
云台摄像机垂直角度控制装置及控制方法.pdf

思洁****爱吗

1/9

2/9

3/9

4/9

5/9
6/9
7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
云台摄像机垂直角度控制装置及控制方法.pdf
本发明公开了一种云台摄像机垂直角度控制装置及控制方法,所述装置包括云台摄像机;轨迹调节驱动机构,连接于云台摄像机,用于调节云台摄像机的摄影轨迹及偏转角度;垂直角度传感器,安装于云台摄像机,用于监测云台摄像机的垂直偏转角度;控制单元,信号连接于垂直角度传感器和轨迹调节驱动机构,用于接收垂直角度传感器的信号并根据信号控制所述轨迹调节驱动机构动作。当云台摄像机受外力在垂直方向发生偏转,垂直角度传感器检测到偏转信号并传输至控制单元,自动控制云台摄像机恢复初始设置的角度,该装置自动化程度高,无需工作人员手动将偏转后

云台摄像机、云台摄像机的追踪控制方法、装置及设备.pdf
提供一种云台摄像机、云台摄像机的追踪控制方法、装置及设备。在目标对象符合预设规则或者接收到用户指示的追踪目标对象的指令时,分析目标对象在当前帧图像中的位置与当前帧图像的目标位置之间的误差值,可获知目标对象的运动姿态变化。且分析目标对象在当前帧图像和当前帧图像之前的任意一帧图像之间的误差距离变化值,可获知目标对象的相对空间位置,从而多维度的分析出目标对象当前的速度变化情况,解算出目标对象与云台摄像机支架的空间位置,通过精准对摄像机本体的拍摄角度进行调整,及时修正了目标对象在后续帧图像中的位置,使得目标对象始
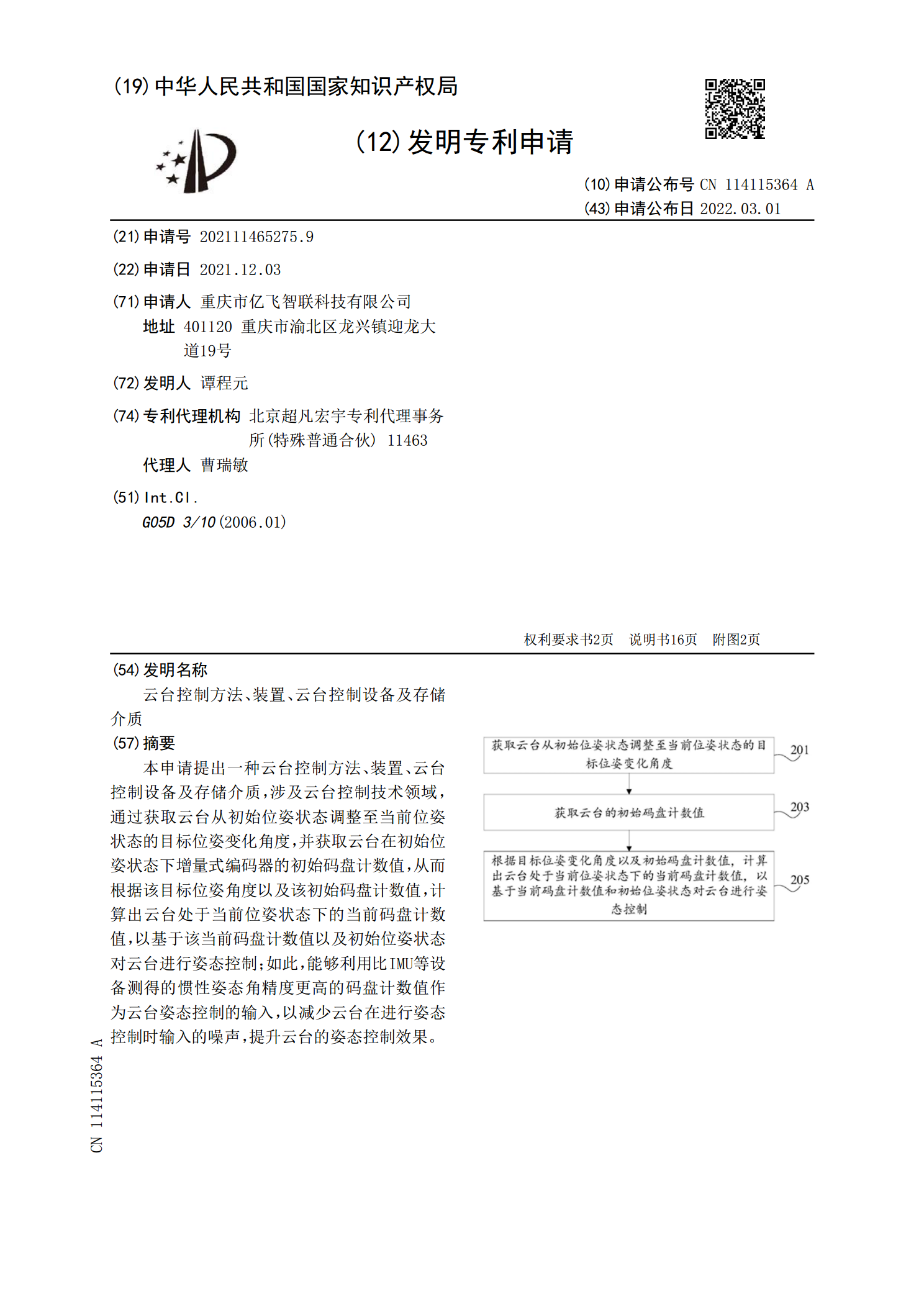
云台控制方法、装置、云台控制设备及存储介质.pdf
本申请提出一种云台控制方法、装置、云台控制设备及存储介质,涉及云台控制技术领域,通过获取云台从初始位姿状态调整至当前位姿状态的目标位姿变化角度,并获取云台在初始位姿状态下增量式编码器的初始码盘计数值,从而根据该目标位姿角度以及该初始码盘计数值,计算出云台处于当前位姿状态下的当前码盘计数值,以基于该当前码盘计数值以及初始位姿状态对云台进行姿态控制;如此,能够利用比IMU等设备测得的惯性姿态角精度更高的码盘计数值作为云台姿态控制的输入,以减少云台在进行姿态控制时输入的噪声,提升云台的姿态控制效果。
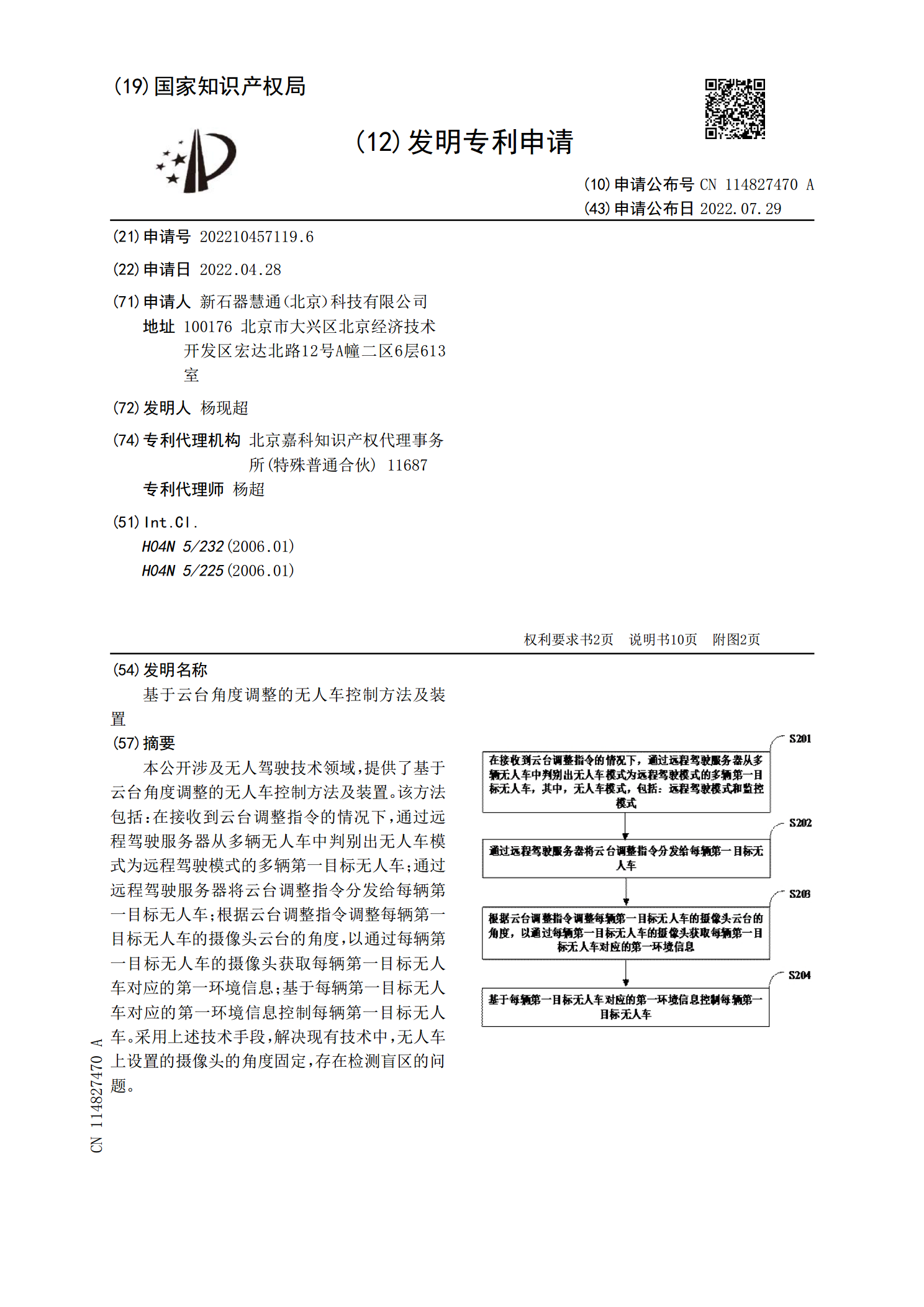
基于云台角度调整的无人车控制方法及装置.pdf
本公开涉及无人驾驶技术领域,提供了基于云台角度调整的无人车控制方法及装置。该方法包括:在接收到云台调整指令的情况下,通过远程驾驶服务器从多辆无人车中判别出无人车模式为远程驾驶模式的多辆第一目标无人车;通过远程驾驶服务器将云台调整指令分发给每辆第一目标无人车;根据云台调整指令调整每辆第一目标无人车的摄像头云台的角度,以通过每辆第一目标无人车的摄像头获取每辆第一目标无人车对应的第一环境信息;基于每辆第一目标无人车对应的第一环境信息控制每辆第一目标无人车。采用上述技术手段,解决现有技术中,无人车上设置的摄像头的
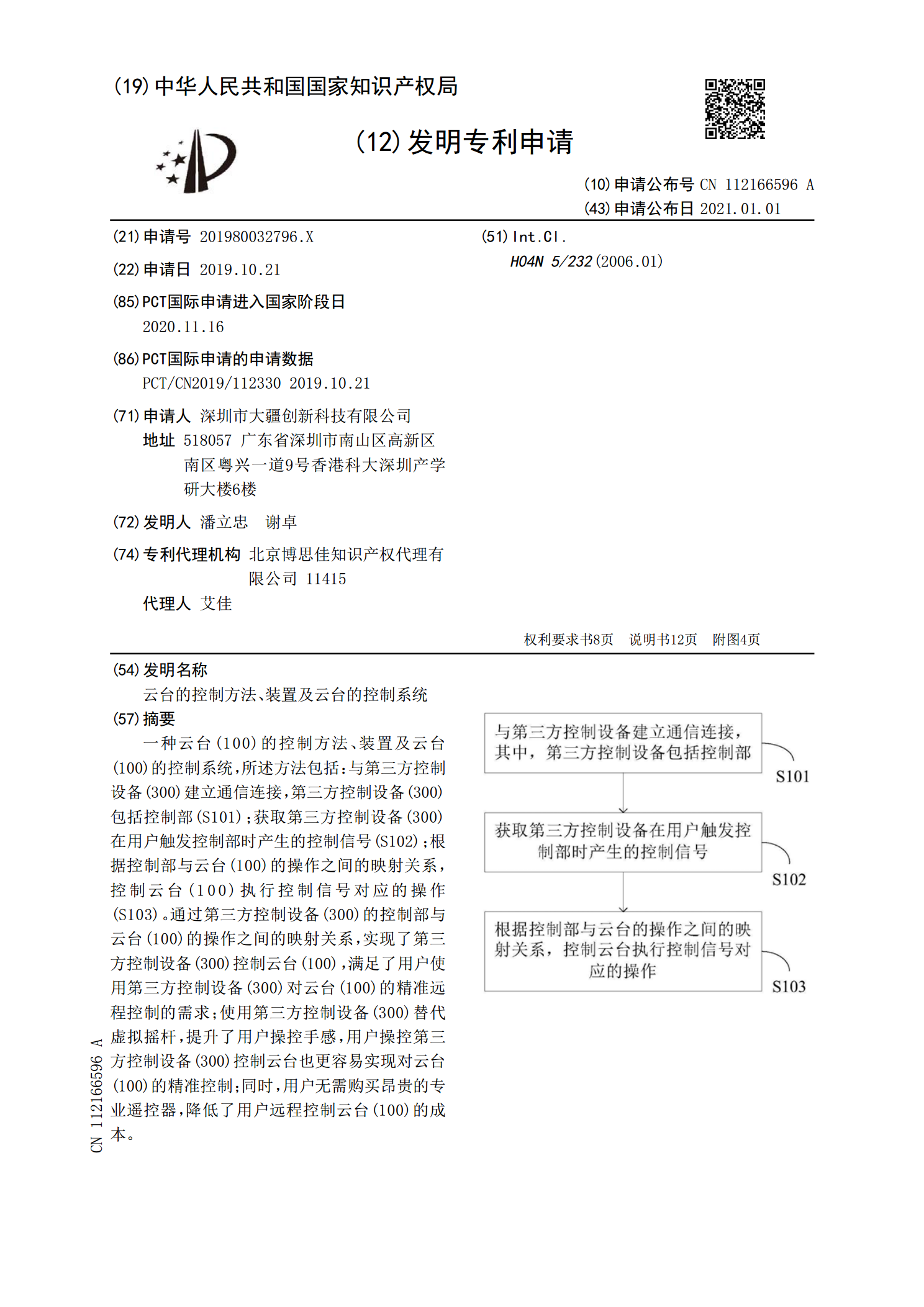
云台的控制方法、装置及云台的控制系统.pdf
一种云台(100)的控制方法、装置及云台(100)的控制系统,所述方法包括:与第三方控制设备(300)建立通信连接,第三方控制设备(300)包括控制部(S101);获取第三方控制设备(300)在用户触发控制部时产生的控制信号(S102);根据控制部与云台(100)的操作之间的映射关系,控制云台(100)执行控制信号对应的操作(S103)。通过第三方控制设备(300)的控制部与云台(100)的操作之间的映射关系,实现了第三方控制设备(300)控制云台(100),满足了用户使用第三方控制设备(300)对云台(