
可控震源作业控制系统及方法.pdf

一条****贺6


1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可控震源作业控制系统及方法.pdf
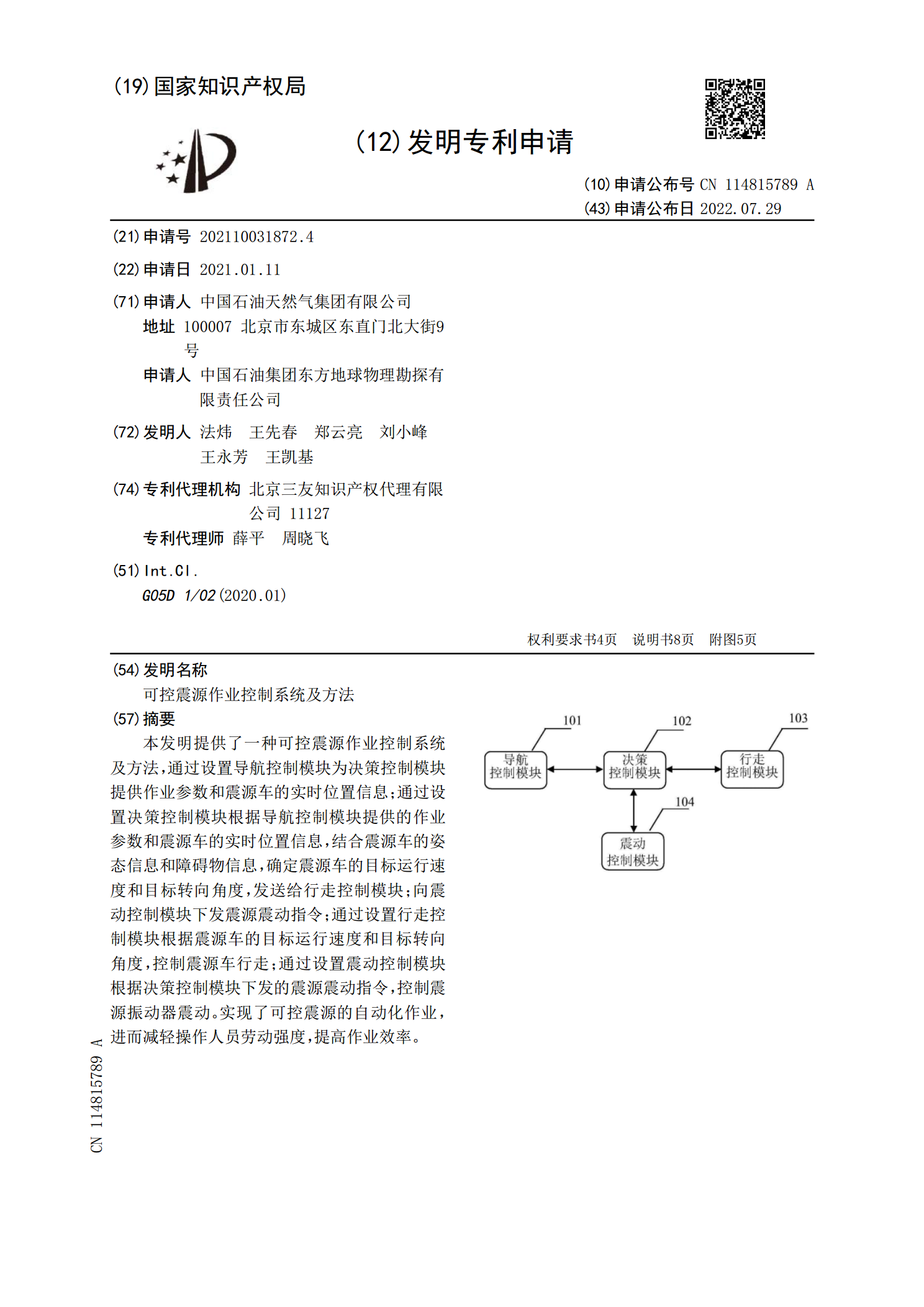
本发明提供了一种可控震源作业控制系统及方法,通过设置导航控制模块为决策控制模块提供作业参数和震源车的实时位置信息;通过设置决策控制模块根据导航控制模块提供的作业参数和震源车的实时位置信息,结合震源车的姿态信息和障碍物信息,确定震源车的目标运行速度和目标转向角度,发送给行走控制模块;向震动控制模块下发震源震动指令;通过设置行走控制模块根据震源车的目标运行速度和目标转向角度,控制震源车行走;通过设置震动控制模块根据决策控制模块下发的震源震动指令,控制震源振动器震动。实现了可控震源的自动化作业,进而减轻操作人员

VE416可控震源控制系统常见故障及修理方法.docx
VE416可控震源控制系统常见故障及修理方法VE416可控震源控制系统是一种用于地震研究的仪器设备,常见的故障包括硬件故障和软件故障。本文将介绍VE416可控震源控制系统常见故障及修理方法,并提供相关解决方案。一、硬件故障1.电源故障:电源故障可能导致设备无法正常工作。当设备无法启动或无法正常供电时,首先需要检查电源连接是否正确,是否有电力供应。如果电源连接正常,可以尝试更换电源线缆或电源适配器,排除电源故障。2.控制板故障:控制板是VE416可控震源控制系统的核心部件之一,负责设备的运行和控制。当设备无

可控震源匹配扫描方法研究.docx
可控震源匹配扫描方法研究随着地震研究的不断深入,对地震源机制的研究也日益重要。可控震源匹配扫描(SourceScanningImaging)是一种新的地震反演技术,它通过对事件的时间序列波形进行匹配扫描,推导出地震源的空间位置、大小、运动以及地震破裂过程等信息。可控震源匹配扫描技术的基本原理是在已知事件观测台站附近构建一个可控震源群,然后通过在每个震源处逐渐调整震源机制,计算模拟波形和观测波形之间的匹配度,并寻找最小误差的匹配震源机制。这种方法可以有效地消除地球物理模型的不确定性,并快速、精确地确定震源机

可控震源作业指导书中文.docx
可控震源作业指导书该可控震源作业指导书用于震源的野外的生产。主要有以下五个方面:1.生产前的准备;2.野外生产管理;3.质量管理;4.震源的运行记录和维护;5.震源的HSE。该作业指导书的目的是让每一个震源工作人员知道在安全的条件下生产是第一位的,以获取更多的利润并使震源保持良好的状态。震源监督和机械师的应做的工作不仅仅限于以下包括的内容。1.0生产前的准备1.1下述文件应提交给客户:震源和箱体的型号,系列号,技术规格和生产年代。震源和箱体的状态报告。震源监督和机械师的技术背景1.2为保证震源合同期需要的

可控震源滑动扫描采集方法及应用.docx
可控震源滑动扫描采集方法及应用近年来,地震活动频繁,对人类社会的安全和发展带来了很大威胁。可控震源滑动扫描采集技术是一种新型的地震勘探方法,它以地震波在地球内部传播的物理规律为基础,通过控制地震源滑动扫描来获取地下结构信息,不仅可以提高地震勘探的准确性,而且具有较强的实用价值,因此引起了国内外学者的广泛关注和研究。一、可控震源滑动扫描采集原理可控震源滑动扫描采集技术的原理是在地下埋设多组震源和接收器,首先以一组震源发出强烈的振动波,然后捕捉这些振动波在地下传播过程中的反射和干涉信息,利用信号处理技术获取地