
一种车辆A柱盲区透视方法、系统及车辆.pdf

努力****元恺

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆A柱盲区透视方法、系统及车辆.pdf
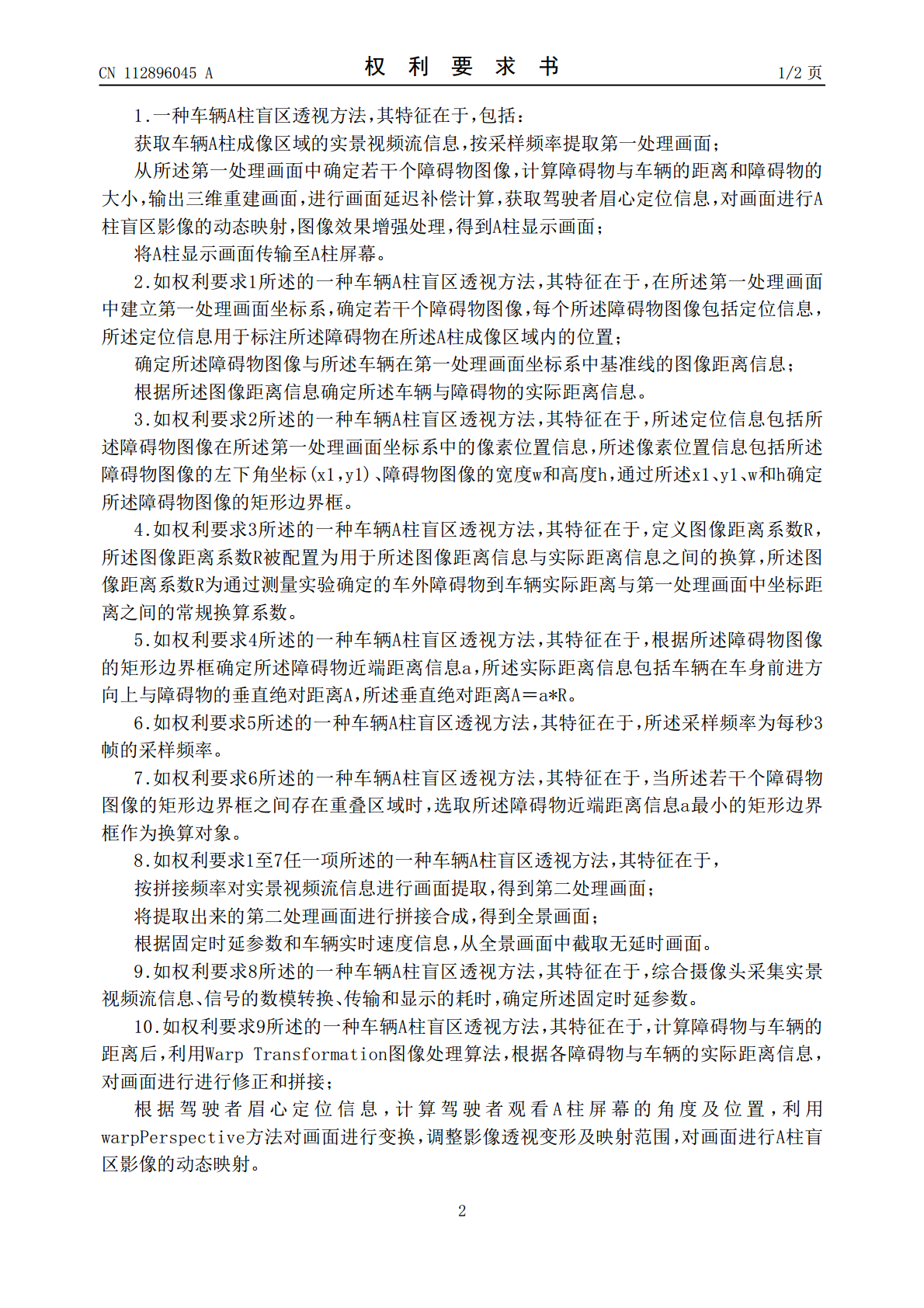
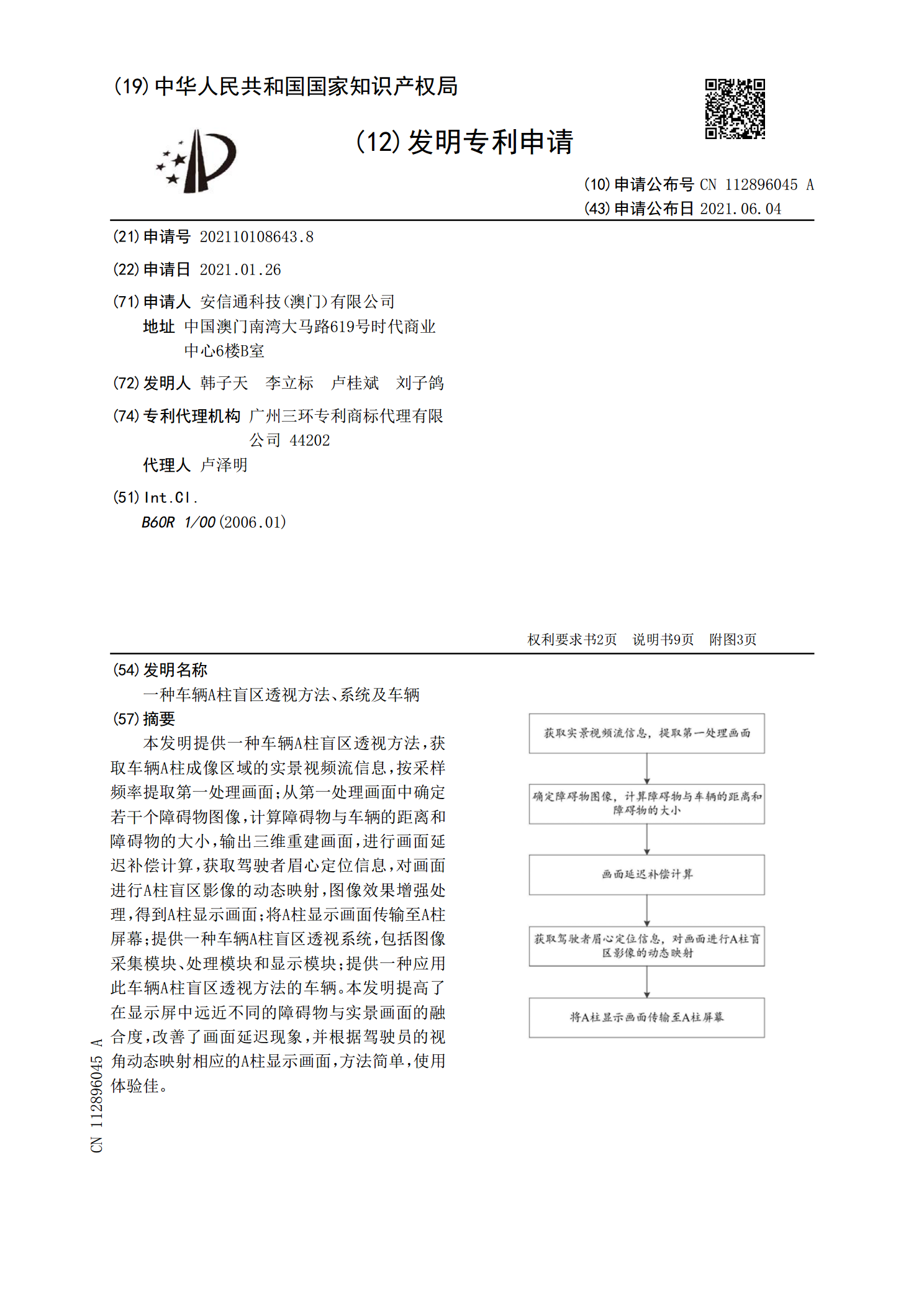
本发明提供一种车辆A柱盲区透视方法,获取车辆A柱成像区域的实景视频流信息,按采样频率提取第一处理画面;从第一处理画面中确定若干个障碍物图像,计算障碍物与车辆的距离和障碍物的大小,输出三维重建画面,进行画面延迟补偿计算,获取驾驶者眉心定位信息,对画面进行A柱盲区影像的动态映射,图像效果增强处理,得到A柱显示画面;将A柱显示画面传输至A柱屏幕;提供一种车辆A柱盲区透视系统,包括图像采集模块、处理模块和显示模块;提供一种应用此车辆A柱盲区透视方法的车辆。本发明提高了在显示屏中远近不同的障碍物与实景画面的融合度,
一种车辆A柱、车辆A柱盲区监测方法及监测系统.pdf
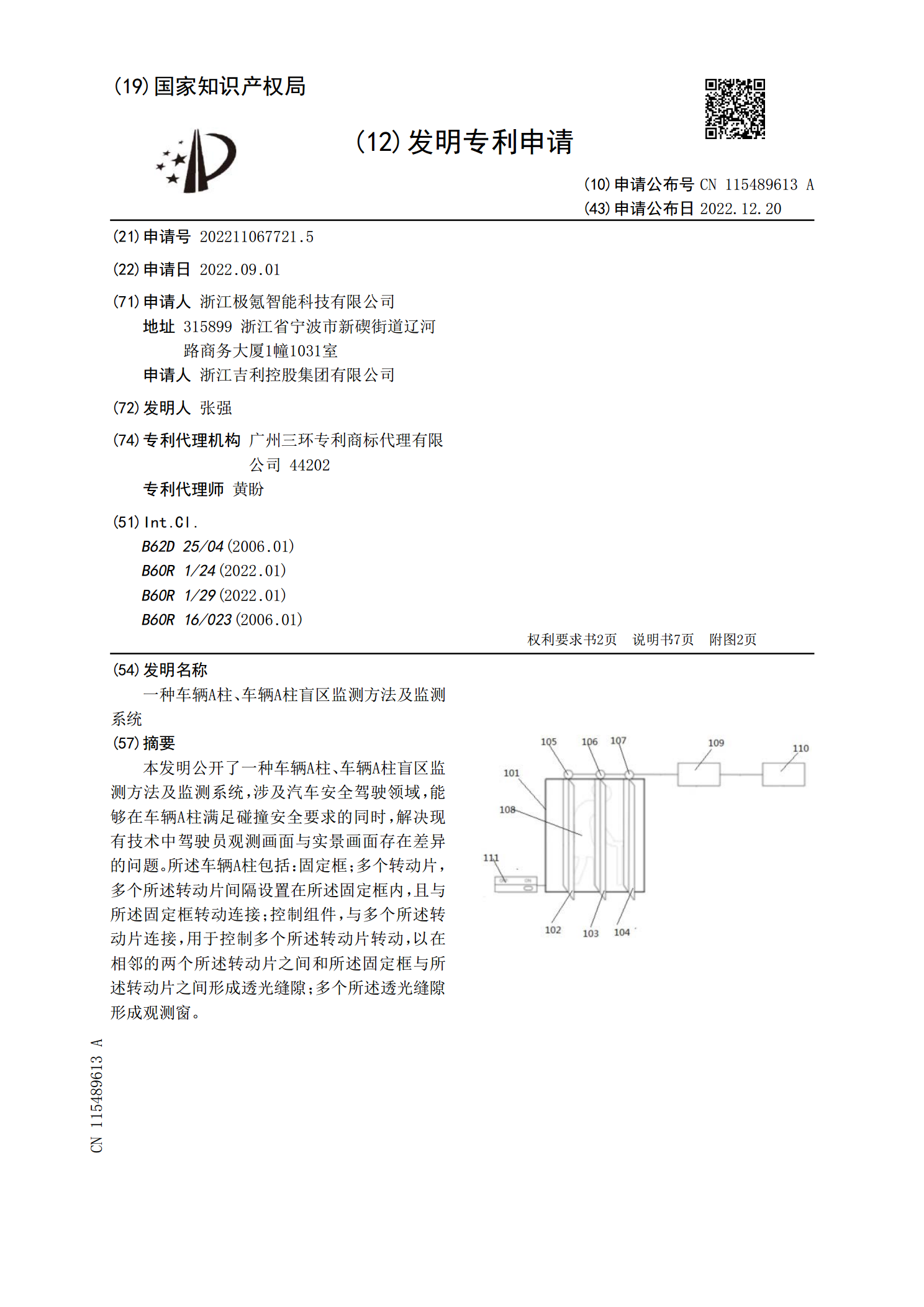
本发明公开了一种车辆A柱、车辆A柱盲区监测方法及监测系统,涉及汽车安全驾驶领域,能够在车辆A柱满足碰撞安全要求的同时,解决现有技术中驾驶员观测画面与实景画面存在差异的问题。所述车辆A柱包括:固定框;多个转动片,多个所述转动片间隔设置在所述固定框内,且与所述固定框转动连接;控制组件,与多个所述转动片连接,用于控制多个所述转动片转动,以在相邻的两个所述转动片之间和所述固定框与所述转动片之间形成透光缝隙;多个所述透光缝隙形成观测窗。
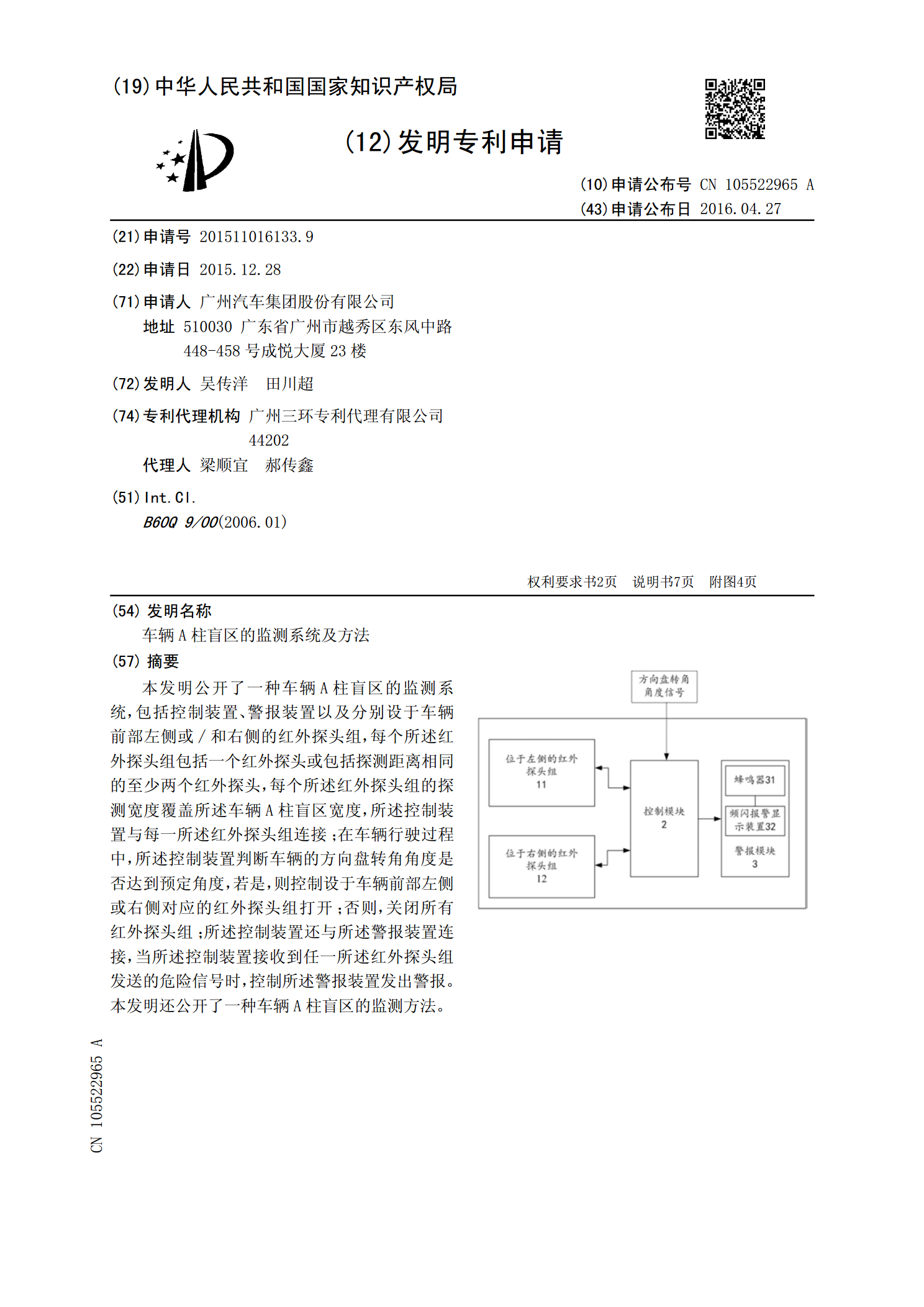
车辆A柱盲区的监测系统及方法.pdf
本发明公开了一种车辆A柱盲区的监测系统,包括控制装置、警报装置以及分别设于车辆前部左侧或/和右侧的红外探头组,每个所述红外探头组包括一个红外探头或包括探测距离相同的至少两个红外探头,每个所述红外探头组的探测宽度覆盖所述车辆A柱盲区宽度,所述控制装置与每一所述红外探头组连接;在车辆行驶过程中,所述控制装置判断车辆的方向盘转角角度是否达到预定角度,若是,则控制设于车辆前部左侧或右侧对应的红外探头组打开;否则,关闭所有红外探头组;所述控制装置还与所述警报装置连接,当所述控制装置接收到任一所述红外探头组发送的危险
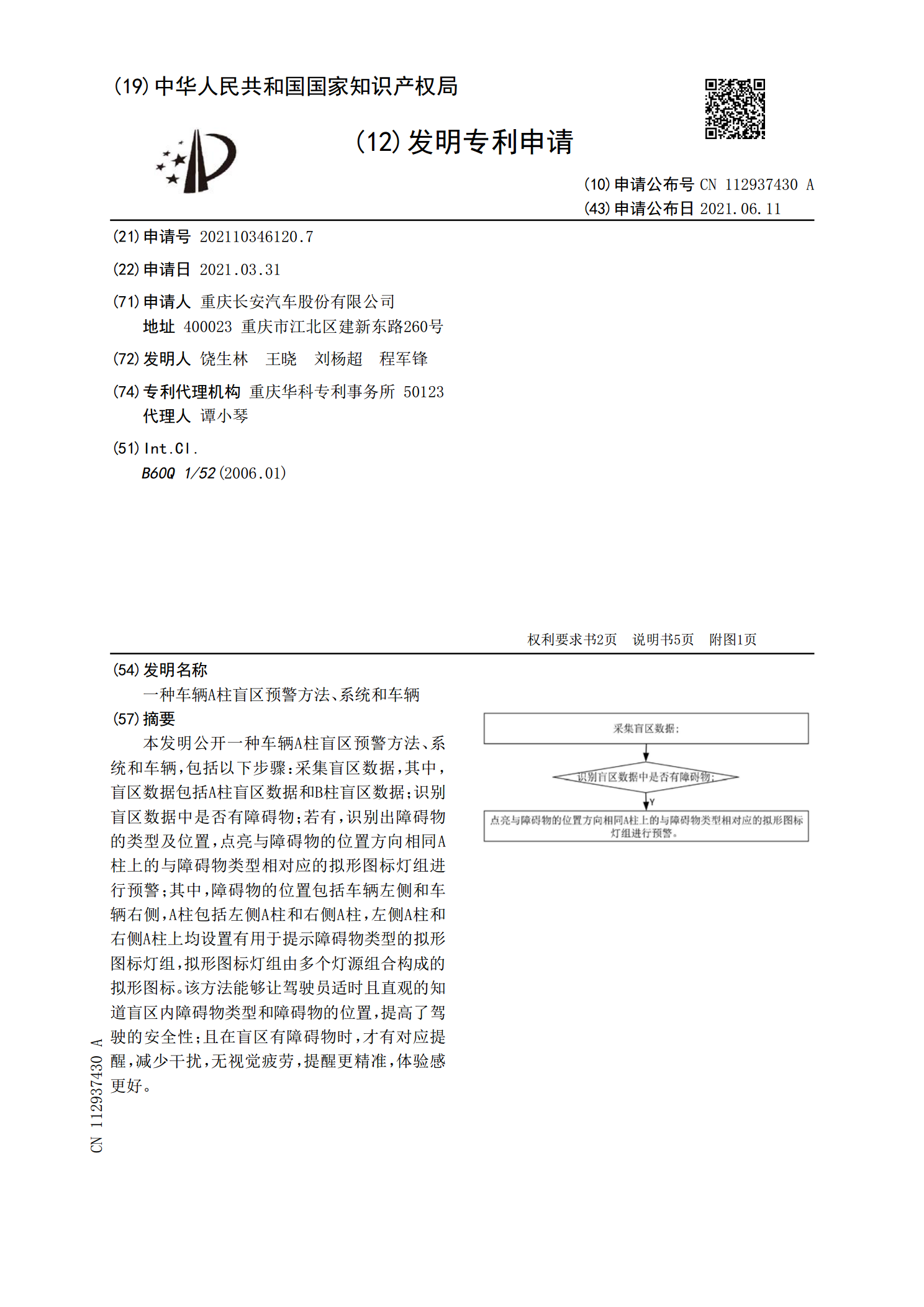
一种车辆A柱盲区预警方法、系统和车辆.pdf
本发明公开一种车辆A柱盲区预警方法、系统和车辆,包括以下步骤:采集盲区数据,其中,盲区数据包括A柱盲区数据和B柱盲区数据;识别盲区数据中是否有障碍物;若有,识别出障碍物的类型及位置,点亮与障碍物的位置方向相同A柱上的与障碍物类型相对应的拟形图标灯组进行预警;其中,障碍物的位置包括车辆左侧和车辆右侧,A柱包括左侧A柱和右侧A柱,左侧A柱和右侧A柱上均设置有用于提示障碍物类型的拟形图标灯组,拟形图标灯组由多个灯源组合构成的拟形图标。该方法能够让驾驶员适时且直观的知道盲区内障碍物类型和障碍物的位置,提高了驾驶的
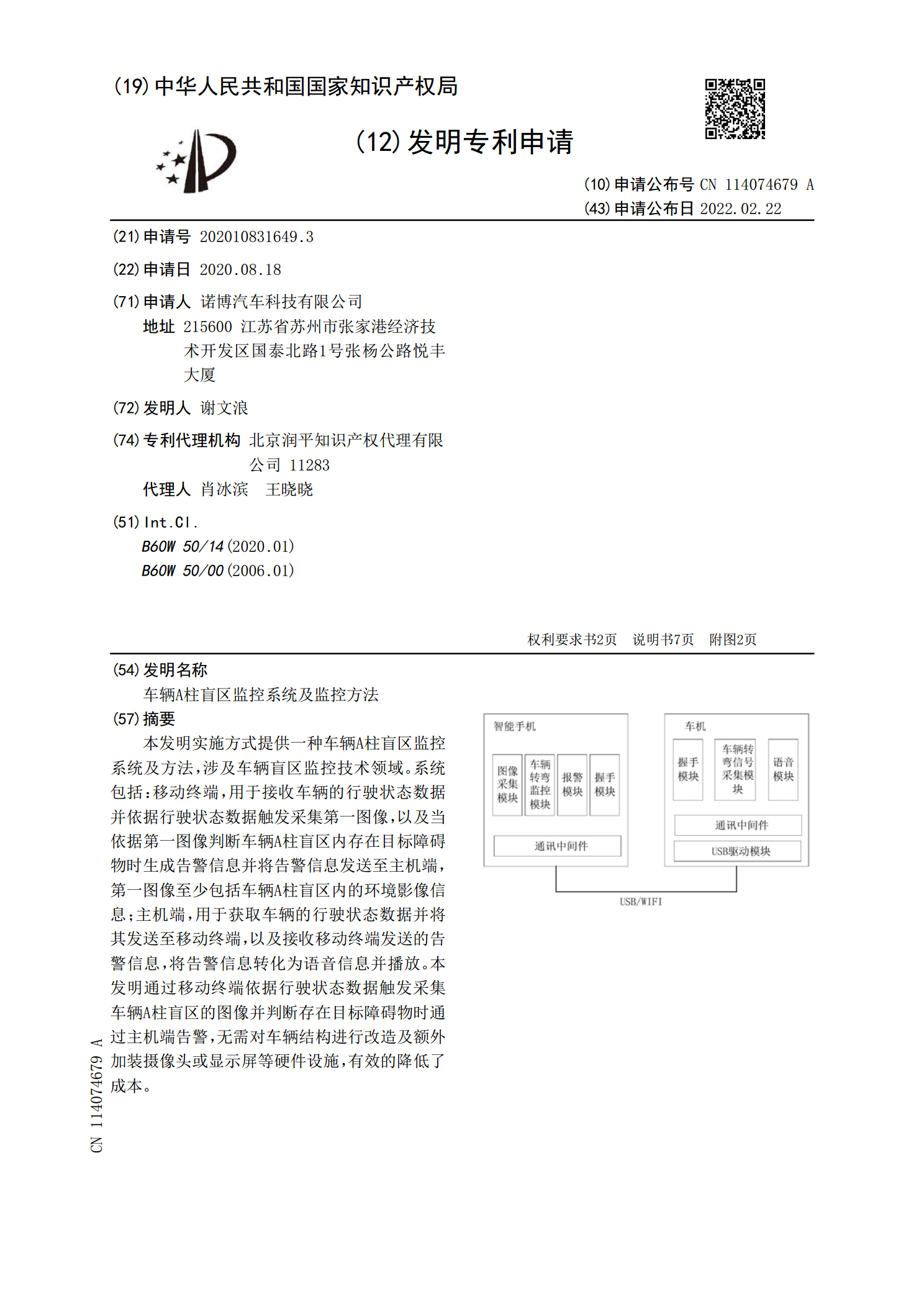
车辆A柱盲区监控系统及监控方法.pdf
本发明实施方式提供一种车辆A柱盲区监控系统及方法,涉及车辆盲区监控技术领域。系统包括:移动终端,用于接收车辆的行驶状态数据并依据行驶状态数据触发采集第一图像,以及当依据第一图像判断车辆A柱盲区内存在目标障碍物时生成告警信息并将告警信息发送至主机端,第一图像至少包括车辆A柱盲区内的环境影像信息;主机端,用于获取车辆的行驶状态数据并将其发送至移动终端,以及接收移动终端发送的告警信息,将告警信息转化为语音信息并播放。本发明通过移动终端依据行驶状态数据触发采集车辆A柱盲区的图像并判断存在目标障碍物时通过主机端告警