
一种车辆驻车控制方法及装置.pdf

宜欣****外呢

1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆驻车控制方法及装置.pdf
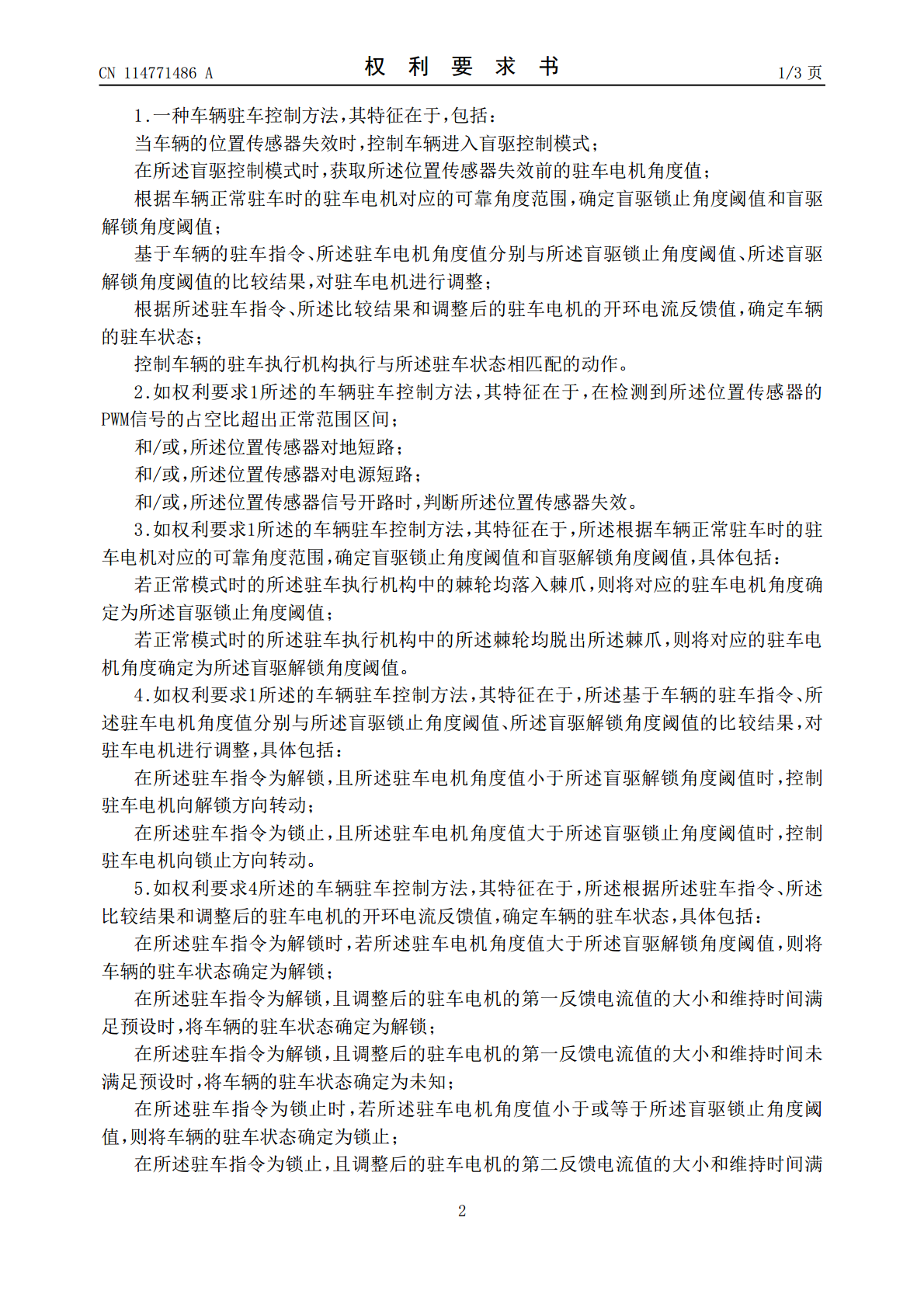
本发明公开了一种车辆驻车控制方法及装置,方法包括当车辆的位置传感器失效时控制车辆进入盲驱控制模式;在盲驱控制模式时获取所述位置传感器失效前的驻车电机角度值;确定盲驱锁止角度阈值和盲驱解锁角度阈值;基于车辆的驻车指令、驻车电机角度值分别与盲驱锁止角度阈值、盲驱解锁角度阈值的比较结果,对驻车电机进行调整;根据相关参数确定车辆的驻车状态;控制车辆的驻车执行机构执行与驻车状态相匹配的动作。本发明实施例提供的车辆驻车控制方法及装置,当位置传感器失效时控制驻车电机开环运行,基于电机反馈电流值确定车辆的驻车状态,进而执
一种车辆的DPF驻车再生控制方法及装置.pdf
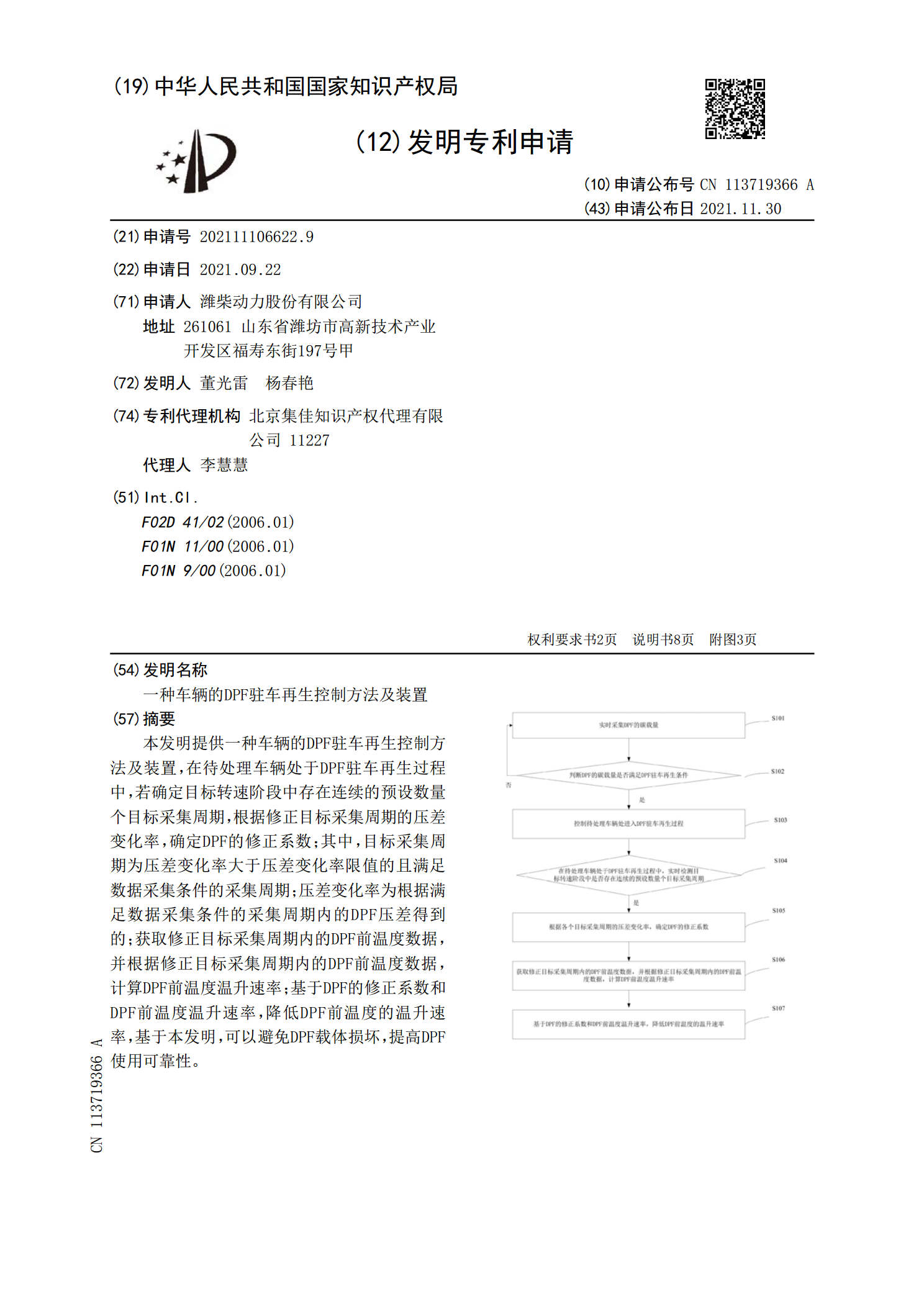
本发明提供一种车辆的DPF驻车再生控制方法及装置,在待处理车辆处于DPF驻车再生过程中,若确定目标转速阶段中存在连续的预设数量个目标采集周期,根据修正目标采集周期的压差变化率,确定DPF的修正系数;其中,目标采集周期为压差变化率大于压差变化率限值的且满足数据采集条件的采集周期;压差变化率为根据满足数据采集条件的采集周期内的DPF压差得到的;获取修正目标采集周期内的DPF前温度数据,并根据修正目标采集周期内的DPF前温度数据,计算DPF前温度温升速率;基于DPF的修正系数和DPF前温度温升速率,降低DPF前
驻车控制方法、装置、设备及车辆.pdf
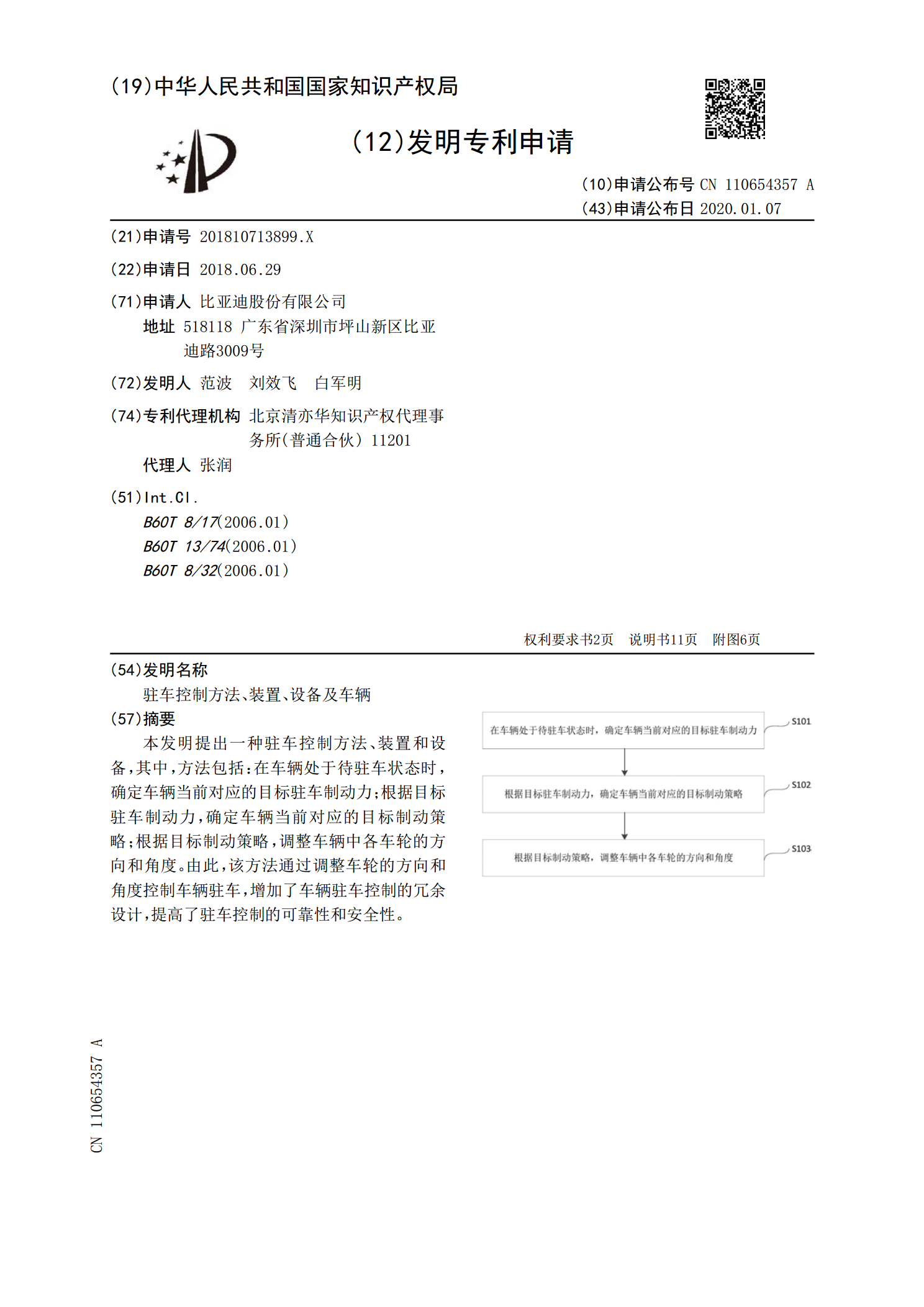
本发明提出一种驻车控制方法、装置和设备,其中,方法包括:在车辆处于待驻车状态时,确定车辆当前对应的目标驻车制动力;根据目标驻车制动力,确定车辆当前对应的目标制动策略;根据目标制动策略,调整车辆中各车轮的方向和角度。由此,该方法通过调整车轮的方向和角度控制车辆驻车,增加了车辆驻车控制的冗余设计,提高了驻车控制的可靠性和安全性。

一种用于防止车辆驻车溜车的控制装置及其方法.pdf
本发明提供了一种用于防止车辆驻车溜车的控制装置及其方法,属于汽车技术领域。它解决了现有的防止车辆溜车的装置安全性不高、无法及时阻止汽车移动等问题。本用于防止车辆驻车溜车的控制装置包括中央处理器、用于检测发动机转速的发动机转速传感器、用于检测汽车移动速度的车速检测器以及用于锁死车轮转动的锁紧机构,发动机转速传感器、车速检测器以及锁紧机构均与上述中央处理器相连接,当发动机转速传感器将发动机停止转动的信号发送给中央处理器且车速检测器检测到汽车移动速度不为零时,中央处理器向锁紧机构发送控制信号以控制其锁死车轮。本
车辆驻车控制方法、控制装置、控制系统及车辆.pdf
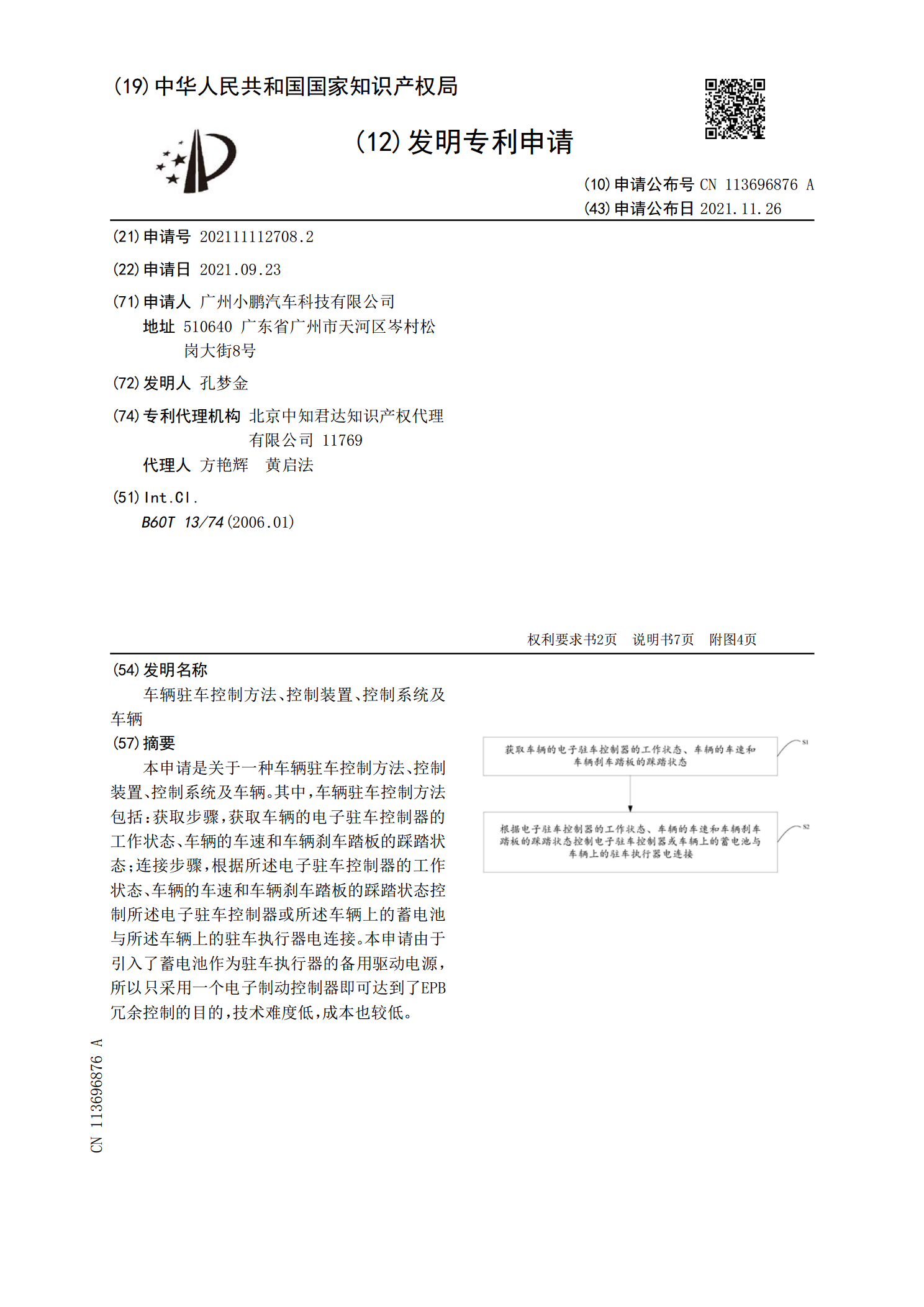
本申请是关于一种车辆驻车控制方法、控制装置、控制系统及车辆。其中,车辆驻车控制方法包括:获取步骤,获取车辆的电子驻车控制器的工作状态、车辆的车速和车辆刹车踏板的踩踏状态;连接步骤,根据所述电子驻车控制器的工作状态、车辆的车速和车辆刹车踏板的踩踏状态控制所述电子驻车控制器或所述车辆上的蓄电池与所述车辆上的驻车执行器电连接。本申请由于引入了蓄电池作为驻车执行器的备用驱动电源,所以只采用一个电子制动控制器即可达到了EPB冗余控制的目的,技术难度低,成本也较低。