
基于云台角度调整的无人车控制方法及装置.pdf

琰琬****买买

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于云台角度调整的无人车控制方法及装置.pdf
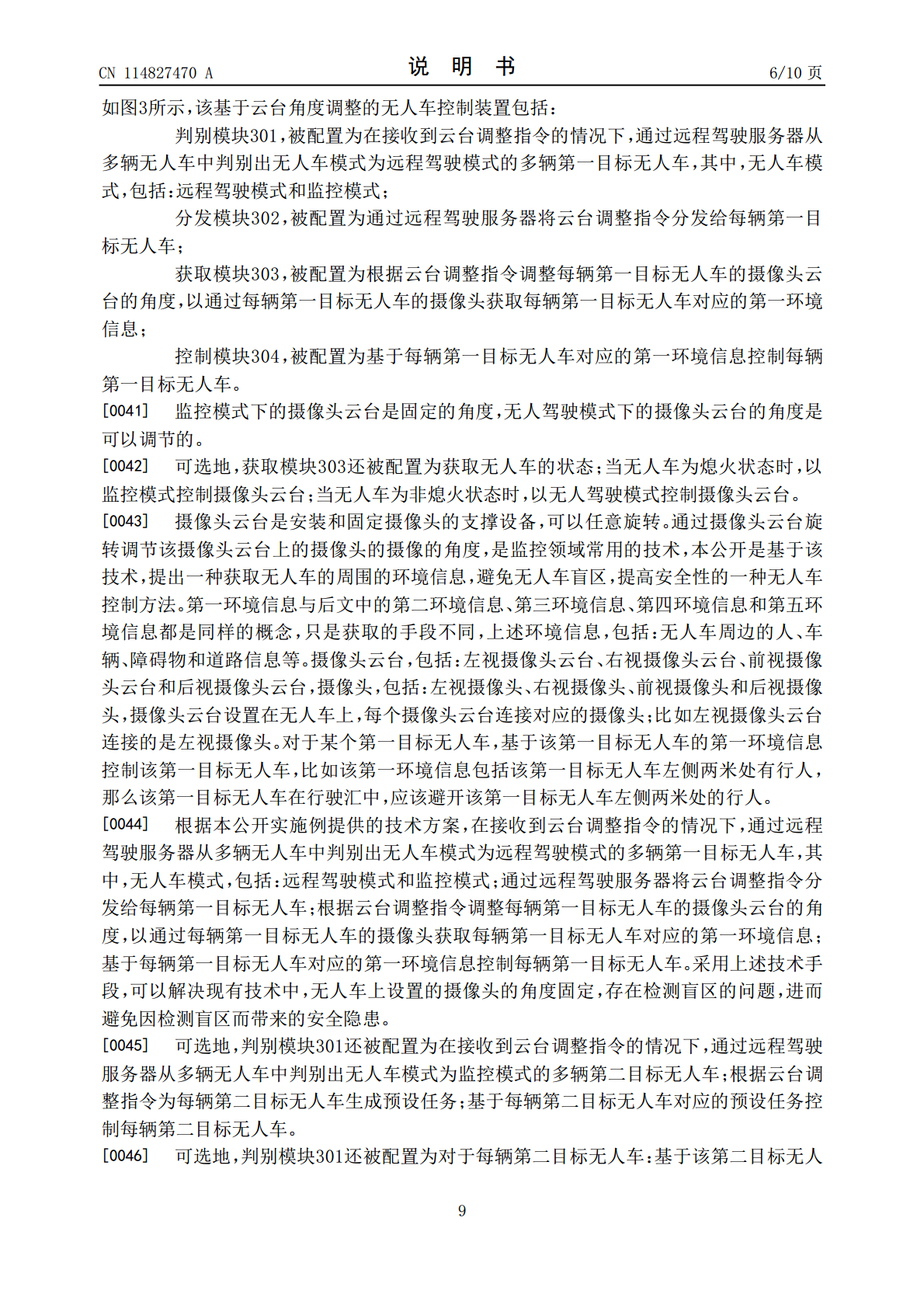
本公开涉及无人驾驶技术领域,提供了基于云台角度调整的无人车控制方法及装置。该方法包括:在接收到云台调整指令的情况下,通过远程驾驶服务器从多辆无人车中判别出无人车模式为远程驾驶模式的多辆第一目标无人车;通过远程驾驶服务器将云台调整指令分发给每辆第一目标无人车;根据云台调整指令调整每辆第一目标无人车的摄像头云台的角度,以通过每辆第一目标无人车的摄像头获取每辆第一目标无人车对应的第一环境信息;基于每辆第一目标无人车对应的第一环境信息控制每辆第一目标无人车。采用上述技术手段,解决现有技术中,无人车上设置的摄像头的
无人车控制方法、装置、存储介质及无人车.pdf
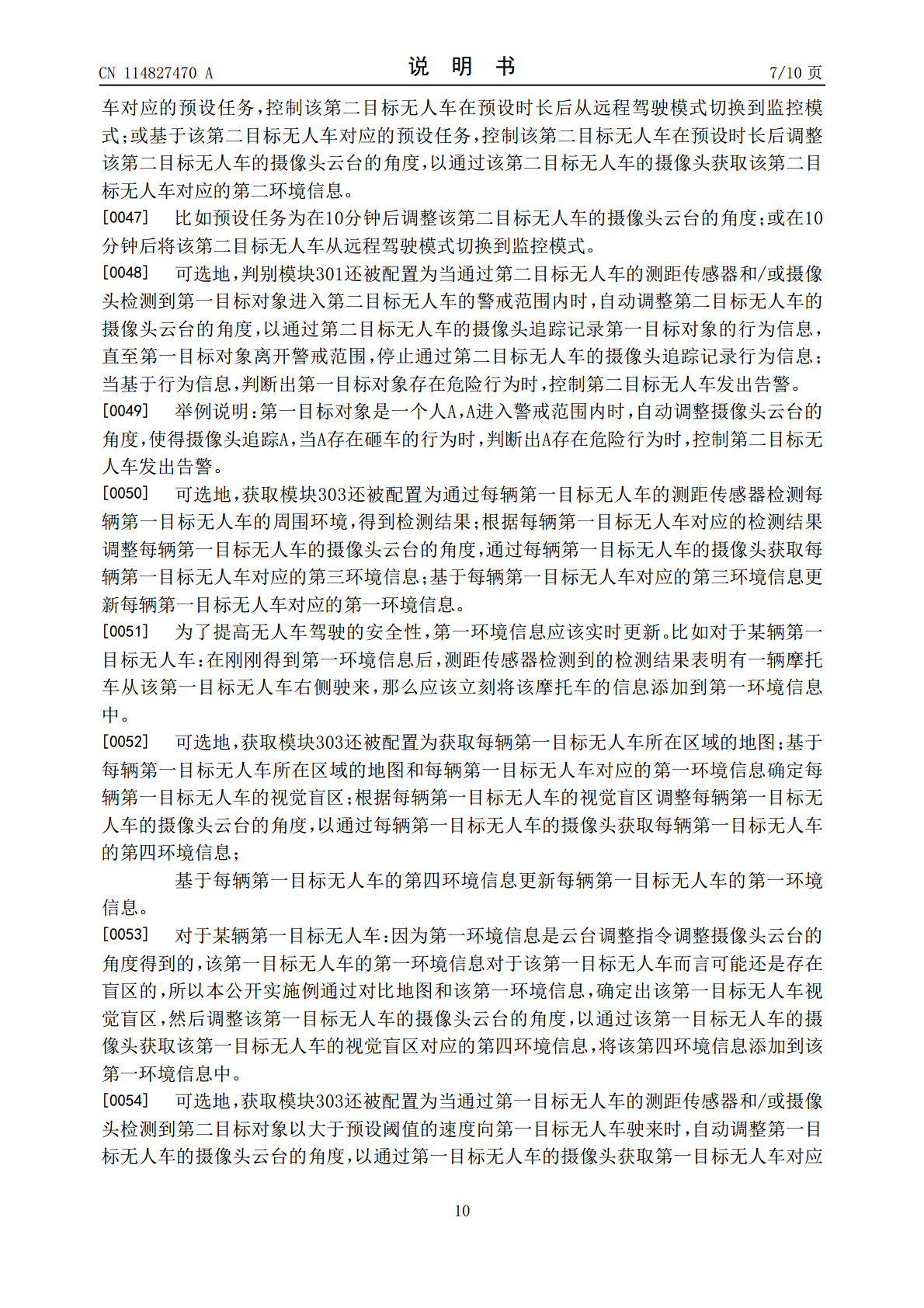
本公开涉及一种无人车控制方法、装置、存储介质及无人车。该方法包括:获取无人车的运行状态数据;在根据所述运行状态数据确定所述无人车存在运行故障的情况下,根据所述运行状态数据检测得到所述运行故障包括的故障类型;基于各所述故障类型之间的优先级关系,确定优先级最高的目标故障类型;执行所述目标故障类型对应的预设故障处理逻辑,以控制所述无人车从所述运行故障的状态中恢复。采用本公开的这种方法,可提升无人车从故障中恢复的效率。
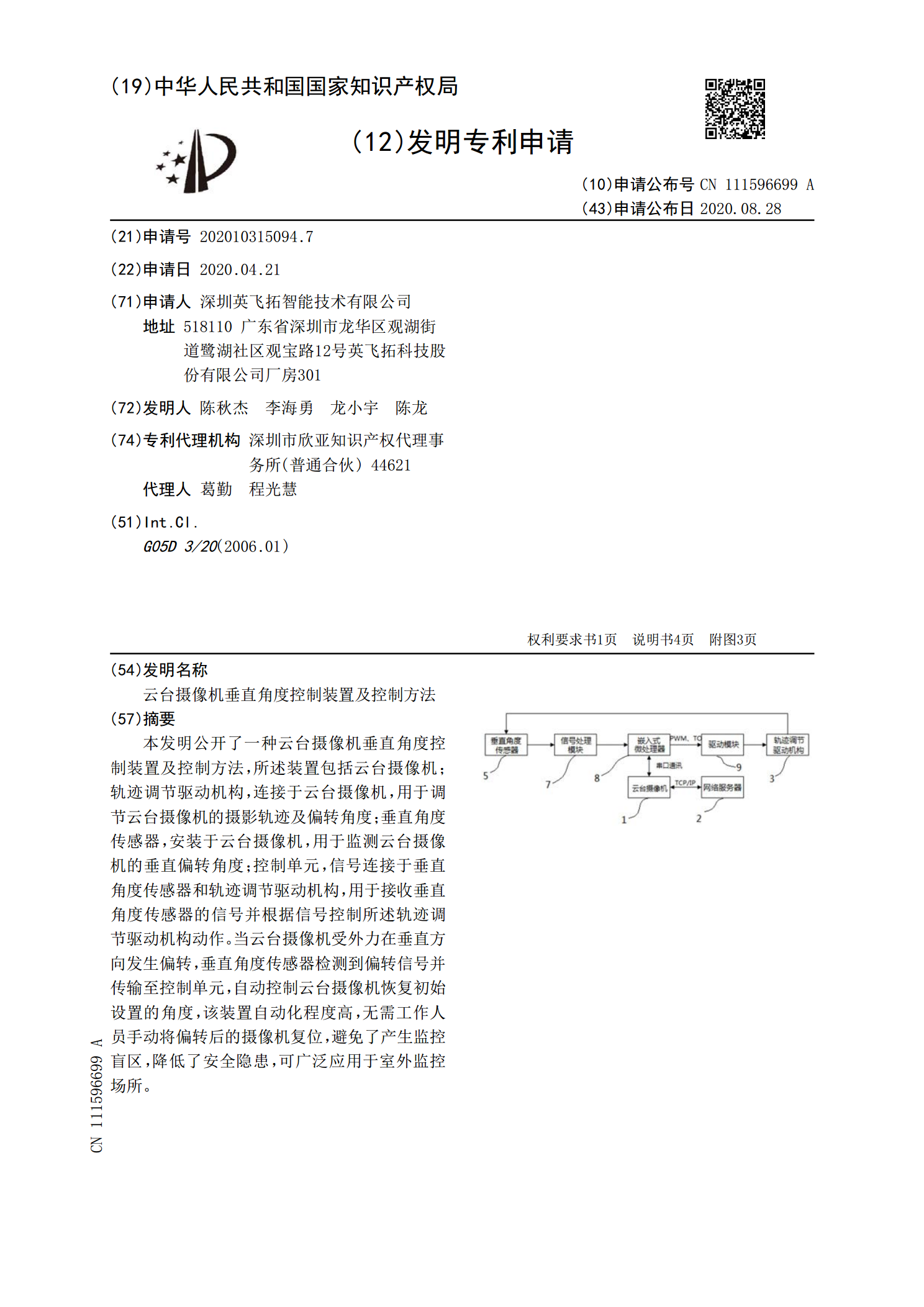
云台摄像机垂直角度控制装置及控制方法.pdf
本发明公开了一种云台摄像机垂直角度控制装置及控制方法,所述装置包括云台摄像机;轨迹调节驱动机构,连接于云台摄像机,用于调节云台摄像机的摄影轨迹及偏转角度;垂直角度传感器,安装于云台摄像机,用于监测云台摄像机的垂直偏转角度;控制单元,信号连接于垂直角度传感器和轨迹调节驱动机构,用于接收垂直角度传感器的信号并根据信号控制所述轨迹调节驱动机构动作。当云台摄像机受外力在垂直方向发生偏转,垂直角度传感器检测到偏转信号并传输至控制单元,自动控制云台摄像机恢复初始设置的角度,该装置自动化程度高,无需工作人员手动将偏转后
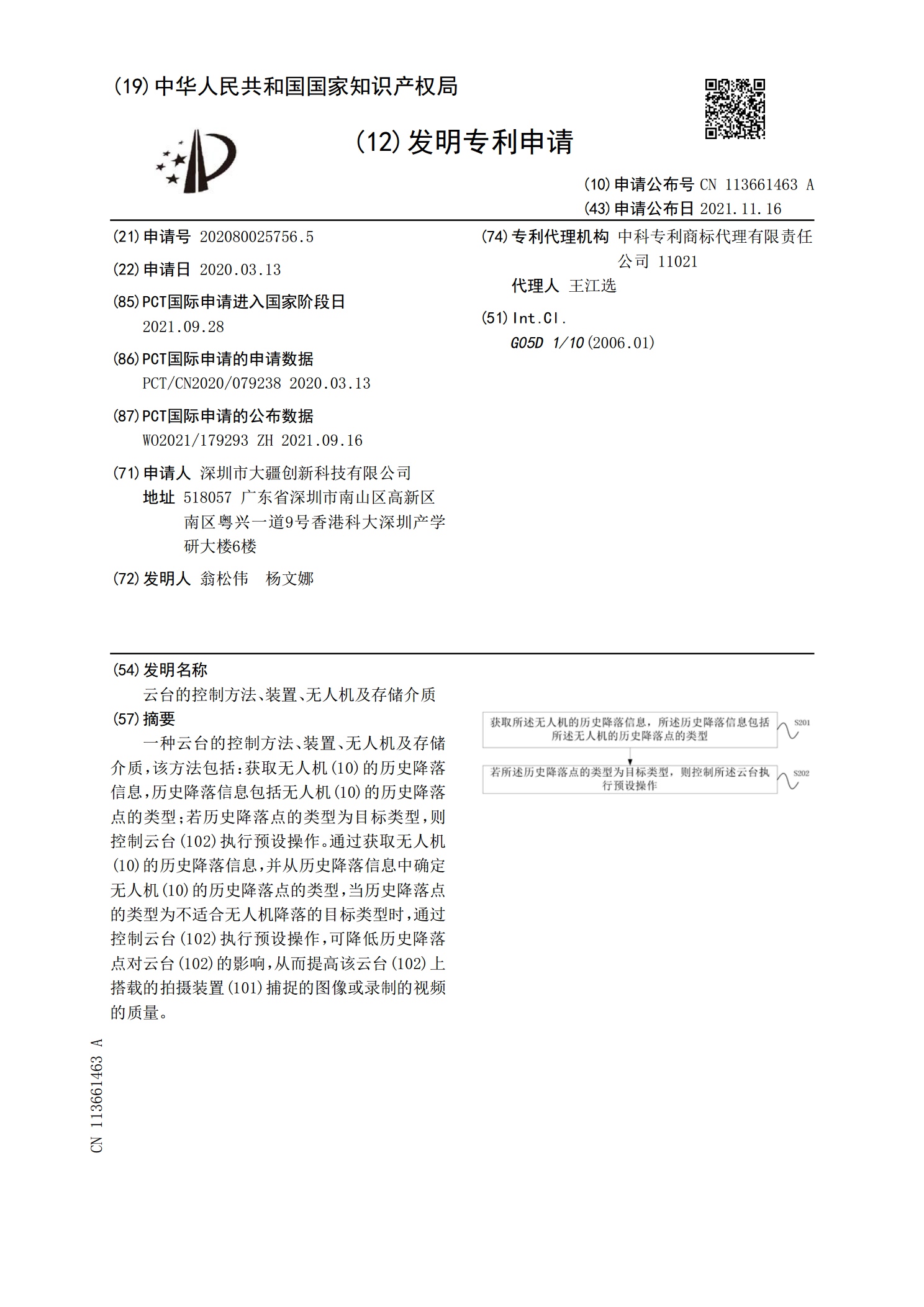
云台的控制方法、装置、无人机及存储介质.pdf
一种云台的控制方法、装置、无人机及存储介质,该方法包括:获取无人机(10)的历史降落信息,历史降落信息包括无人机(10)的历史降落点的类型;若历史降落点的类型为目标类型,则控制云台(102)执行预设操作。通过获取无人机(10)的历史降落信息,并从历史降落信息中确定无人机(10)的历史降落点的类型,当历史降落点的类型为不适合无人机降落的目标类型时,通过控制云台(102)执行预设操作,可降低历史降落点对云台(102)的影响,从而提高该云台(102)上搭载的拍摄装置(101)捕捉的图像或录制的视频的质量。
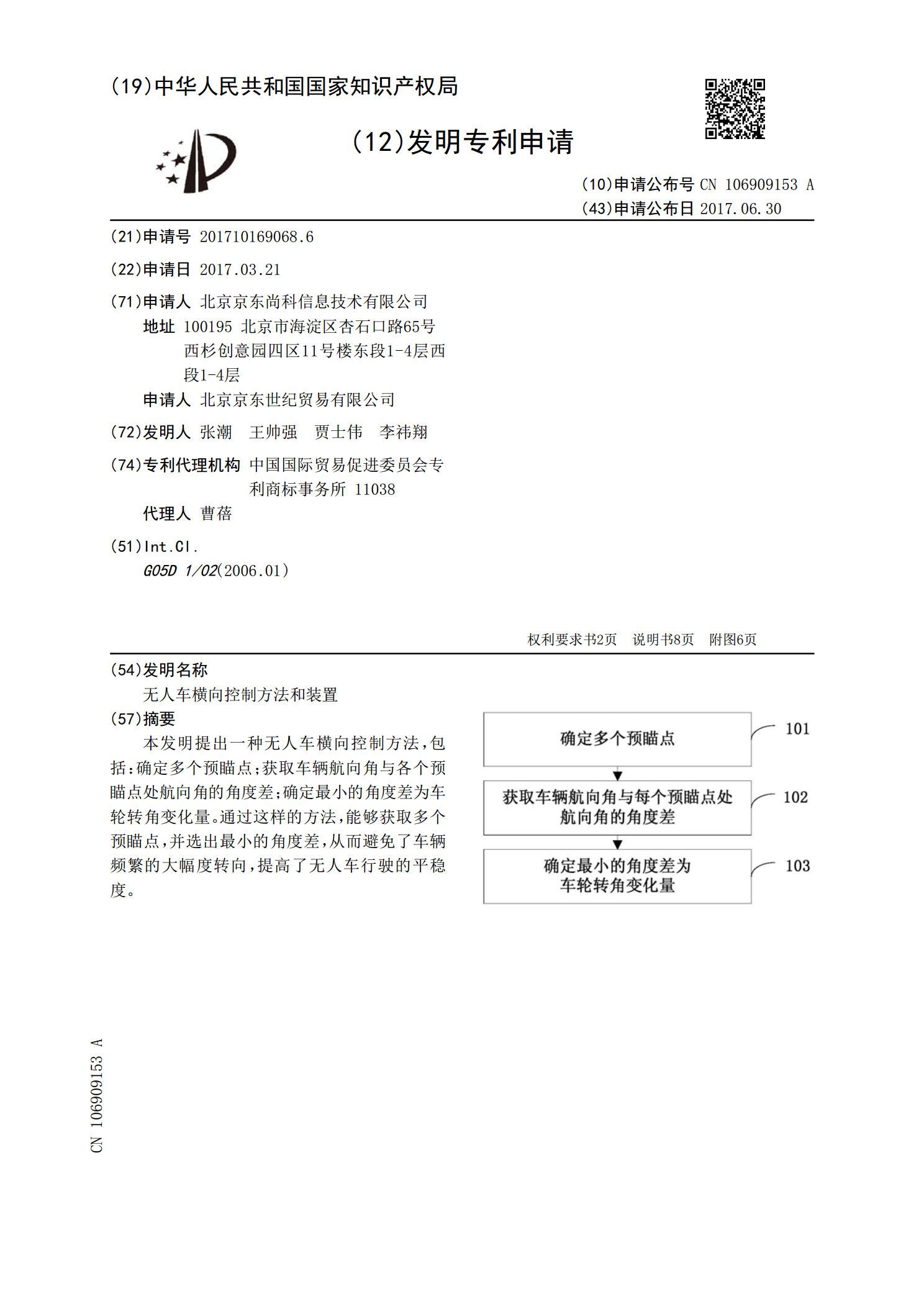
无人车横向控制方法和装置.pdf
本发明提出一种无人车横向控制方法,包括:确定多个预瞄点;获取车辆航向角与各个预瞄点处航向角的角度差;确定最小的角度差为车轮转角变化量。通过这样的方法,能够获取多个预瞄点,并选出最小的角度差,从而避免了车辆频繁的大幅度转向,提高了无人车行驶的平稳度。