
一种车辆后视镜的随动控制方法、系统、装置.pdf

一吃****书竹

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车辆后视镜的随动控制方法、系统、装置.pdf
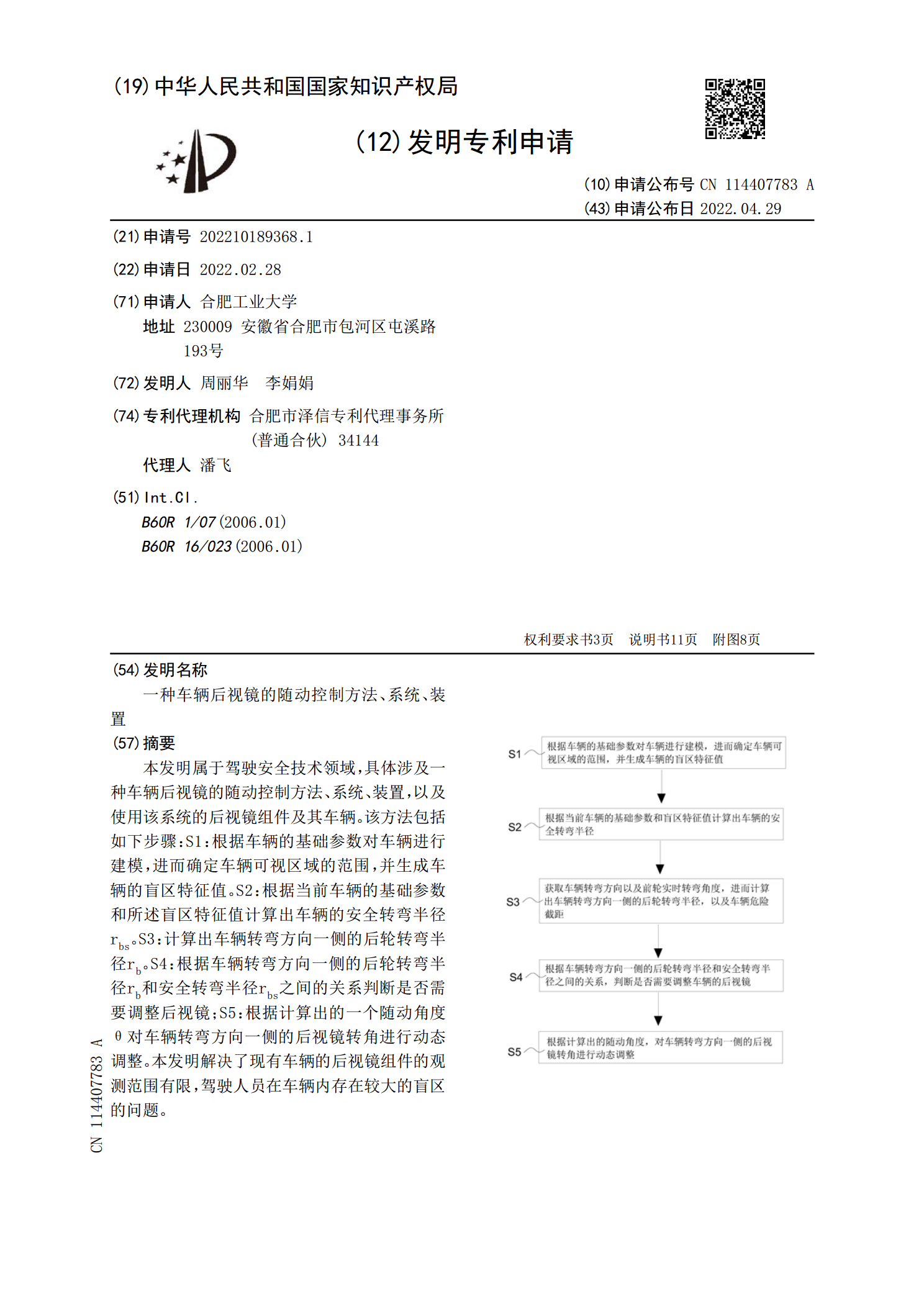
本发明属于驾驶安全技术领域,具体涉及一种车辆后视镜的随动控制方法、系统、装置,以及使用该系统的后视镜组件及其车辆。该方法包括如下步骤:S1:根据车辆的基础参数对车辆进行建模,进而确定车辆可视区域的范围,并生成车辆的盲区特征值。S2:根据当前车辆的基础参数和所述盲区特征值计算出车辆的安全转弯半径r
汽车后视镜的随动方法及汽车随动后视镜.pdf
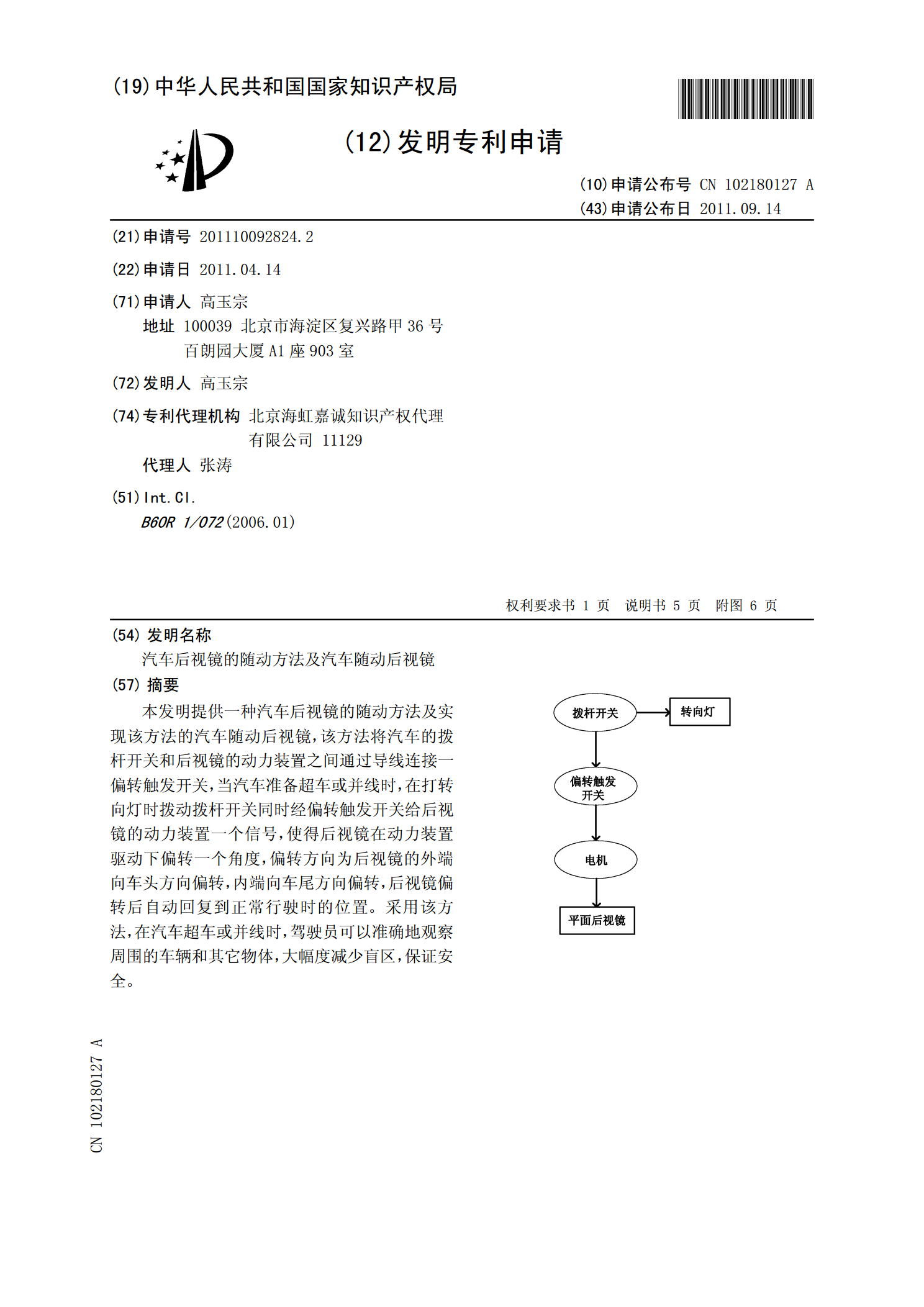
本发明提供一种汽车后视镜的随动方法及实现该方法的汽车随动后视镜,该方法将汽车的拨杆开关和后视镜的动力装置之间通过导线连接一偏转触发开关,当汽车准备超车或并线时,在打转向灯时拨动拨杆开关同时经偏转触发开关给后视镜的动力装置一个信号,使得后视镜在动力装置驱动下偏转一个角度,偏转方向为后视镜的外端向车头方向偏转,内端向车尾方向偏转,后视镜偏转后自动回复到正常行驶时的位置。采用该方法,在汽车超车或并线时,驾驶员可以准确地观察周围的车辆和其它物体,大幅度减少盲区,保证安全。
一种用于车辆的随动外后视镜.pdf
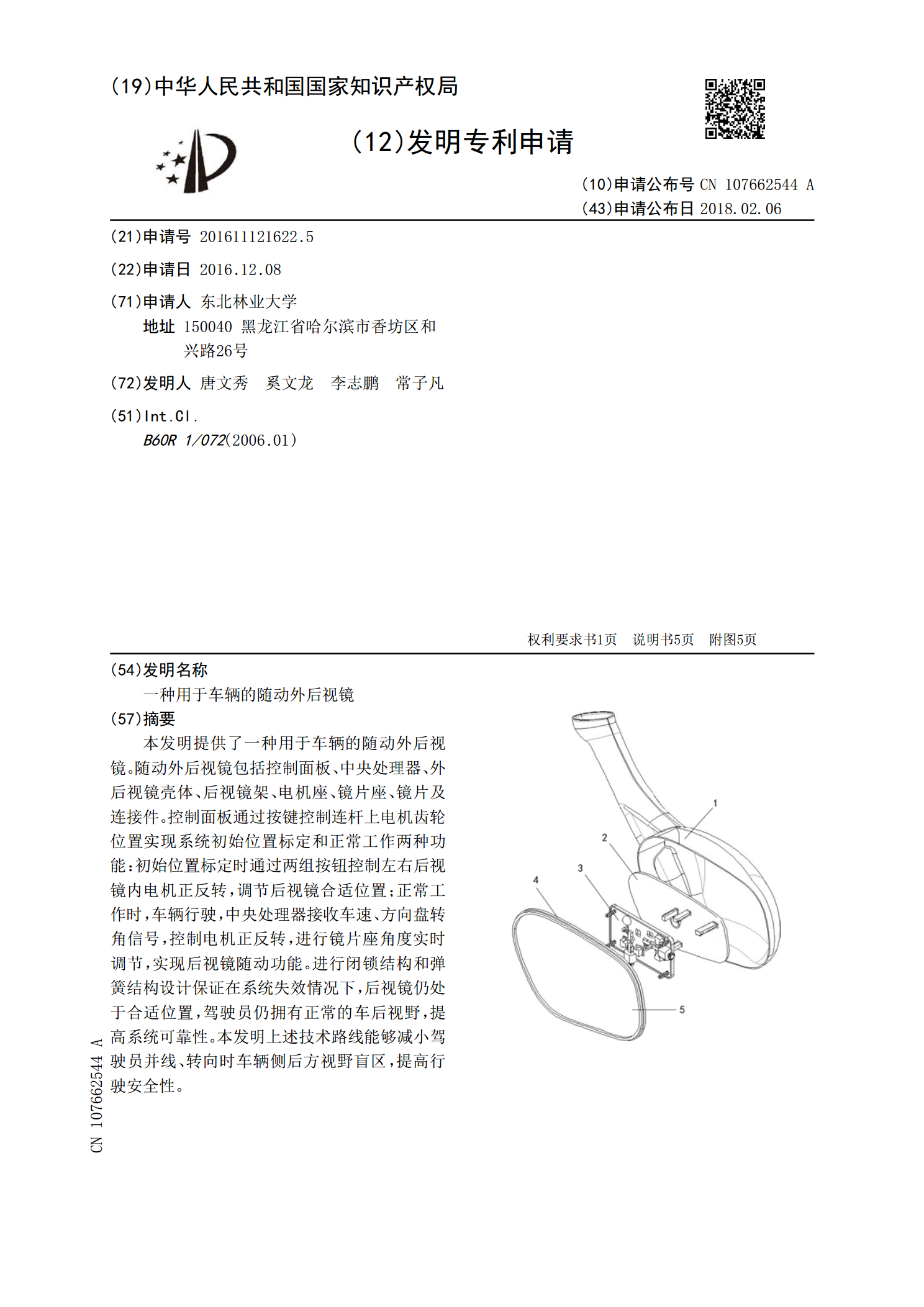
本发明提供了一种用于车辆的随动外后视镜。随动外后视镜包括控制面板、中央处理器、外后视镜壳体、后视镜架、电机座、镜片座、镜片及连接件。控制面板通过按键控制连杆上电机齿轮位置实现系统初始位置标定和正常工作两种功能:初始位置标定时通过两组按钮控制左右后视镜内电机正反转,调节后视镜合适位置;正常工作时,车辆行驶,中央处理器接收车速、方向盘转角信号,控制电机正反转,进行镜片座角度实时调节,实现后视镜随动功能。进行闭锁结构和弹簧结构设计保证在系统失效情况下,后视镜仍处于合适位置,驾驶员仍拥有正常的车后视野,提高系统可

后轮随动转向系统的控制方法、装置、系统和车辆.pdf
本公开涉及一种后轮随动转向系统的控制方法、装置、系统和车辆,该方法应用于车辆,包括:获取开关信号,开关信号用于控制车辆的后轮随动转向系统的工作状态,后轮随动转向系统的工作状态包括开启状态和关闭状态,当车辆的方向盘状态为回正状态时,控制车辆的后轮回正,当后轮回正时,根据开关信号控制后轮随动转向系统的工作状态。能够提高后轮随动转向系统的安全性和稳定性。
一种汽车后视镜转向随动系统.pdf
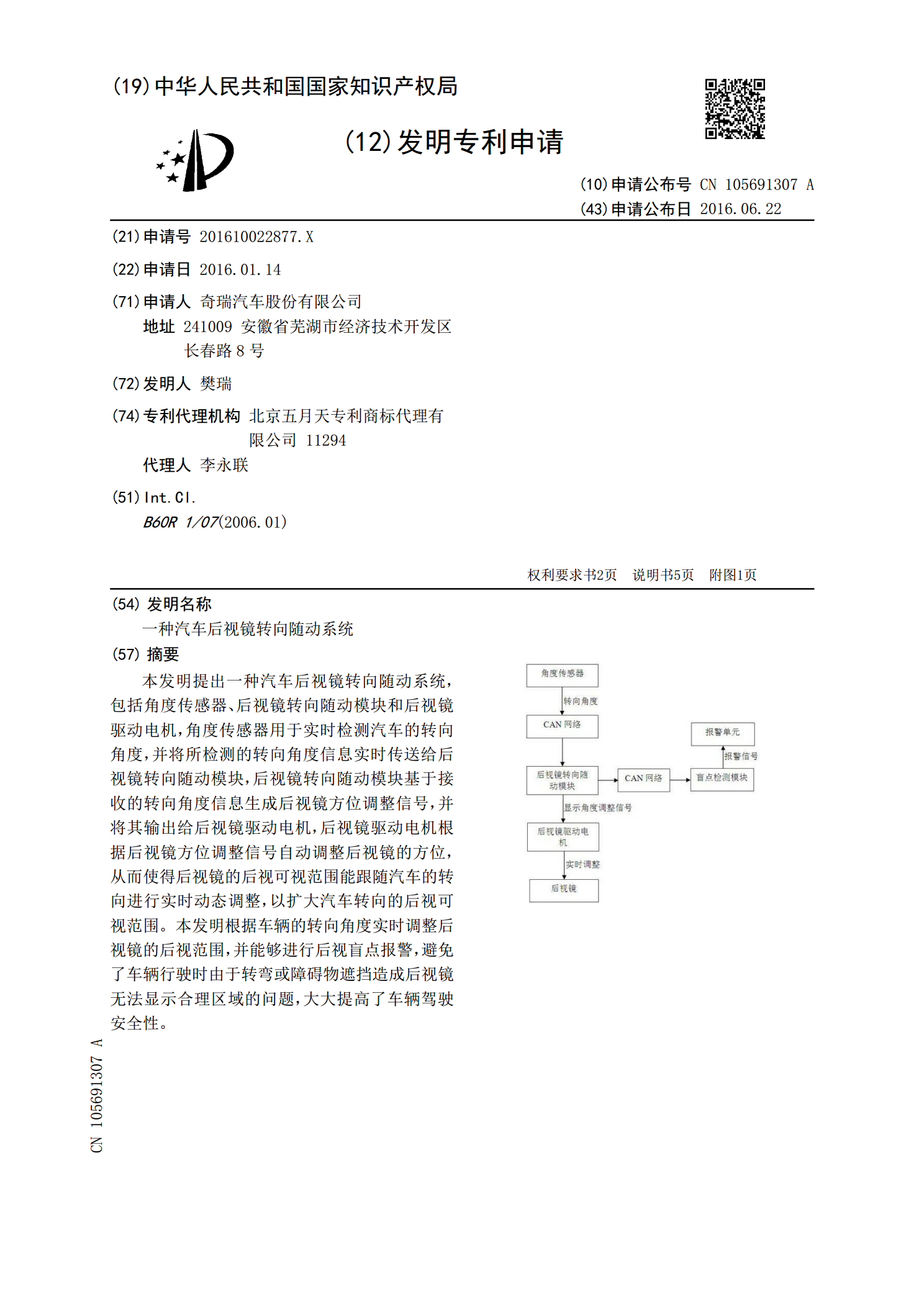
本发明提出一种汽车后视镜转向随动系统,包括角度传感器、后视镜转向随动模块和后视镜驱动电机,角度传感器用于实时检测汽车的转向角度,并将所检测的转向角度信息实时传送给后视镜转向随动模块,后视镜转向随动模块基于接收的转向角度信息生成后视镜方位调整信号,并将其输出给后视镜驱动电机,后视镜驱动电机根据后视镜方位调整信号自动调整后视镜的方位,从而使得后视镜的后视可视范围能跟随汽车的转向进行实时动态调整,以扩大汽车转向的后视可视范围。本发明根据车辆的转向角度实时调整后视镜的后视范围,并能够进行后视盲点报警,避免了车辆行