
一种基于车间通信的可控震源车防撞车控制方法.pdf

睿德****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于车间通信的可控震源车防撞车控制方法.pdf
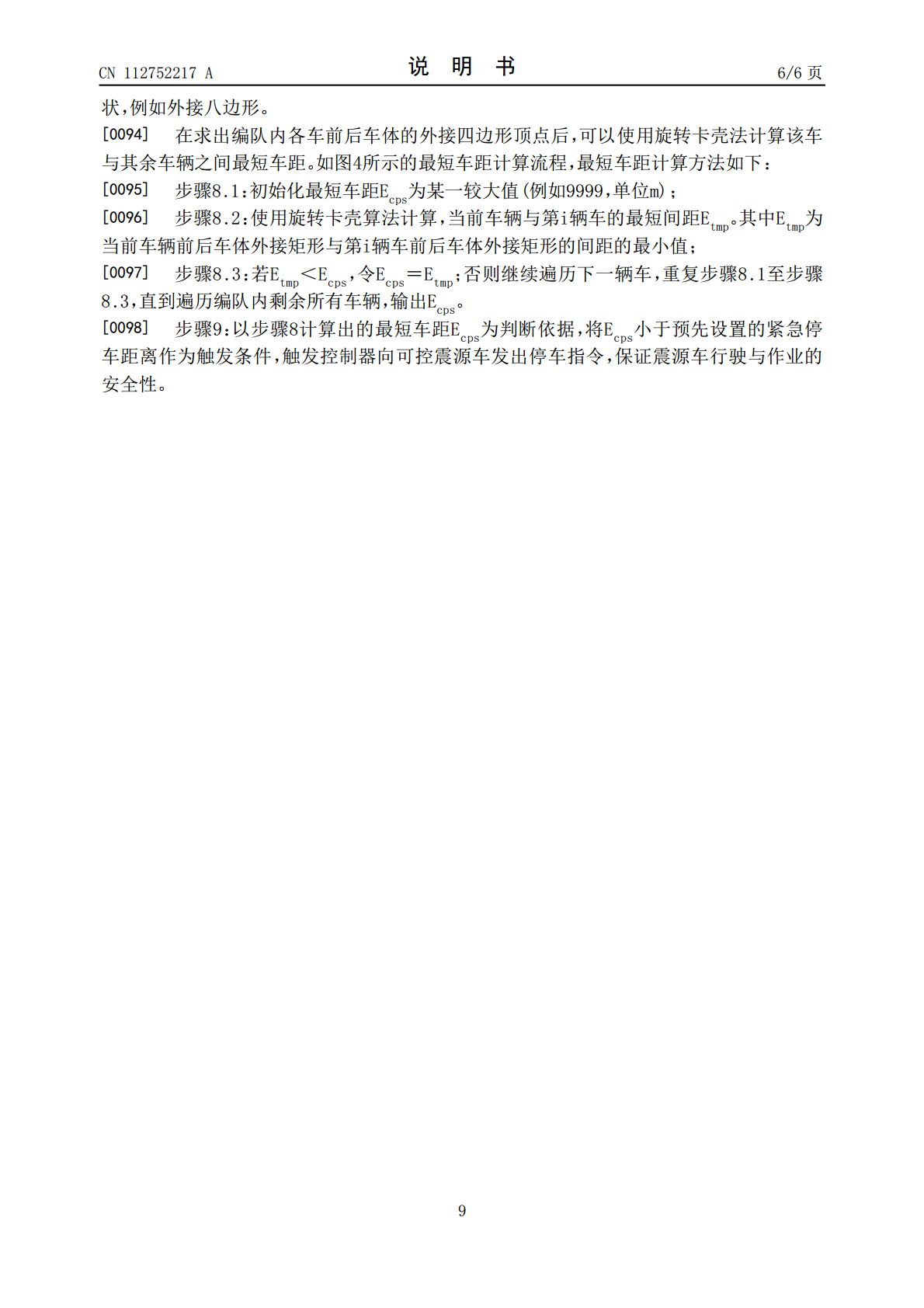
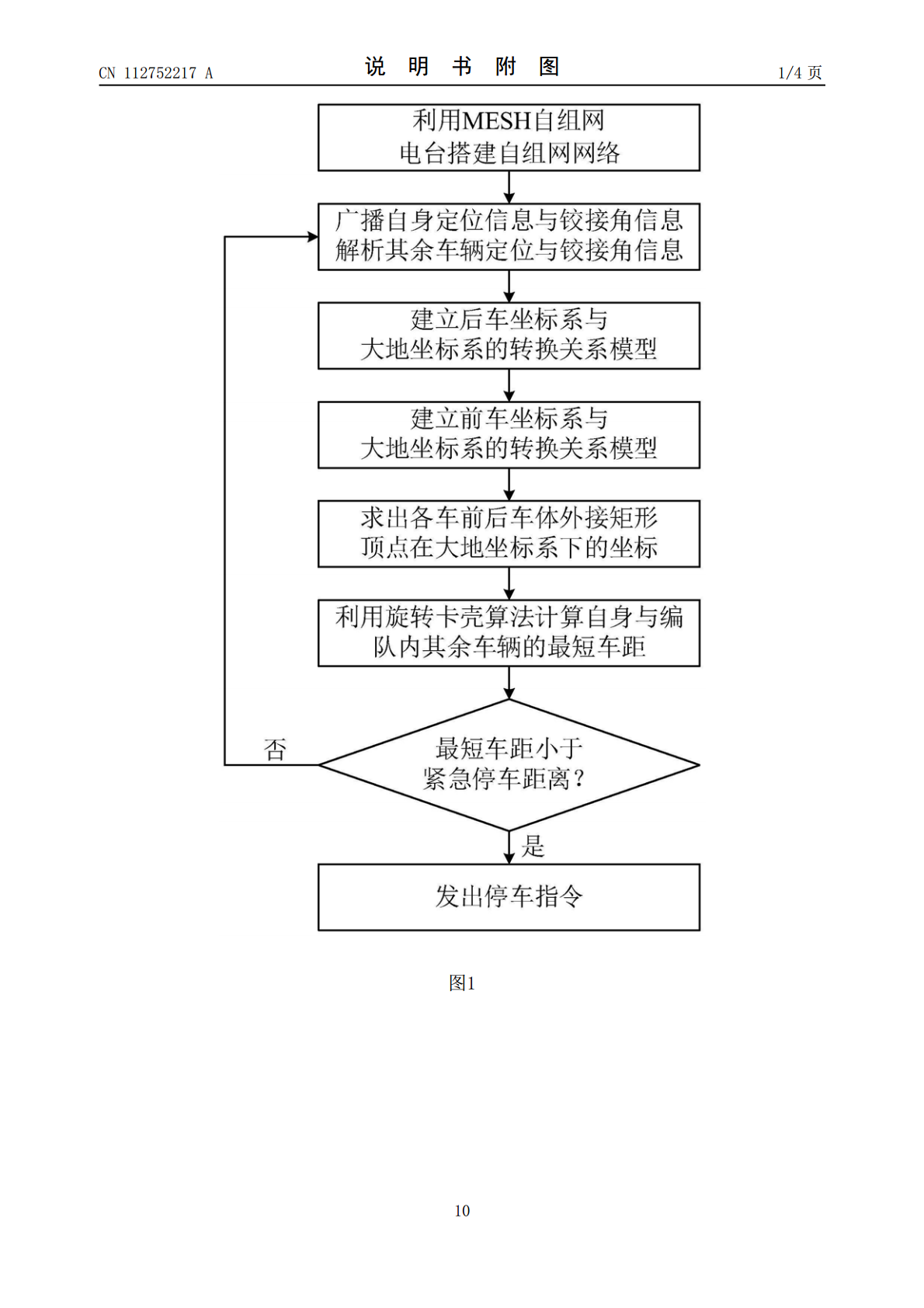
本发明公开了一种基于车间通信的可控震源车防撞车控制方法,属于地球物理勘探技术领域。本方法,首先利用可控震源车自带的MESH自组网电台对作业编队进行组网。然后通过自组网网络共享各车位置及铰接角信息,根据获取的信息建立“后车体坐标‑大地坐标”、“前车体坐标‑大地坐标”转换关系模型。最后,在统一的大地坐标系下利用旋转卡壳算法计算各车之间的最短间距,以此作为防撞控制的判断依据。本发明充分利用可控震源车自身设备,考虑了经济性,在不增加额外传感器的情况可实现可控震源车全天候、全天时、无盲区的车距检测,为可控震源车安全
一种可控震源软地表陷车自救方法.pdf
本发明提供了一种可控震源软地表陷车自救方法,包括以下步骤:首先将可控震源的振动平板下降支撑地面,整个可控震源的重心位置距离靠近振动平板中心,此时,未陷入的车轮离开地面;将垫木放在下陷车轮处的桥壳下方的地面上,再在垫木上放置气垫千斤顶;采用可控震源的气源对气垫千斤顶进行充气,将陷入的车轮顶出地面;再将陷坑填平,然后收起振动平板,将可控震源驶离淤陷区。本发明首先利用可控震源自身的振动平板提供的支撑力,可以为救援方案提供支点,同时减去振动器的重量后,降低了整个可控震源的重量,同时降低气垫千斤顶所需的载荷。
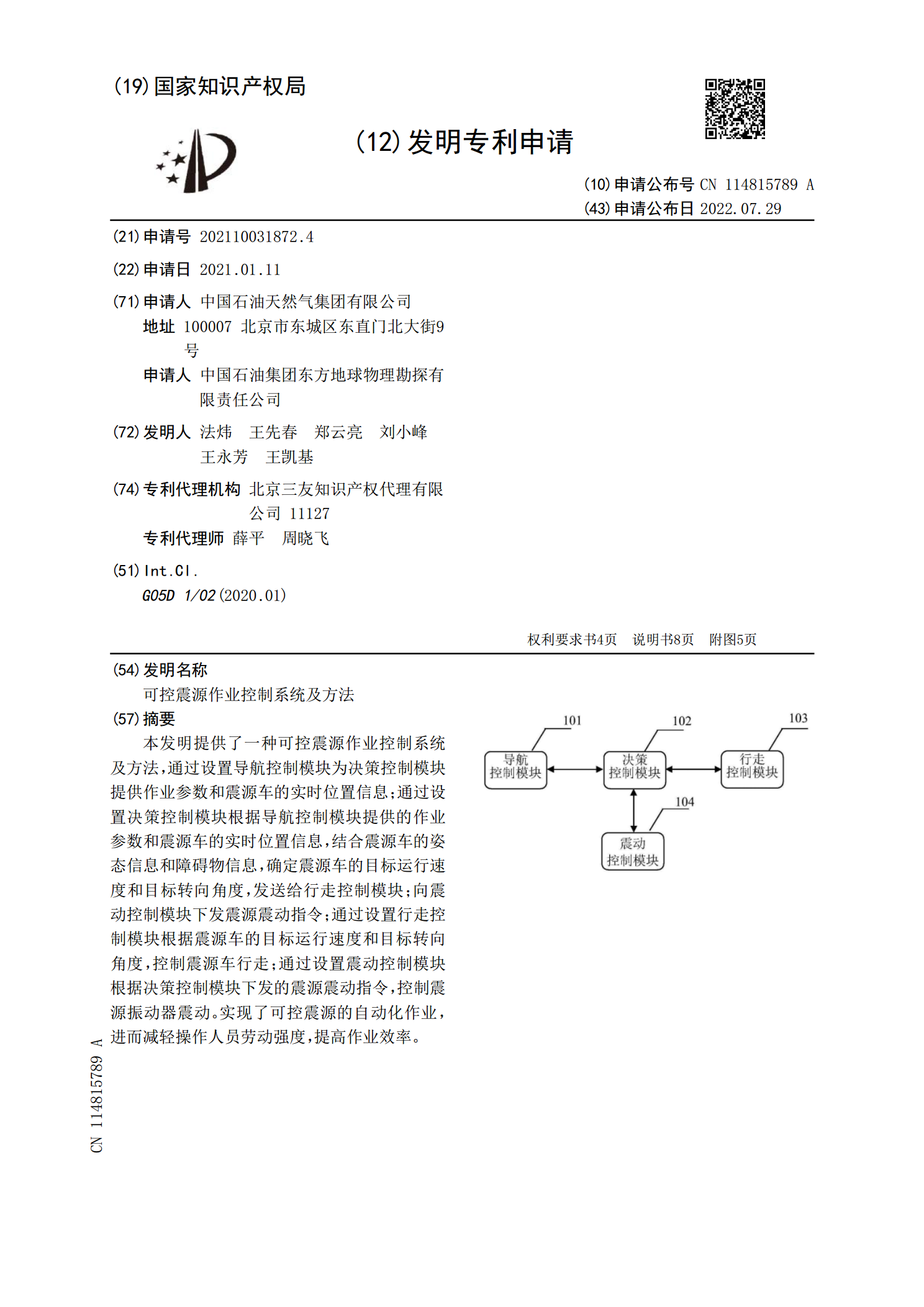
可控震源作业控制系统及方法.pdf
本发明提供了一种可控震源作业控制系统及方法,通过设置导航控制模块为决策控制模块提供作业参数和震源车的实时位置信息;通过设置决策控制模块根据导航控制模块提供的作业参数和震源车的实时位置信息,结合震源车的姿态信息和障碍物信息,确定震源车的目标运行速度和目标转向角度,发送给行走控制模块;向震动控制模块下发震源震动指令;通过设置行走控制模块根据震源车的目标运行速度和目标转向角度,控制震源车行走;通过设置震动控制模块根据决策控制模块下发的震源震动指令,控制震源振动器震动。实现了可控震源的自动化作业,进而减轻操作人员
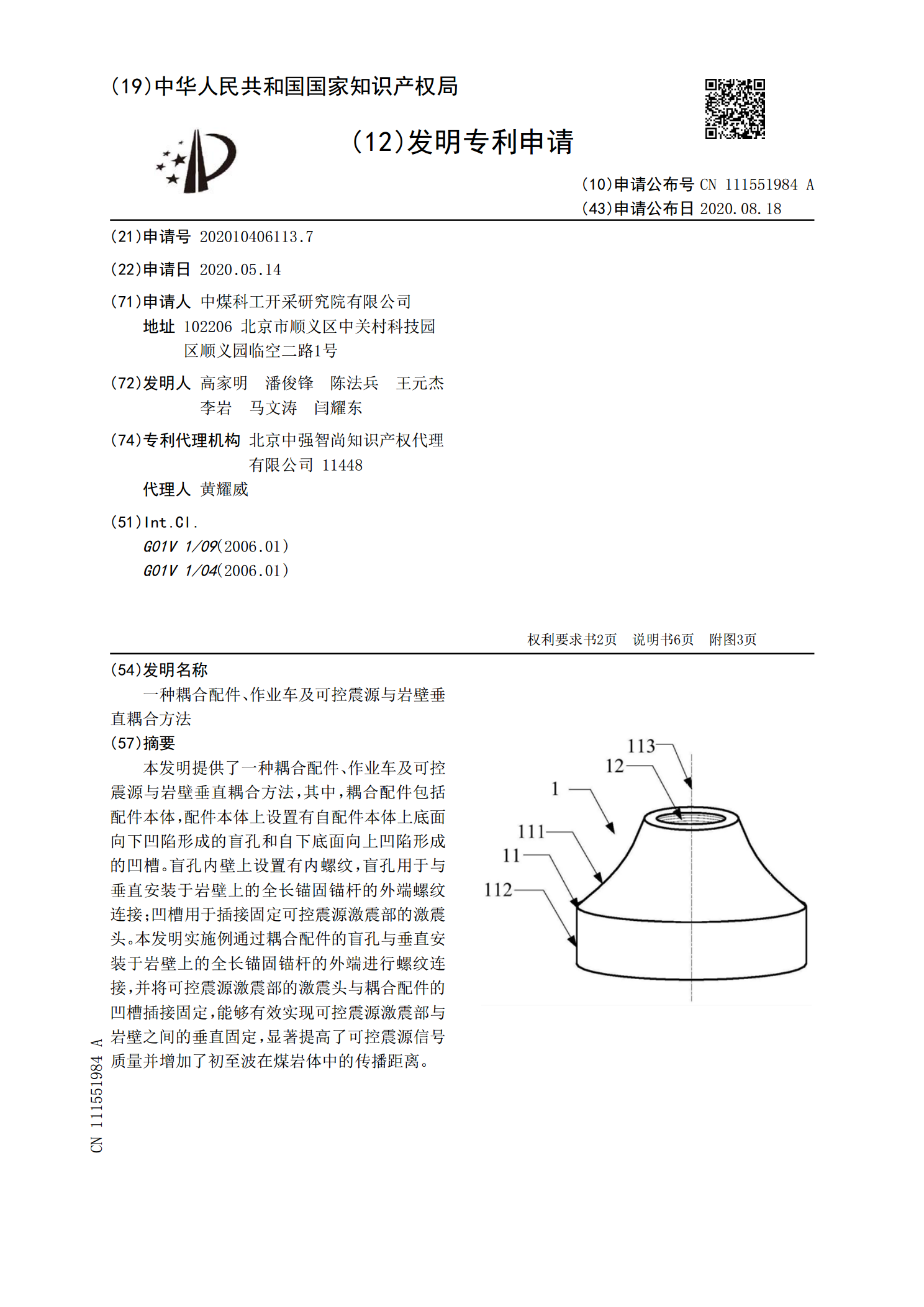
一种耦合配件、作业车及可控震源与岩壁垂直耦合方法.pdf
本发明提供了一种耦合配件、作业车及可控震源与岩壁垂直耦合方法,其中,耦合配件包括配件本体,配件本体上设置有自配件本体上底面向下凹陷形成的盲孔和自下底面向上凹陷形成的凹槽。盲孔内壁上设置有内螺纹,盲孔用于与垂直安装于岩壁上的全长锚固锚杆的外端螺纹连接;凹槽用于插接固定可控震源激震部的激震头。本发明实施例通过耦合配件的盲孔与垂直安装于岩壁上的全长锚固锚杆的外端进行螺纹连接,并将可控震源激震部的激震头与耦合配件的凹槽插接固定,能够有效实现可控震源激震部与岩壁之间的垂直固定,显著提高了可控震源信号质量并增加了初至
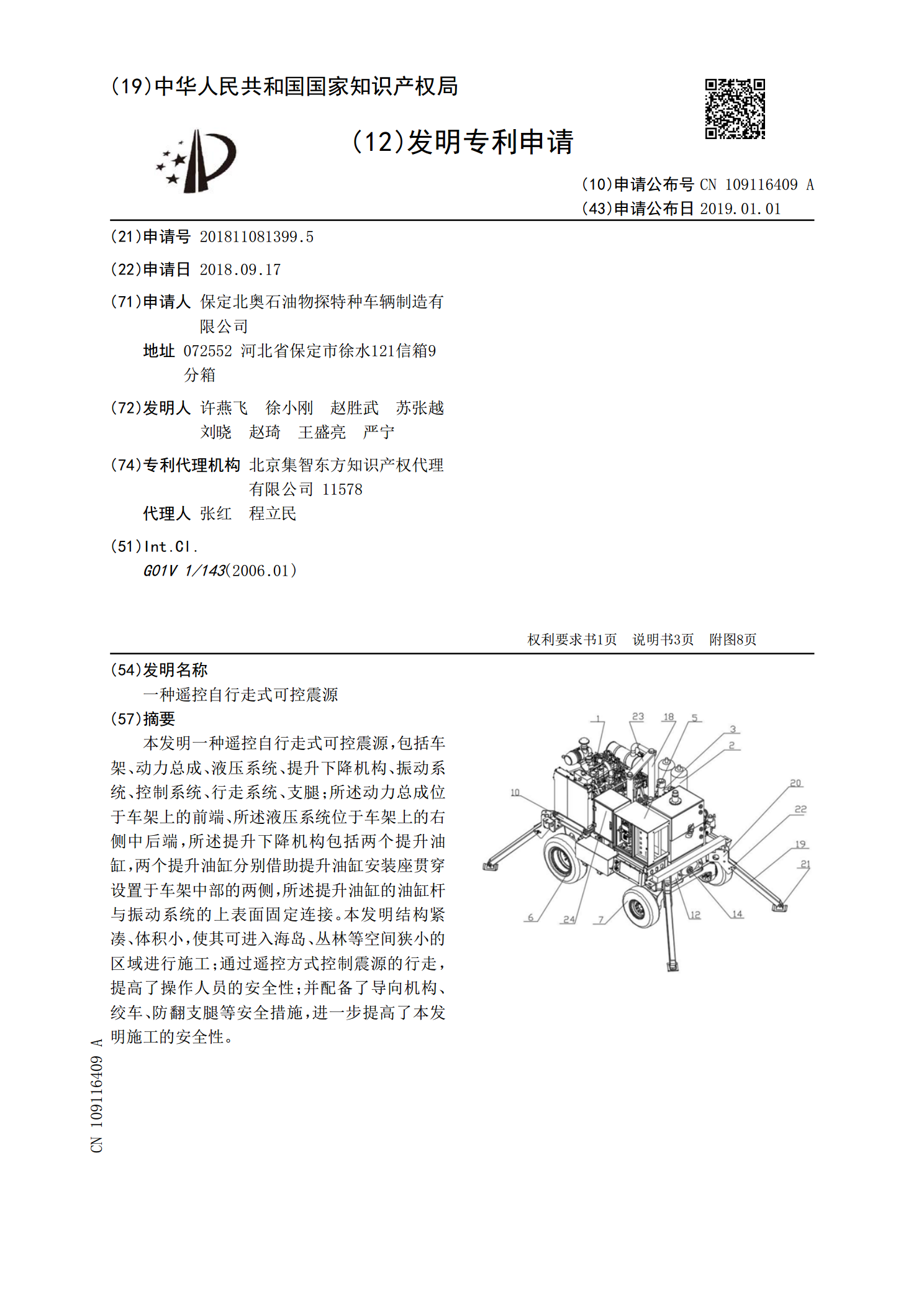
一种遥控自行走式可控震源.pdf
本发明一种遥控自行走式可控震源,包括车架、动力总成、液压系统、提升下降机构、振动系统、控制系统、行走系统、支腿;所述动力总成位于车架上的前端、所述液压系统位于车架上的右侧中后端,所述提升下降机构包括两个提升油缸,两个提升油缸分别借助提升油缸安装座贯穿设置于车架中部的两侧,所述提升油缸的油缸杆与振动系统的上表面固定连接。本发明结构紧凑、体积小,使其可进入海岛、丛林等空间狭小的区域进行施工;通过遥控方式控制震源的行走,提高了操作人员的安全性;并配备了导向机构、绞车、防翻支腿等安全措施,进一步提高了本发明施工的