
盲区检测系统的测试方法、装置、车辆及存储介质.pdf

森林****io

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
盲区检测系统的测试方法、装置、车辆及存储介质.pdf
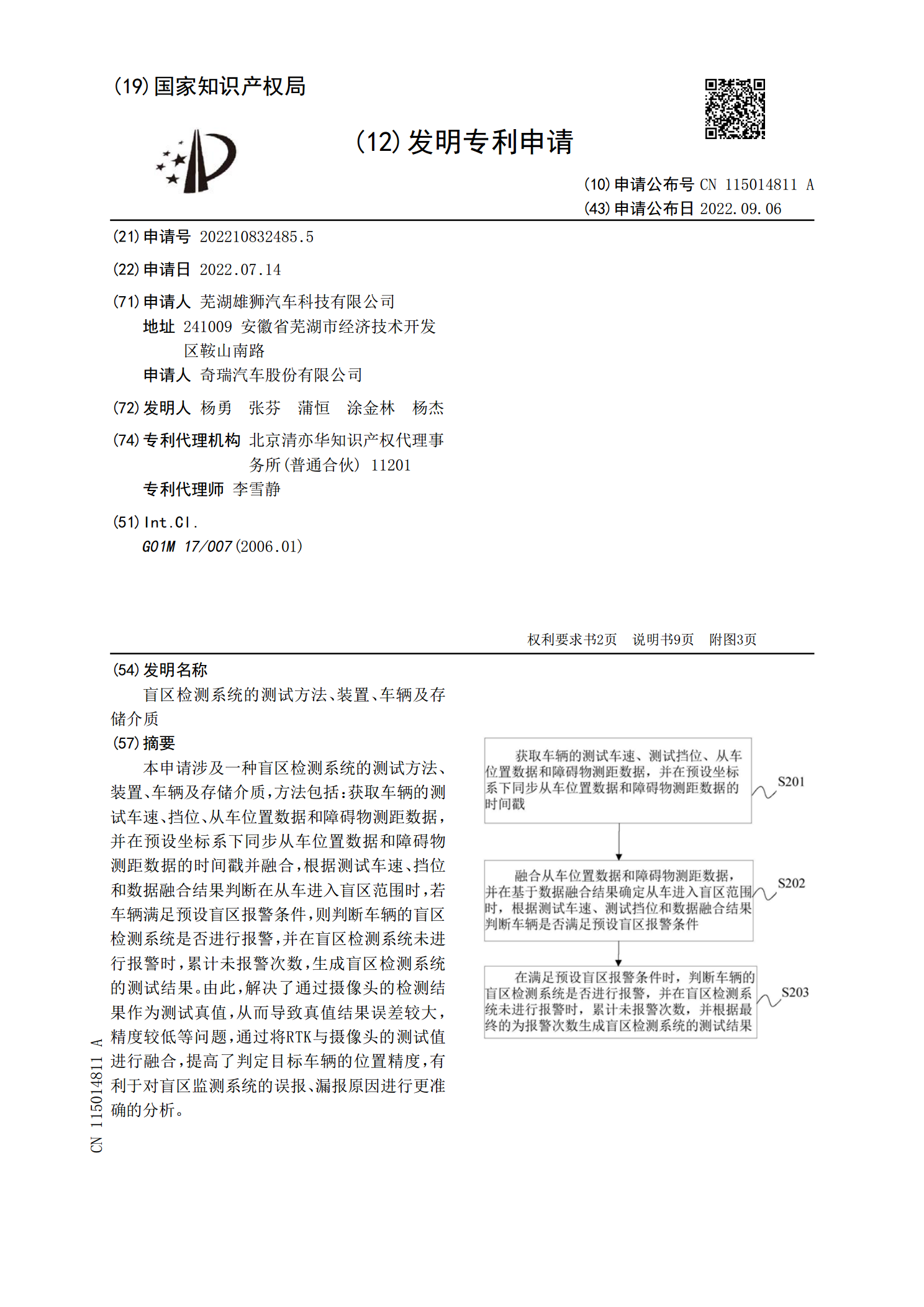
本申请涉及一种盲区检测系统的测试方法、装置、车辆及存储介质,方法包括:获取车辆的测试车速、挡位、从车位置数据和障碍物测距数据,并在预设坐标系下同步从车位置数据和障碍物测距数据的时间戳并融合,根据测试车速、挡位和数据融合结果判断在从车进入盲区范围时,若车辆满足预设盲区报警条件,则判断车辆的盲区检测系统是否进行报警,并在盲区检测系统未进行报警时,累计未报警次数,生成盲区检测系统的测试结果。由此,解决了通过摄像头的检测结果作为测试真值,从而导致真值结果误差较大,精度较低等问题,通过将RTK与摄像头的测试值进行融
车辆的盲区辅助系统评价方法、装置、车辆及存储介质.pdf
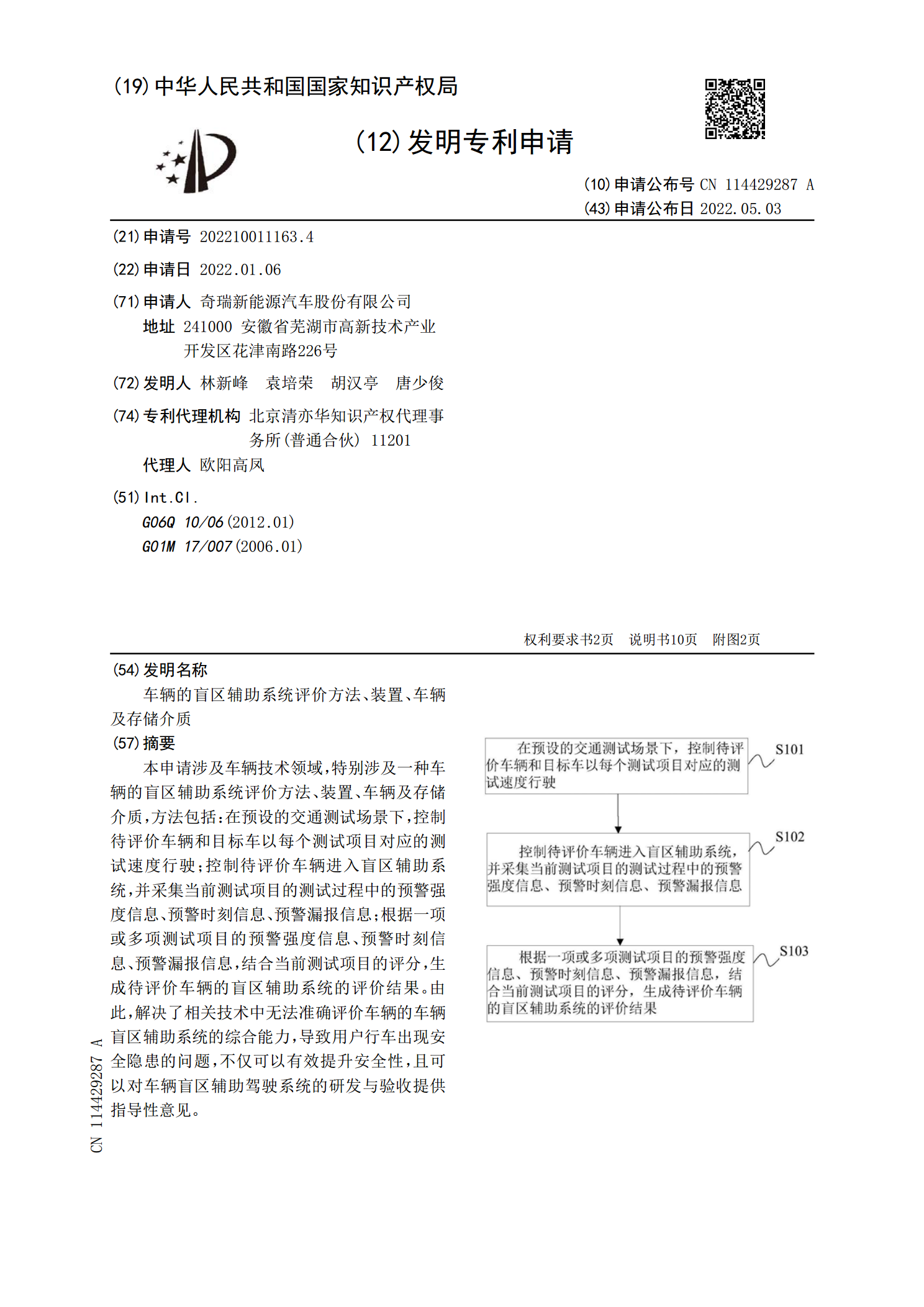
本申请涉及车辆技术领域,特别涉及一种车辆的盲区辅助系统评价方法、装置、车辆及存储介质,方法包括:在预设的交通测试场景下,控制待评价车辆和目标车以每个测试项目对应的测试速度行驶;控制待评价车辆进入盲区辅助系统,并采集当前测试项目的测试过程中的预警强度信息、预警时刻信息、预警漏报信息;根据一项或多项测试项目的预警强度信息、预警时刻信息、预警漏报信息,结合当前测试项目的评分,生成待评价车辆的盲区辅助系统的评价结果。由此,解决了相关技术中无法准确评价车辆的车辆盲区辅助系统的综合能力,导致用户行车出现安全隐患的问题
盲区行人检测方法、系统、车辆及存储介质.pdf
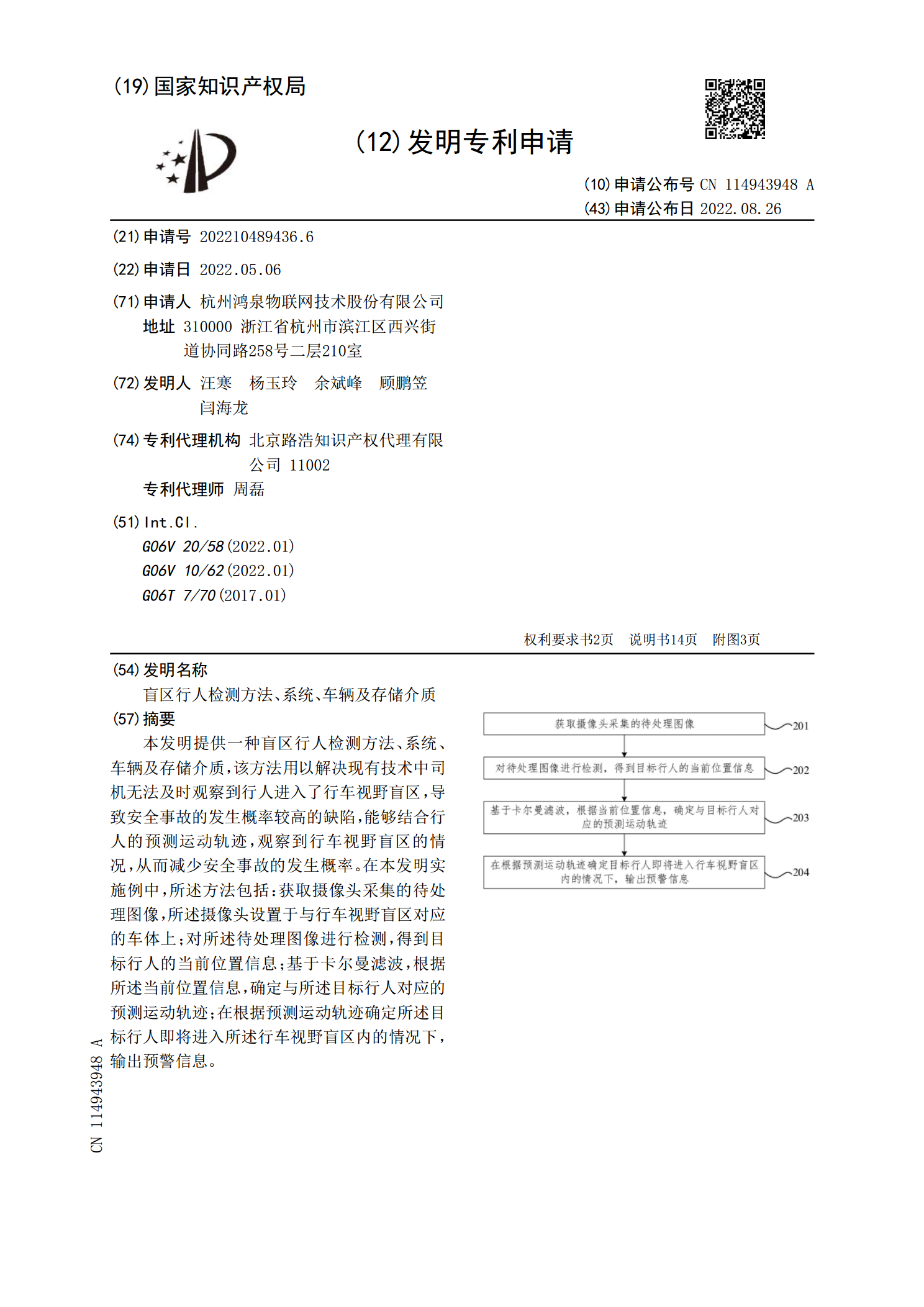
本发明提供一种盲区行人检测方法、系统、车辆及存储介质,该方法用以解决现有技术中司机无法及时观察到行人进入了行车视野盲区,导致安全事故的发生概率较高的缺陷,能够结合行人的预测运动轨迹,观察到行车视野盲区的情况,从而减少安全事故的发生概率。在本发明实施例中,所述方法包括:获取摄像头采集的待处理图像,所述摄像头设置于与行车视野盲区对应的车体上;对所述待处理图像进行检测,得到目标行人的当前位置信息;基于卡尔曼滤波,根据所述当前位置信息,确定与所述目标行人对应的预测运动轨迹;在根据预测运动轨迹确定所述目标行人即将进
车辆盲区检测处理方法、装置、车载终端和存储介质.pdf
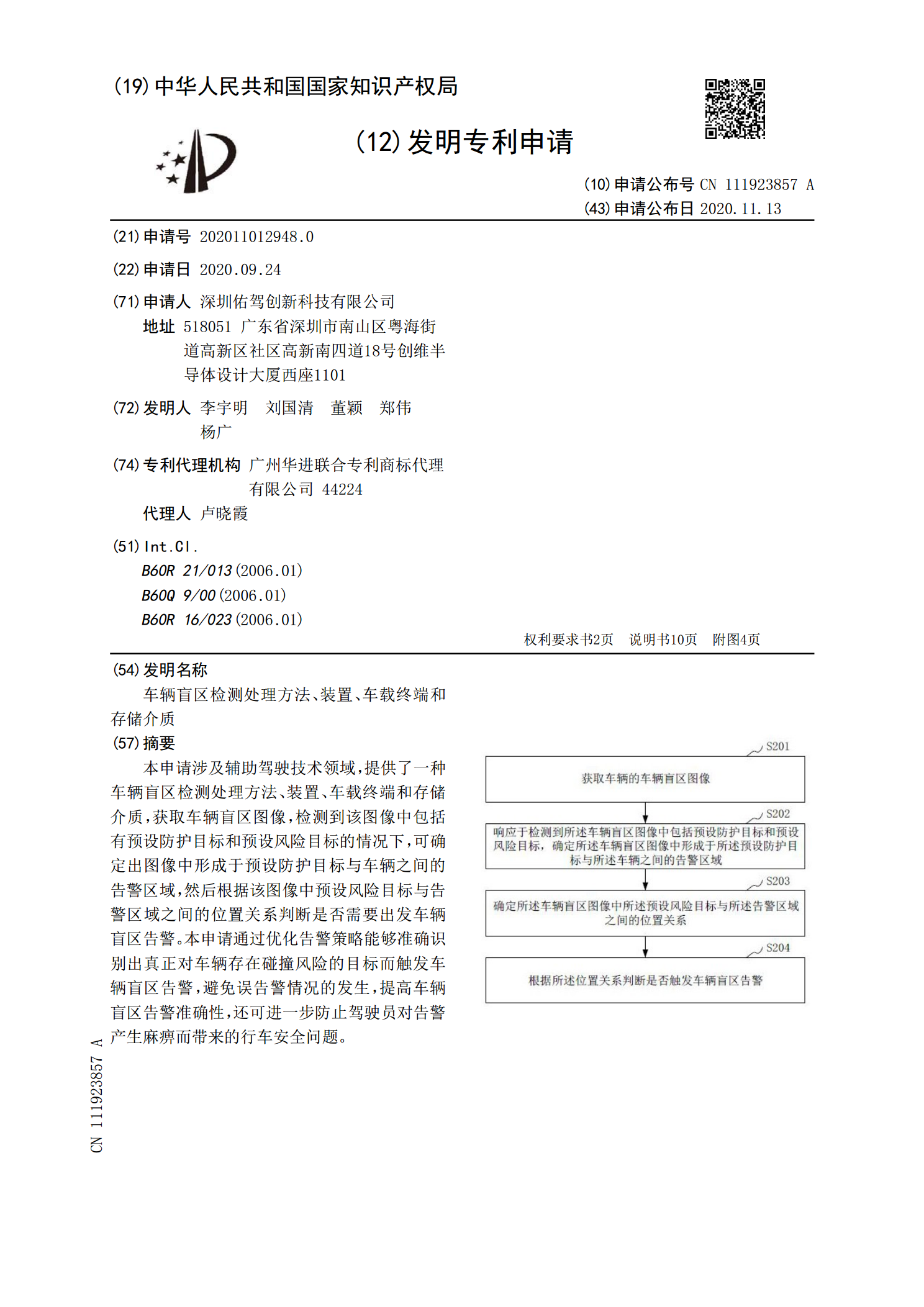
本申请涉及辅助驾驶技术领域,提供了一种车辆盲区检测处理方法、装置、车载终端和存储介质,获取车辆盲区图像,检测到该图像中包括有预设防护目标和预设风险目标的情况下,可确定出图像中形成于预设防护目标与车辆之间的告警区域,然后根据该图像中预设风险目标与告警区域之间的位置关系判断是否需要出发车辆盲区告警。本申请通过优化告警策略能够准确识别出真正对车辆存在碰撞风险的目标而触发车辆盲区告警,避免误告警情况的发生,提高车辆盲区告警准确性,还可进一步防止驾驶员对告警产生麻痹而带来的行车安全问题。
车辆及其驾驶盲区预警方法、装置、系统和存储介质.pdf
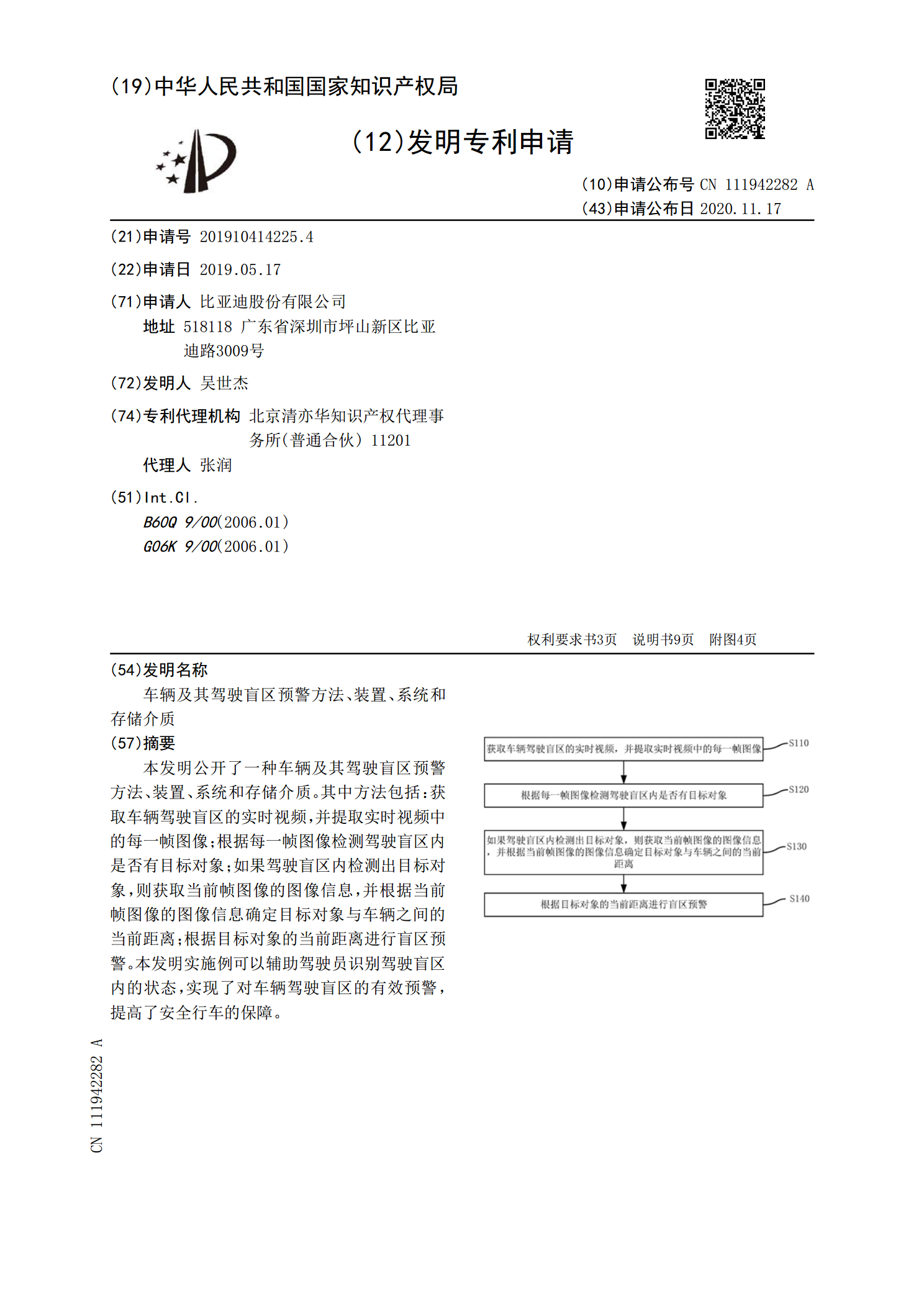
本发明公开了一种车辆及其驾驶盲区预警方法、装置、系统和存储介质。其中方法包括:获取车辆驾驶盲区的实时视频,并提取实时视频中的每一帧图像;根据每一帧图像检测驾驶盲区内是否有目标对象;如果驾驶盲区内检测出目标对象,则获取当前帧图像的图像信息,并根据当前帧图像的图像信息确定目标对象与车辆之间的当前距离;根据目标对象的当前距离进行盲区预警。本发明实施例可以辅助驾驶员识别驾驶盲区内的状态,实现了对车辆驾驶盲区的有效预警,提高了安全行车的保障。