
机器人控制系统、机器人控制方法和存储介质.pdf

书生****aa

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人控制系统、机器人控制方法和存储介质.pdf
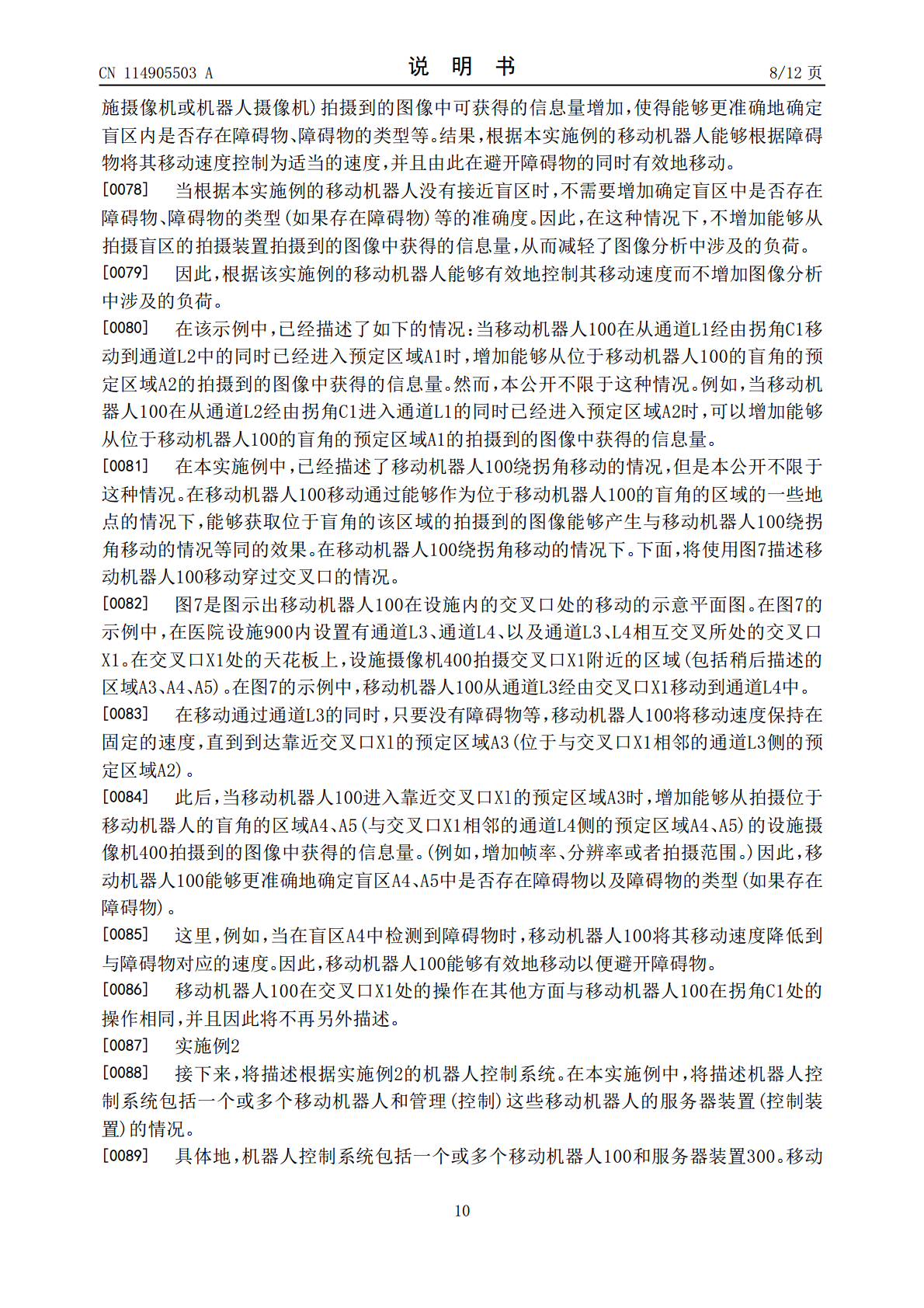
本公开提供一种机器人控制系统、机器人控制方法和存储介质。在根据实施例的机器人控制系统中,至少基于拍摄位于移动机器人的盲角的盲区的拍摄装置拍摄到的图像来控制在设施内自主移动的所述移动机器人的操作。当检测到所述移动机器人进入与所述盲区对应的所述预定区域时,增加能够从所述拍摄装置拍摄到的图像中获得的信息量。
代理机器人控制系统、代理机器人控制方法和存储介质.pdf
本公开涉及一种代理机器人控制系统、代理机器人控制方法和存储介质。[问题]为了提供能够帮助在实体店面和线上店面中进行最优购物的代理机器人控制系统、代理机器人系统、代理机器人控制方法和记录介质。[解决方案]提供了一种代理机器人控制系统,包括:获取单元,其获取示出用户的购买商品候选的购买主列表;以及控制单元,其生成购买执行列表,所述购买执行列表用于从购买主列表中推荐要在实体店面执行的对选择商品的购买并且用于推荐要在线上店面执行的对其它商品的购买。
机器人的爬楼控制方法、装置、存储介质和机器人.pdf
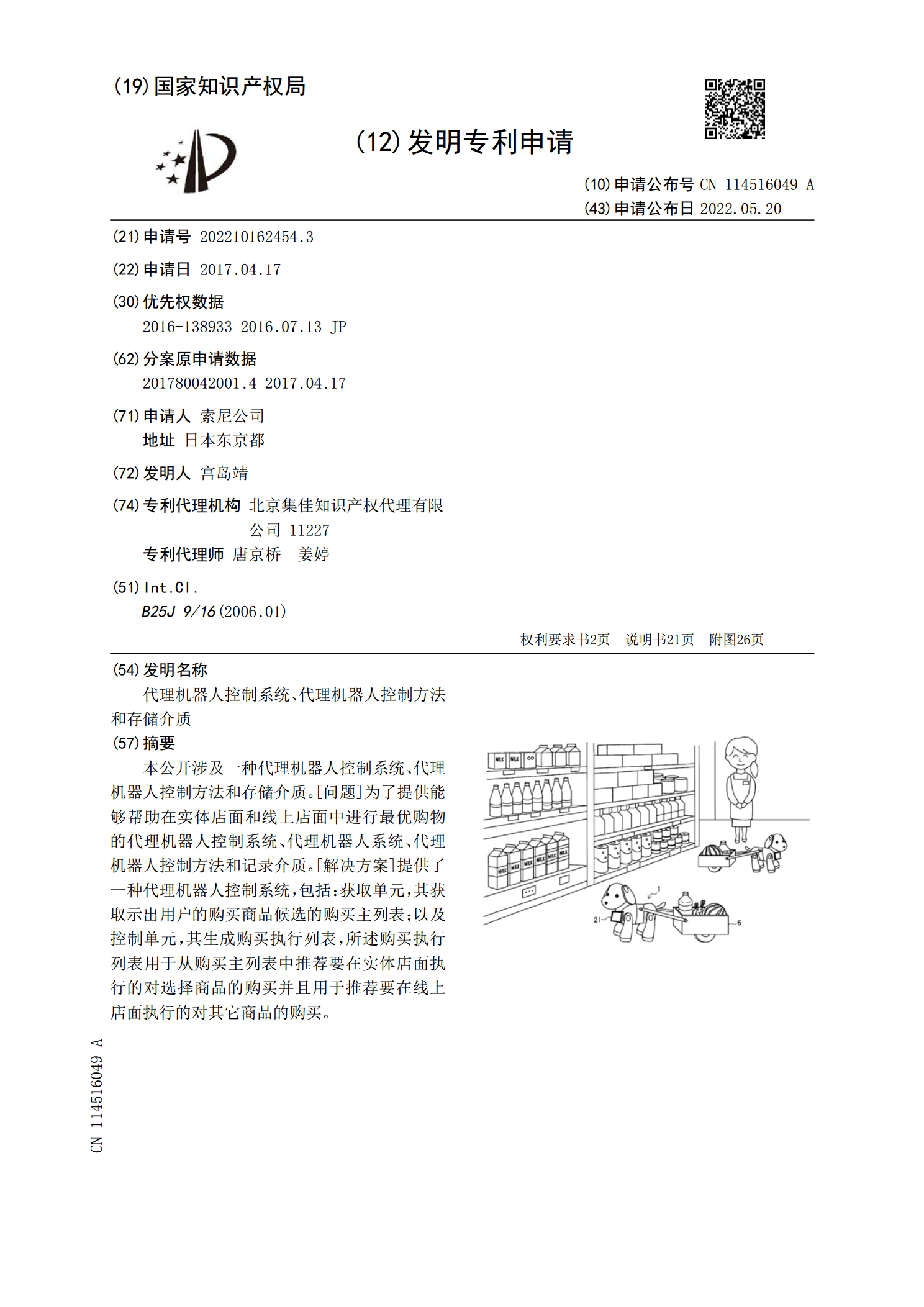
本申请适用于机器人控制技术领域,提供了一种机器人的爬楼控制方法、装置、存储介质和机器人,包括:获取楼梯的RGB彩色图像和深度图像;从所述RGB彩色图像中提取所述楼梯上目标阶梯的目标区域轮廓;根据所述深度图像与所述目标区域轮廓,确定机器人与所述目标阶梯的相对位置信息;根据所述相对位置信息,控制所述机器人爬上所述目标阶梯。本申请可使得机器人可以在任意尺寸的、非标准化的楼梯上有效调整姿态和前进方向,避免行走方向出现偏移,从而提高了机器人爬楼的有效性和安全性。

机器人控制系统、机器人装置以及存储介质.pdf
本发明提供一种机器人控制系统、机器人装置以及存储介质,能够将无法判定为未从外部观察机器人装置的控制条件,反映至用于控制机器人装置的动作的控制信息中。机器人装置(10)是基于所设定的控制参数来自行动作的机器人装置,其接收被用于控制参数的更新的更新信息,并基于所接收的更新信息来进行控制参数的更新。摄像机(61)、(62)拍摄机器人装置(10)的图像。控制服务器(20)具有发送部件,所述发送部件将基于由摄像机(61)、(62)所拍摄的图像而生成的更新信息发送至机器人装置(10)。

机器人、机器人控制方法、装置、存储介质和控制器.pdf
本申请公开了机器人、机器人控制方法、装置、存储介质和控制器,涉及人工智能技术领域。该机器人包括机器人主体,还包括传感器、第一显示屏、第二显示屏和控制器,其中:所述第一显示屏的尺寸小于所述第二显示屏的尺寸;所述传感器用于检测目标对象与机器人的距离;所述控制器用于根据目标对象与机器人的距离,以及预设的距离区间与内容类型的对应关系,控制第一显示屏和/或第二显示屏显示相应类型的内容。本申请实施例提供的机器人具有尺寸不同的两个屏幕,可以根据目标对象和机器人的距离控制适合的屏幕显示相应类型的内容。