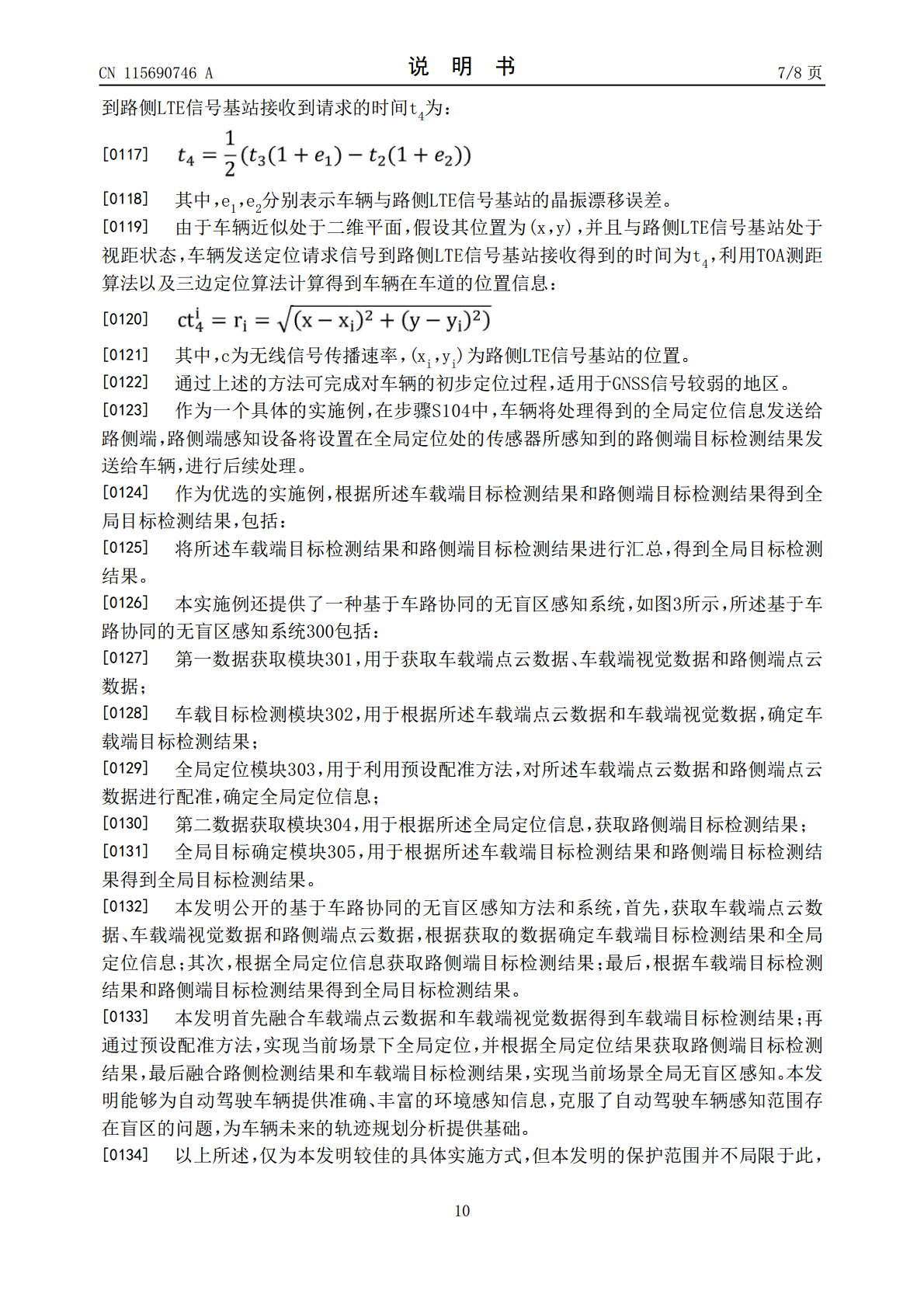
本发明实施例公开了一种车路云协同感知的方法和系统。该方法包括:云端服务器获取当前检测区域内车辆终端检测到的车端感知信息及路侧终端检测到的路侧端感知信息;云端服务器基于车端感知信息和路侧端感知信息,确定出当前检测区域的目标障碍物信息;云端服务器基于目标障碍物信息,在预先存储的与当前检测区域对应的区域线路中确定出至少一个障碍物。本发明实施例的技术方案,可以结合车端感知信息、路侧端感知信息和预先存储的区域线路的多方面信息确定障碍物,有效提升确定障碍物的准确性,能够更精确地对车辆进行控制,提高驾驶员的驾驶体验感。
一种基于车路协同的路侧感知融合系统及优化方法.pdf
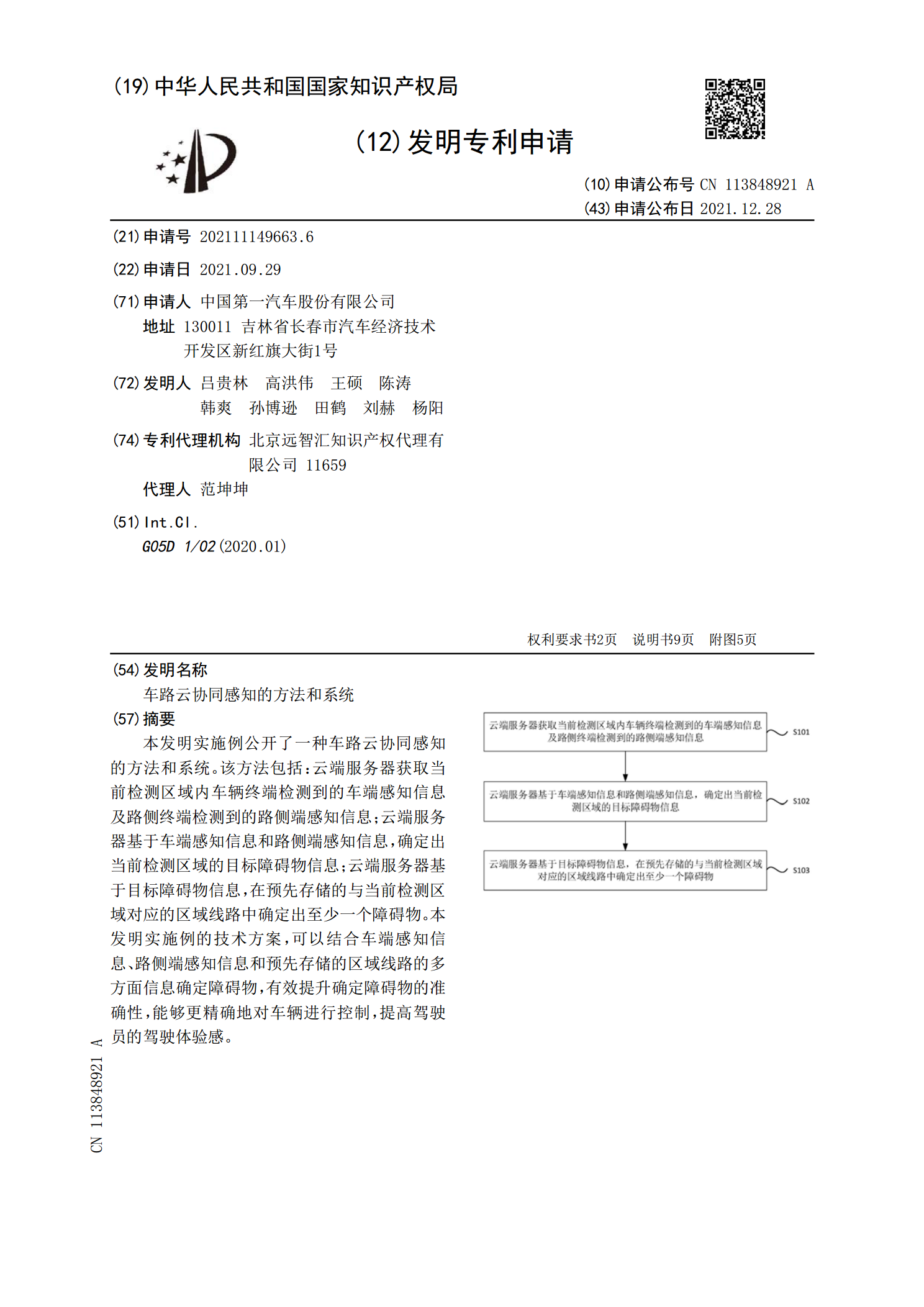
一种基于路侧感知融合系统的优化方法,将车端定位(车端高精度GNSS、惯导或高精度地图组合定位)作为定位真值基于车路协同方式发送至路侧单元,通过比对路侧感知设备获取的车辆定位值与车端基于车路协同方式反馈的定位真值来确定路侧感知设备感知的准确性。当二者差值在一定范围内时,利用因子图定位的方法基于车端定位数据对路侧感知设备所感知的全部目标定位进行修正,提高路侧感知设备感知道路目标数据精度,也将修正信息通过路侧边缘计算单元发送至云平台;当差值超出设定误差允许范围时,向平台端上报数据异常预警,实现对路侧感知数据的监

基于车路协同的点云目标检测和盲区目标检测方法及系统.pdf
本发明提供了一种基于车路协同的点云目标检测和盲区目标检测方法及系统,包括:图像目标检测和位置测算;基于校核器进行目标分类;依据校核器的目标分类结果,决定目标的检测方案;使用Pointnet++算法进行点云目标检测。通过巧妙地改变相机的位置和提出方形检索建议区域,应用到车路协同感知的新场景中去,达到了生成更优点云检索建议区域和盲区内目标检测的效果,保证了路灯故障下单车智能的独立性不受任何影响。因为路灯故障时,所有目标都被校核器判断为仅被车检测到的目标,该类目标将被决策为继续沿用搭载在车辆上的原Frustum
一种基于车路协同的超视距融合感知系统.pdf
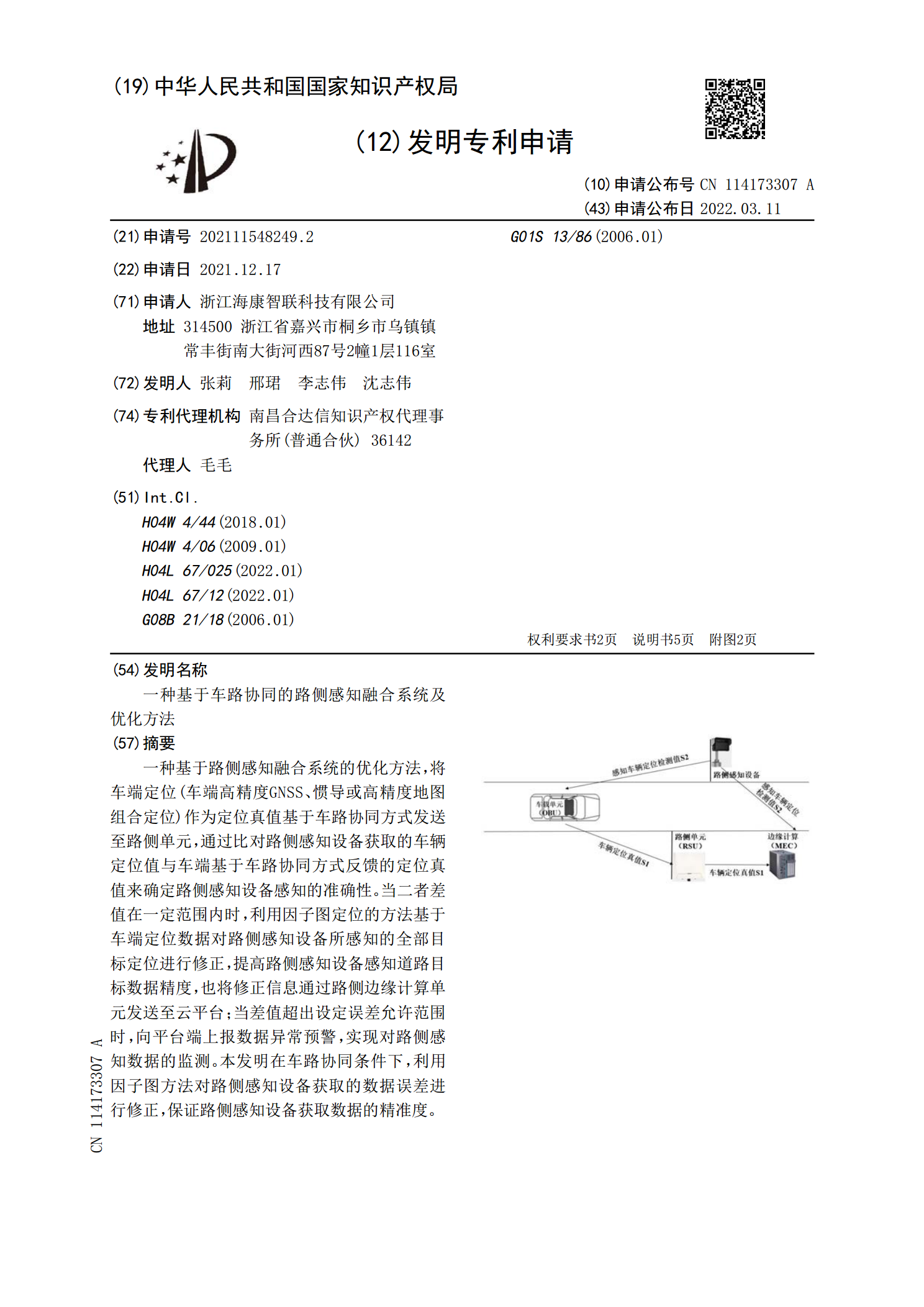
本发明涉及一种基于车路协同的超视距融合感知系统,车端感知子系统用于获取车辆周边环境结构化特征信息;路端感知子系统用于获取路端周边环境结构化特征信息;通讯子系统,包括无线通信方式连接的路端通讯模块和车端通讯模块;协同感知子系统利用粒子滤波算法,经过坐标转换后,将车辆周边环境结构化特征信息和路端周边环境结构化特征信息进行融合,得到超视距融合感知。与现有技术相比,本发明基于LTE‑V、5G等先进车联网技术,充分利用车端传感信息及路端传感信息,通过目标级的感知融合技术,来提高目标的检测视场范围及检测精度,克服了仅