
车辆A柱盲区监控系统及监控方法.pdf

沛芹****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆A柱盲区监控系统及监控方法.pdf
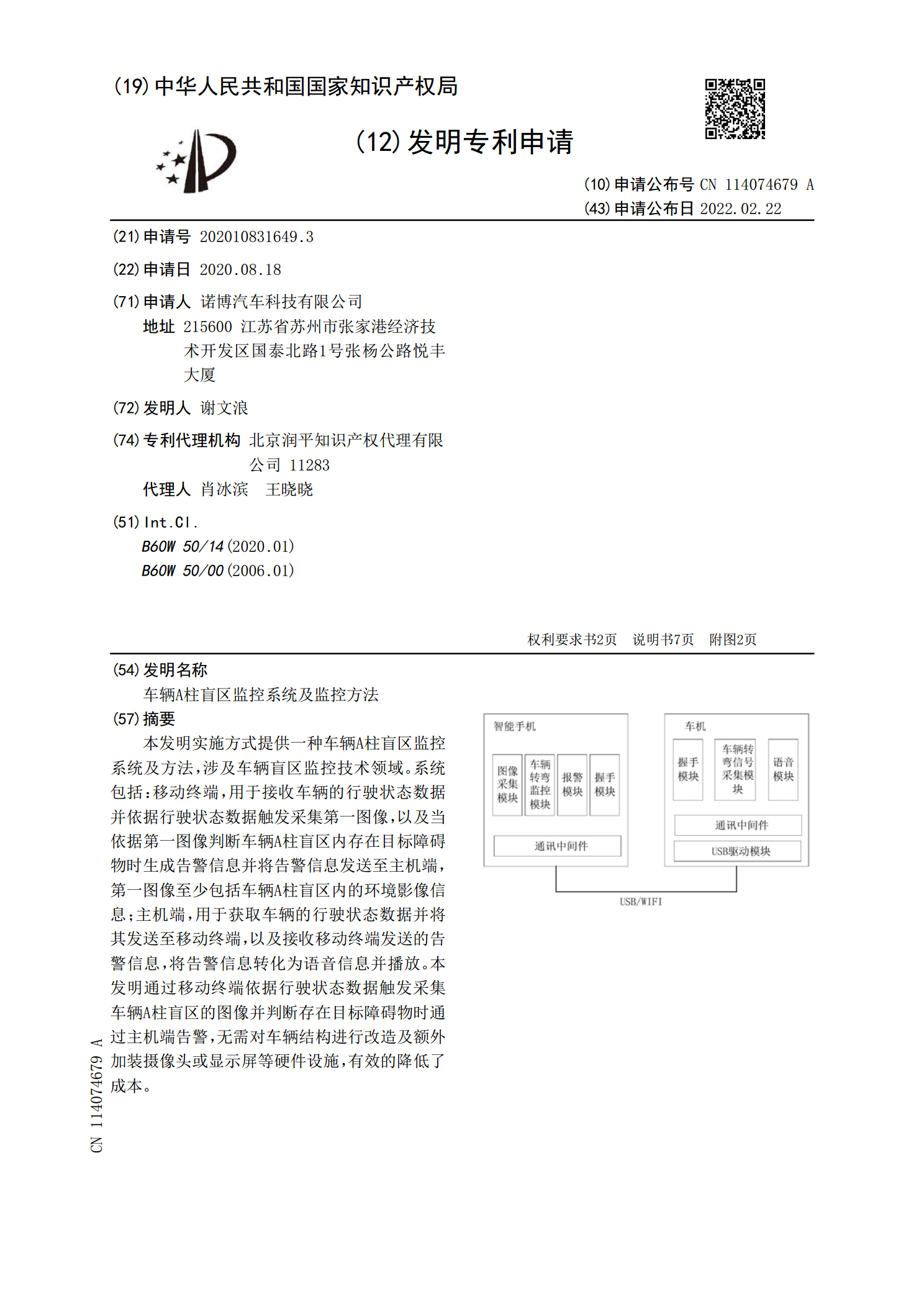
本发明实施方式提供一种车辆A柱盲区监控系统及方法,涉及车辆盲区监控技术领域。系统包括:移动终端,用于接收车辆的行驶状态数据并依据行驶状态数据触发采集第一图像,以及当依据第一图像判断车辆A柱盲区内存在目标障碍物时生成告警信息并将告警信息发送至主机端,第一图像至少包括车辆A柱盲区内的环境影像信息;主机端,用于获取车辆的行驶状态数据并将其发送至移动终端,以及接收移动终端发送的告警信息,将告警信息转化为语音信息并播放。本发明通过移动终端依据行驶状态数据触发采集车辆A柱盲区的图像并判断存在目标障碍物时通过主机端告警
车辆盲区的监控方法、系统及车辆.pdf
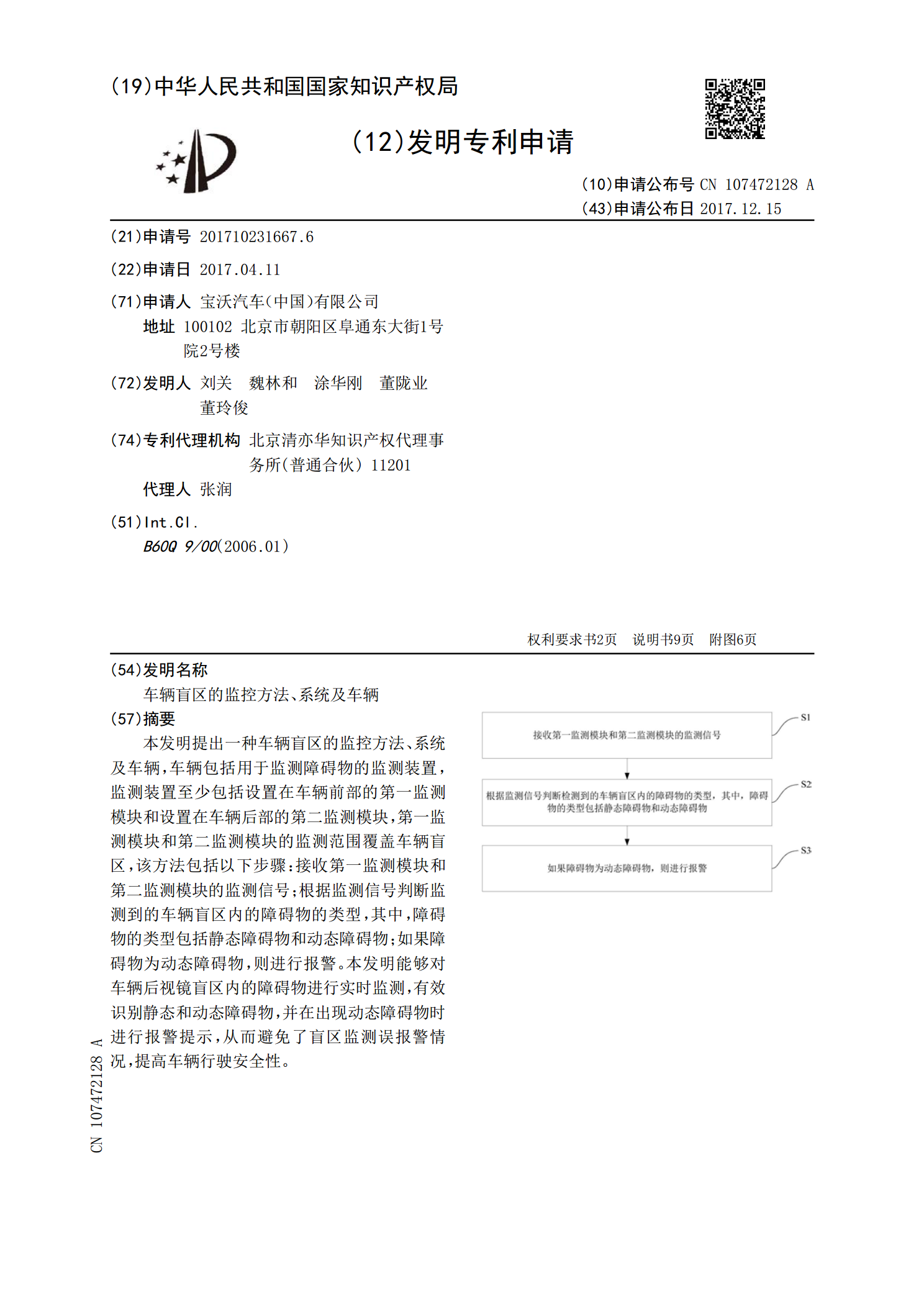
本发明提出一种车辆盲区的监控方法、系统及车辆,车辆包括用于监测障碍物的监测装置,监测装置至少包括设置在车辆前部的第一监测模块和设置在车辆后部的第二监测模块,第一监测模块和第二监测模块的监测范围覆盖车辆盲区,该方法包括以下步骤:接收第一监测模块和第二监测模块的监测信号;根据监测信号判断监测到的车辆盲区内的障碍物的类型,其中,障碍物的类型包括静态障碍物和动态障碍物;如果障碍物为动态障碍物,则进行报警。本发明能够对车辆后视镜盲区内的障碍物进行实时监测,有效识别静态和动态障碍物,并在出现动态障碍物时进行报警提示,
车辆盲区监控系统及控制方法.pdf
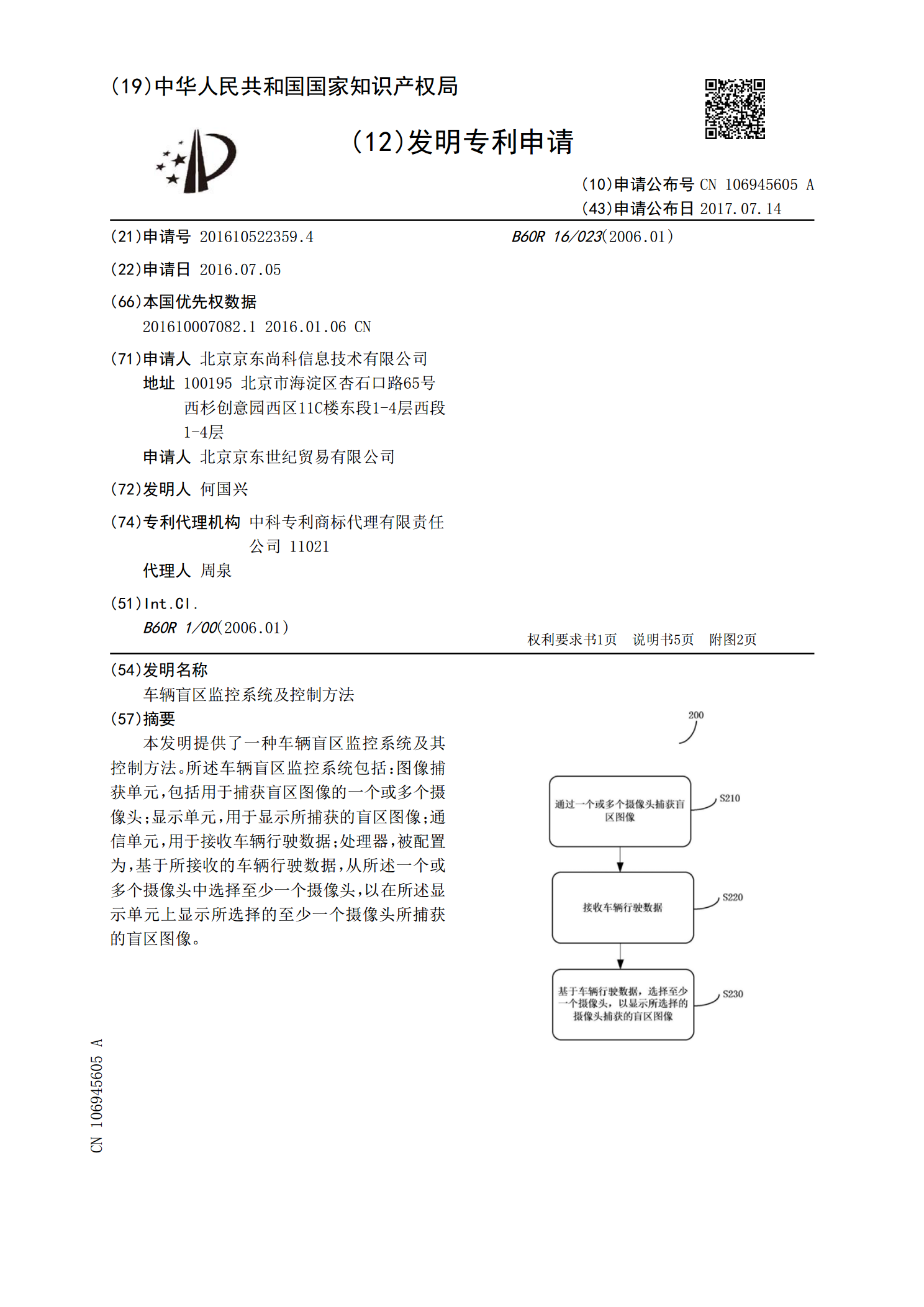
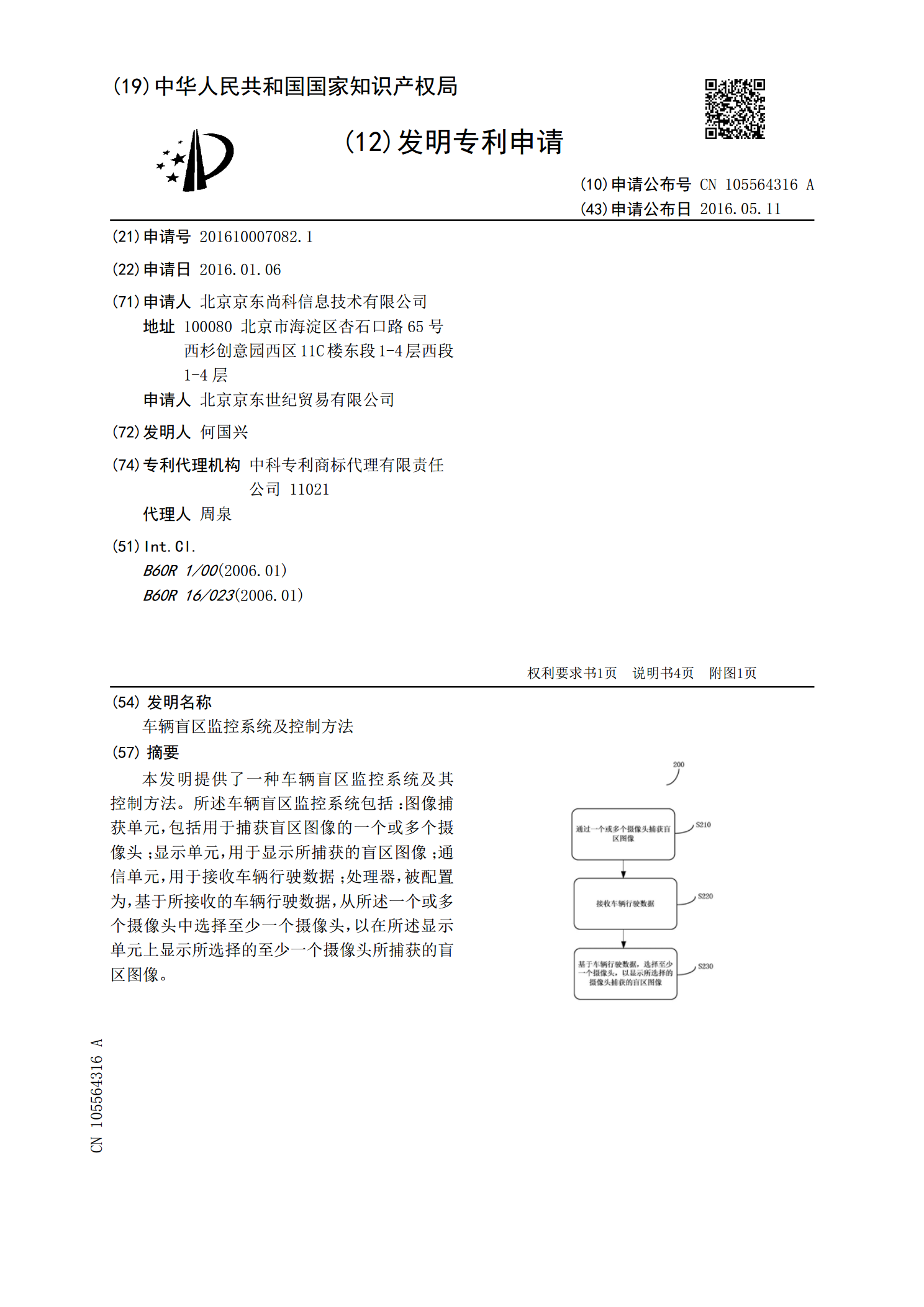
本发明提供了一种车辆盲区监控系统及其控制方法。所述车辆盲区监控系统包括:图像捕获单元,包括用于捕获盲区图像的一个或多个摄像头;显示单元,用于显示所捕获的盲区图像;通信单元,用于接收车辆行驶数据;处理器,被配置为,基于所接收的车辆行驶数据,从所述一个或多个摄像头中选择至少一个摄像头,以在所述显示单元上显示所选择的至少一个摄像头所捕获的盲区图像。
车辆盲区监控系统及控制方法.pdf
本发明提供了一种车辆盲区监控系统及其控制方法。所述车辆盲区监控系统包括:图像捕获单元,包括用于捕获盲区图像的一个或多个摄像头;显示单元,用于显示所捕获的盲区图像;通信单元,用于接收车辆行驶数据;处理器,被配置为,基于所接收的车辆行驶数据,从所述一个或多个摄像头中选择至少一个摄像头,以在所述显示单元上显示所选择的至少一个摄像头所捕获的盲区图像。
车辆无盲区行驶安全监控系统.pdf
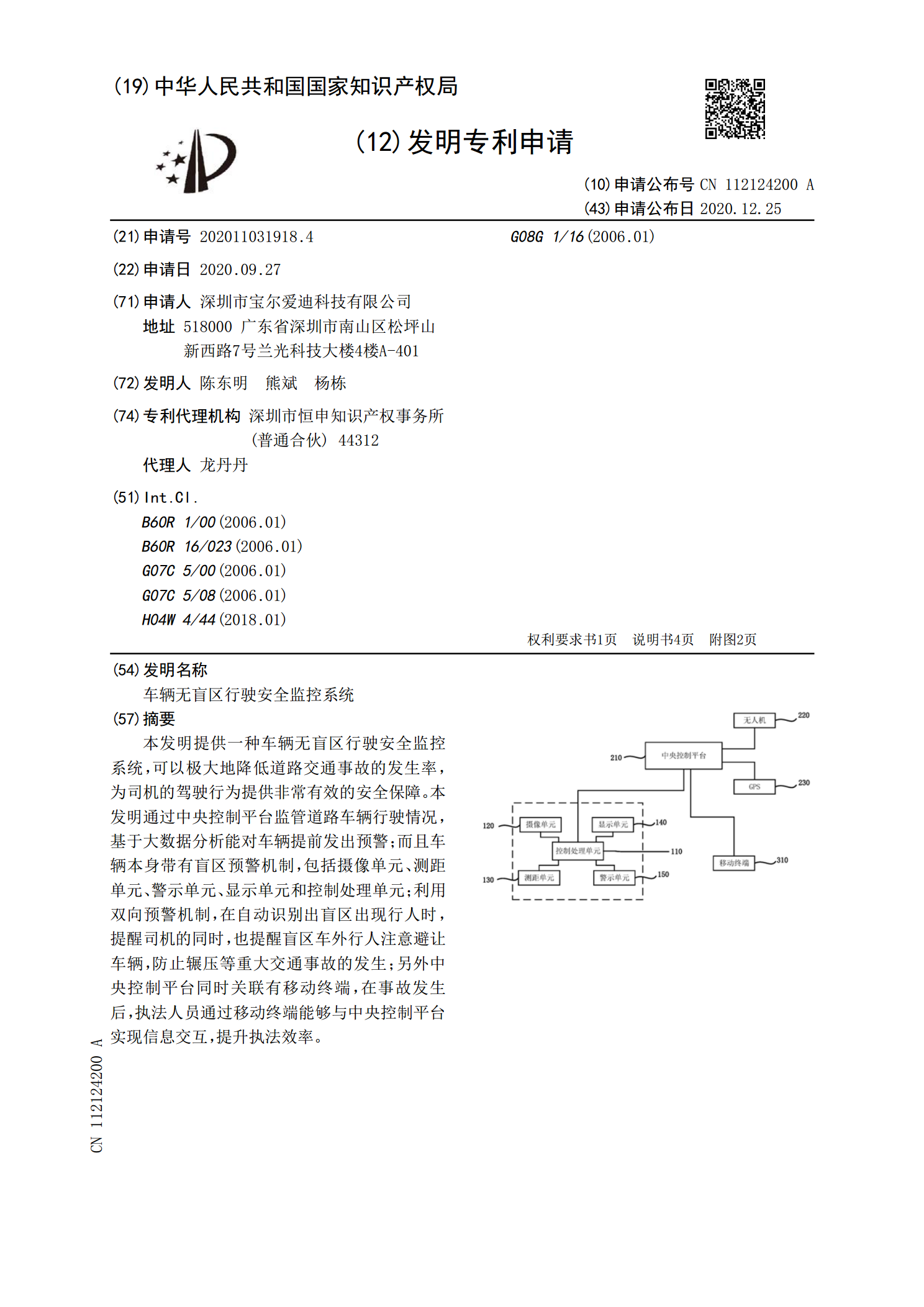
本发明提供一种车辆无盲区行驶安全监控系统,可以极大地降低道路交通事故的发生率,为司机的驾驶行为提供非常有效的安全保障。本发明通过中央控制平台监管道路车辆行驶情况,基于大数据分析能对车辆提前发出预警;而且车辆本身带有盲区预警机制,包括摄像单元、测距单元、警示单元、显示单元和控制处理单元;利用双向预警机制,在自动识别出盲区出现行人时,提醒司机的同时,也提醒盲区车外行人注意避让车辆,防止辗压等重大交通事故的发生;另外中央控制平台同时关联有移动终端,在事故发生后,执法人员通过移动终端能够与中央控制平台实现信息交互