
无人车横向控制方法和装置.pdf

羽沫****魔王


1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
无人车横向控制方法和装置.pdf
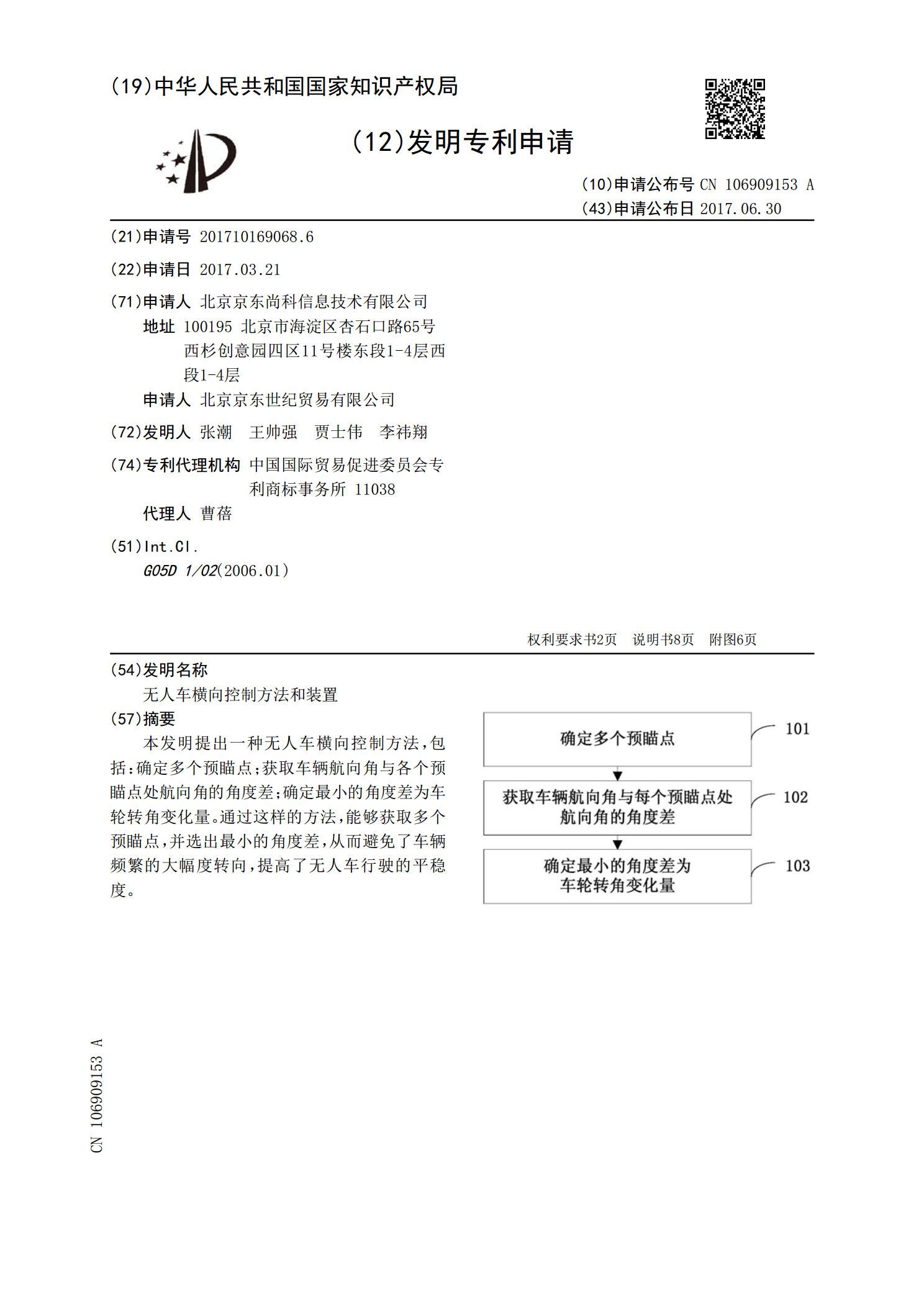
本发明提出一种无人车横向控制方法,包括:确定多个预瞄点;获取车辆航向角与各个预瞄点处航向角的角度差;确定最小的角度差为车轮转角变化量。通过这样的方法,能够获取多个预瞄点,并选出最小的角度差,从而避免了车辆频繁的大幅度转向,提高了无人车行驶的平稳度。

一种无人车横向控制方法、装置、系统及存储介质.pdf
本发明提供了一种无人车横向控制方法、装置、系统及存储介质。该方法包括:获取所述无人车的实时位姿;根据所述实时位姿确定期望路径;基于所述期望路径利用所述实时位姿确定期望初始前轮偏角;基于所述期望路径利用所述实时位姿确定期望补偿前轮偏角;根据所述期望初始前轮偏角和所述期望补偿前轮偏角确定期望方向盘转角;根据所述期望方向盘转角控制所述无人车的方向盘转向。上述方案针对无人车的方向盘零位偏差,在无人车驾驶过程中根据实时检测的实际行驶路径与期望路径之间的偏差对车辆前轮偏角加以在线补偿修正,从而提高了无人车横向控制的精
无人车的翻晒控制方法、装置、终端设备、无人车和介质.pdf
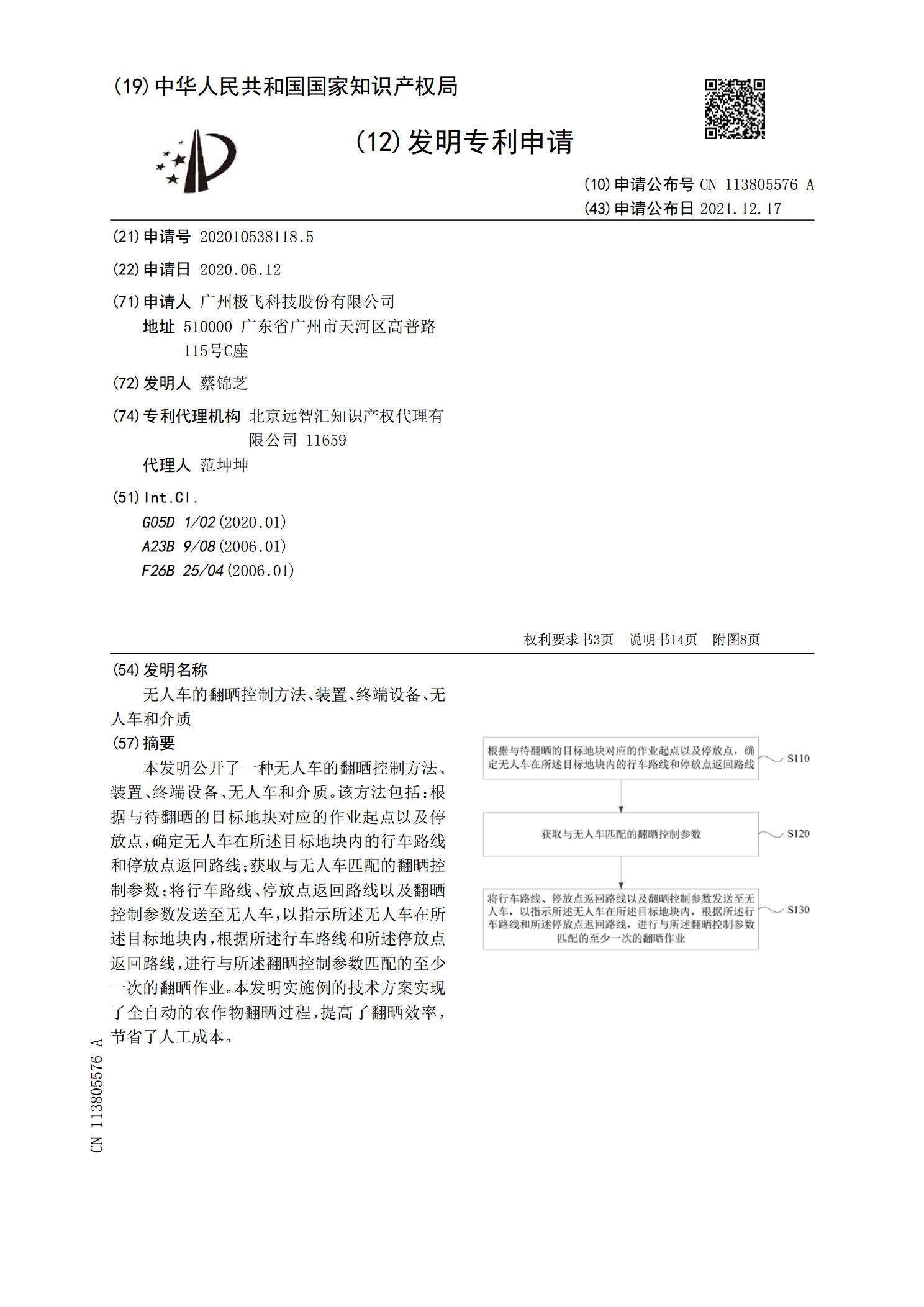
本发明公开了一种无人车的翻晒控制方法、装置、终端设备、无人车和介质。该方法包括:根据与待翻晒的目标地块对应的作业起点以及停放点,确定无人车在所述目标地块内的行车路线和停放点返回路线;获取与无人车匹配的翻晒控制参数;将行车路线、停放点返回路线以及翻晒控制参数发送至无人车,以指示所述无人车在所述目标地块内,根据所述行车路线和所述停放点返回路线,进行与所述翻晒控制参数匹配的至少一次的翻晒作业。本发明实施例的技术方案实现了全自动的农作物翻晒过程,提高了翻晒效率,节省了人工成本。
无人车控制方法、装置、存储介质及无人车.pdf
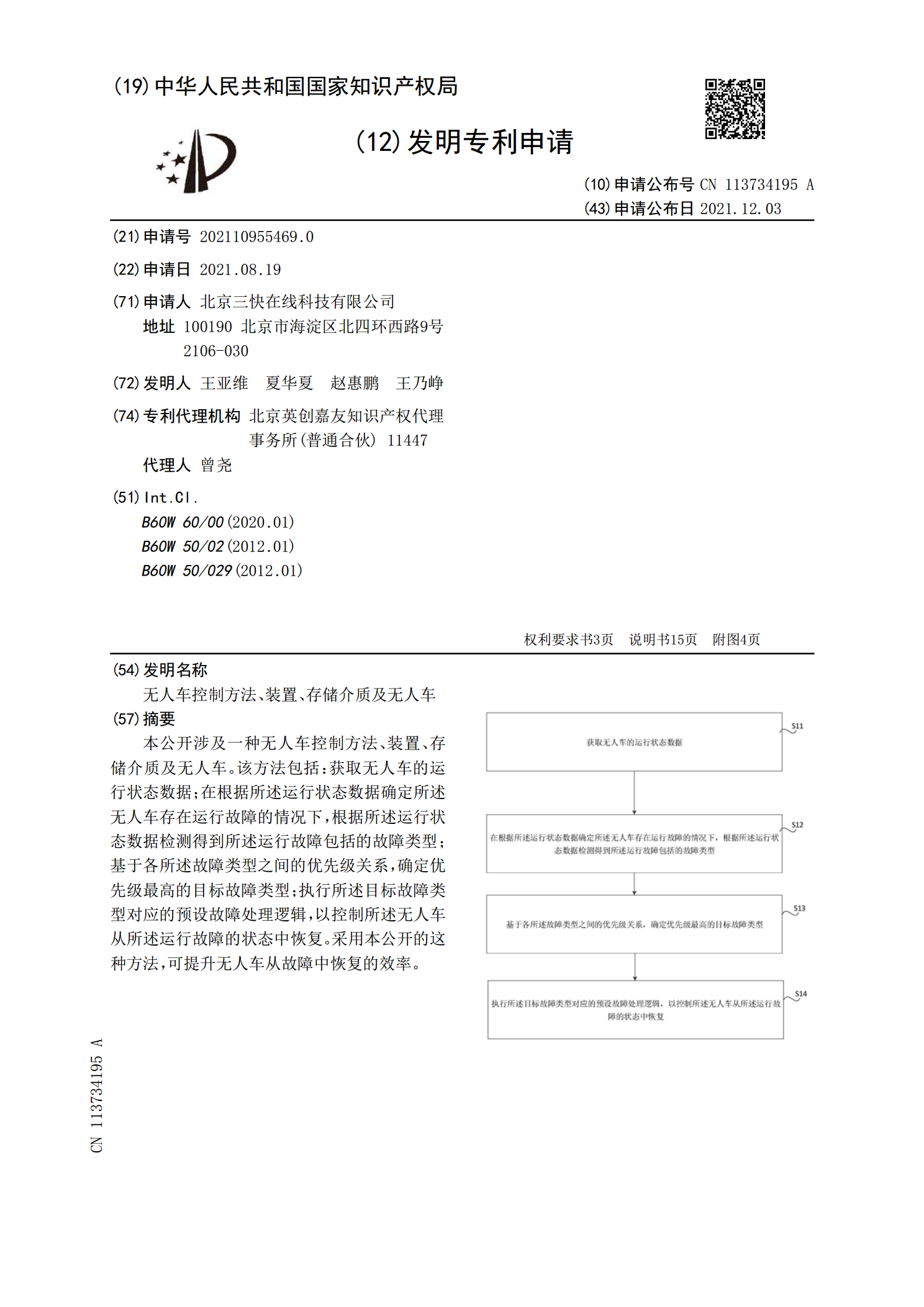
本公开涉及一种无人车控制方法、装置、存储介质及无人车。该方法包括:获取无人车的运行状态数据;在根据所述运行状态数据确定所述无人车存在运行故障的情况下,根据所述运行状态数据检测得到所述运行故障包括的故障类型;基于各所述故障类型之间的优先级关系,确定优先级最高的目标故障类型;执行所述目标故障类型对应的预设故障处理逻辑,以控制所述无人车从所述运行故障的状态中恢复。采用本公开的这种方法,可提升无人车从故障中恢复的效率。

无人车的播种控制方法、装置、终端设备、无人车和介质.pdf
本发明公开了一种无人车的播种控制方法、装置、终端设备和存储介质。该方法包括:获取待播种的目标地块的地块定位信息,并根据所述地块定位信息,确定与所述目标地块对应的地块描述参数;根据所述地块描述参数以及与所述目标地块对应的播种控制参数,生成所述无人车的行车路线和播种控制信息;将所述行车路线和所述播种控制信息发送至所述无人车,以指示所述无人车在沿所述行车路线行进过程中,按照所述播种控制信息对目标地块进行播种。本发明实施例的技术方案可以实现播种过程的全自动,提高播种效率,节省人工成本以及增强播种效果。