
一种基于动态轨迹规划的自动驾驶连续避障方法.pdf

志玉****爱啊

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于动态轨迹规划的自动驾驶连续避障方法.pdf
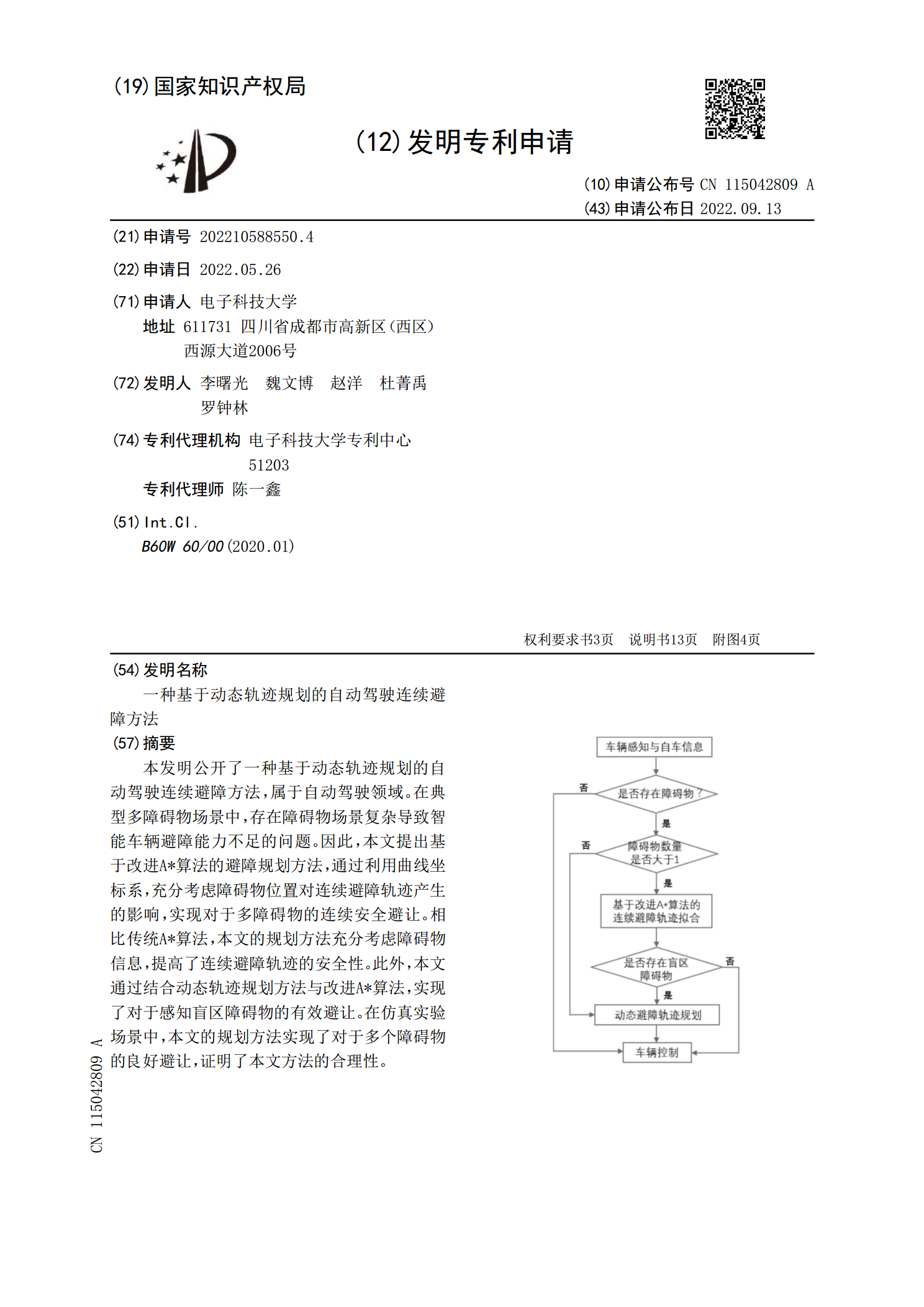
本发明公开了一种基于动态轨迹规划的自动驾驶连续避障方法,属于自动驾驶领域。在典型多障碍物场景中,存在障碍物场景复杂导致智能车辆避障能力不足的问题。因此,本文提出基于改进A*算法的避障规划方法,通过利用曲线坐标系,充分考虑障碍物位置对连续避障轨迹产生的影响,实现对于多障碍物的连续安全避让。相比传统A*算法,本文的规划方法充分考虑障碍物信息,提高了连续避障轨迹的安全性。此外,本文通过结合动态轨迹规划方法与改进A*算法,实现了对于感知盲区障碍物的有效避让。在仿真实验场景中,本文的规划方法实现了对于多个障碍物的良
基于轨迹规划的自动驾驶车辆避障控制方法及系统.pdf
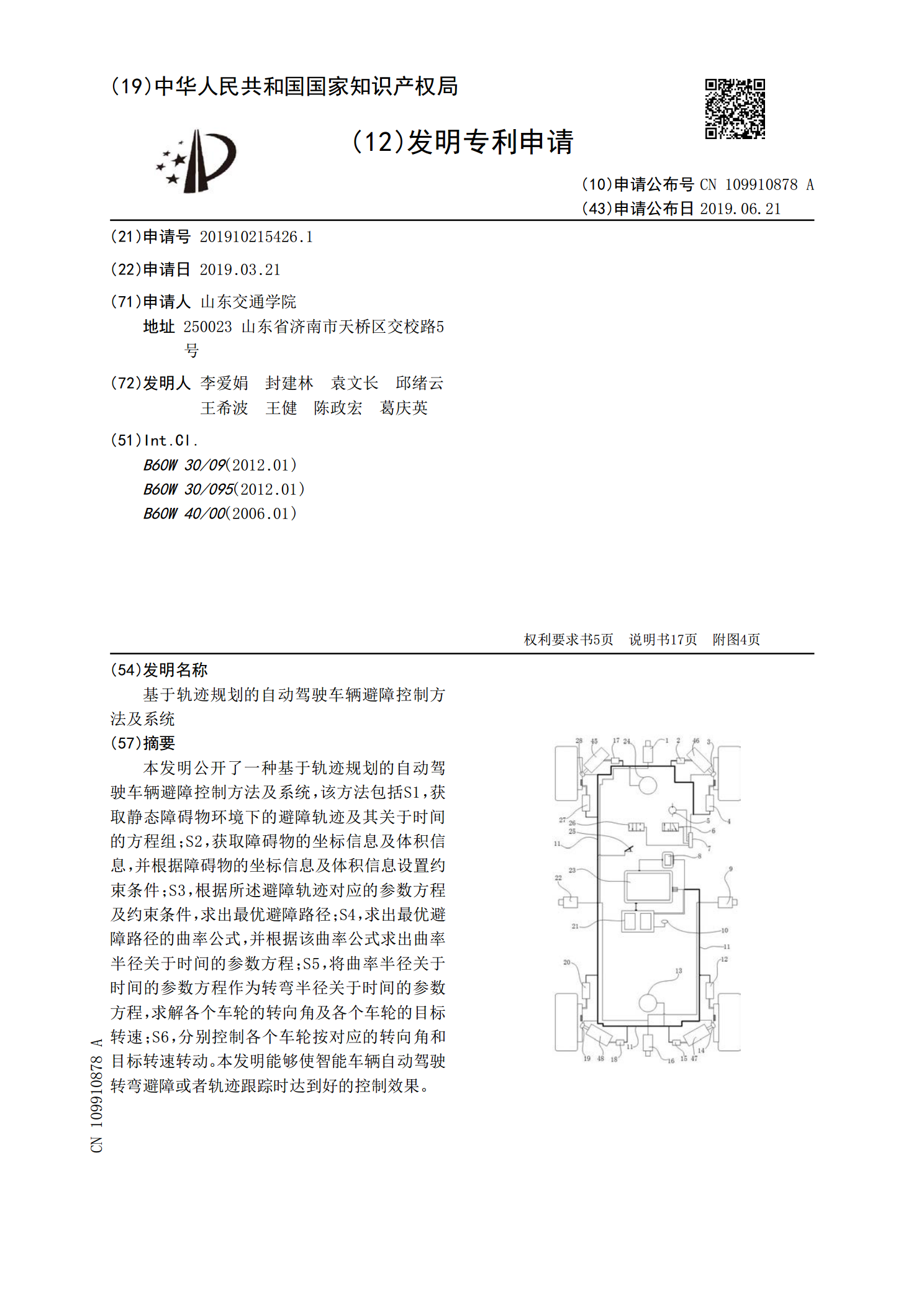
本发明公开了一种基于轨迹规划的自动驾驶车辆避障控制方法及系统,该方法包括S1,获取静态障碍物环境下的避障轨迹及其关于时间的方程组;S2,获取障碍物的坐标信息及体积信息,并根据障碍物的坐标信息及体积信息设置约束条件;S3,根据所述避障轨迹对应的参数方程及约束条件,求出最优避障路径;S4,求出最优避障路径的曲率公式,并根据该曲率公式求出曲率半径关于时间的参数方程;S5,将曲率半径关于时间的参数方程作为转弯半径关于时间的参数方程,求解各个车轮的转向角及各个车轮的目标转速;S6,分别控制各个车轮按对应的转向角和目

自动驾驶车辆的避障轨迹规划.pdf
公开了一种用于操作ADV的计算机实施的方法。规划ADV沿其驾驶的第一轨迹(S1401)。ADV将沿第一轨迹自动驾驶(S1402)。基于从安装在ADV上的多个传感器获得的传感器数据来检测ADV的受影响区域中的障碍物(S1403)。确定障碍物在受影响区域中的预期驻留时间(S1404)。基于障碍物在受影响区域中的预期驻留时间来确定是规划第二轨迹还是等待障碍物离开受影响区域(S1405)。规划ADV沿其驾驶的第二轨迹,并且ADV将沿第二轨迹自动驾驶,或者ADV将等待障碍物离开受影响区域并随后沿第一轨迹自动驾驶(S
一种基于自动驾驶的避障方法和装置.pdf
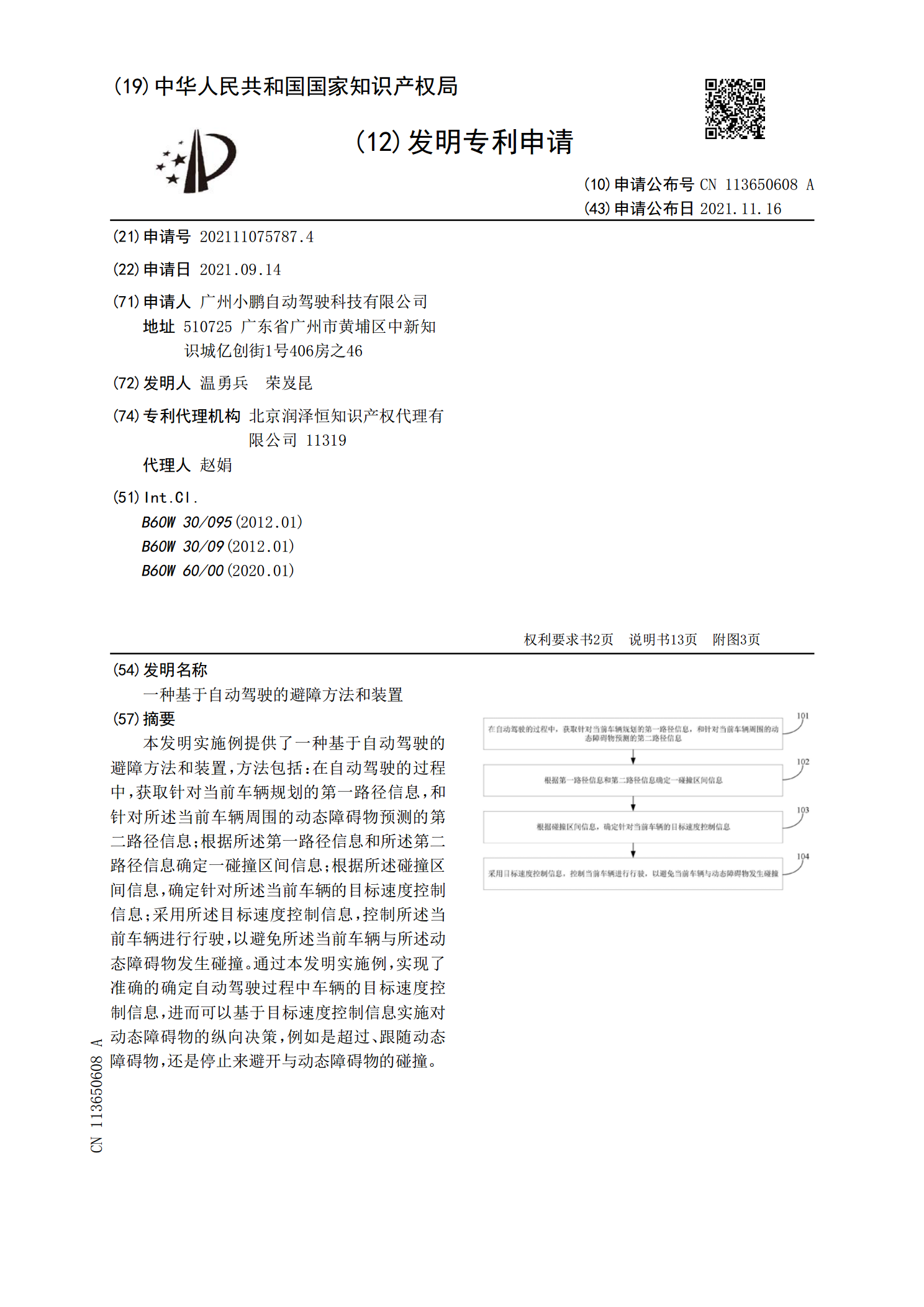
本发明实施例提供了一种基于自动驾驶的避障方法和装置,方法包括:在自动驾驶的过程中,获取针对当前车辆规划的第一路径信息,和针对所述当前车辆周围的动态障碍物预测的第二路径信息;根据所述第一路径信息和所述第二路径信息确定一碰撞区间信息;根据所述碰撞区间信息,确定针对所述当前车辆的目标速度控制信息;采用所述目标速度控制信息,控制所述当前车辆进行行驶,以避免所述当前车辆与所述动态障碍物发生碰撞。通过本发明实施例,实现了准确的确定自动驾驶过程中车辆的目标速度控制信息,进而可以基于目标速度控制信息实施对动态障碍物的纵向
一种基于机器学习的AGV动态避障方法.pdf
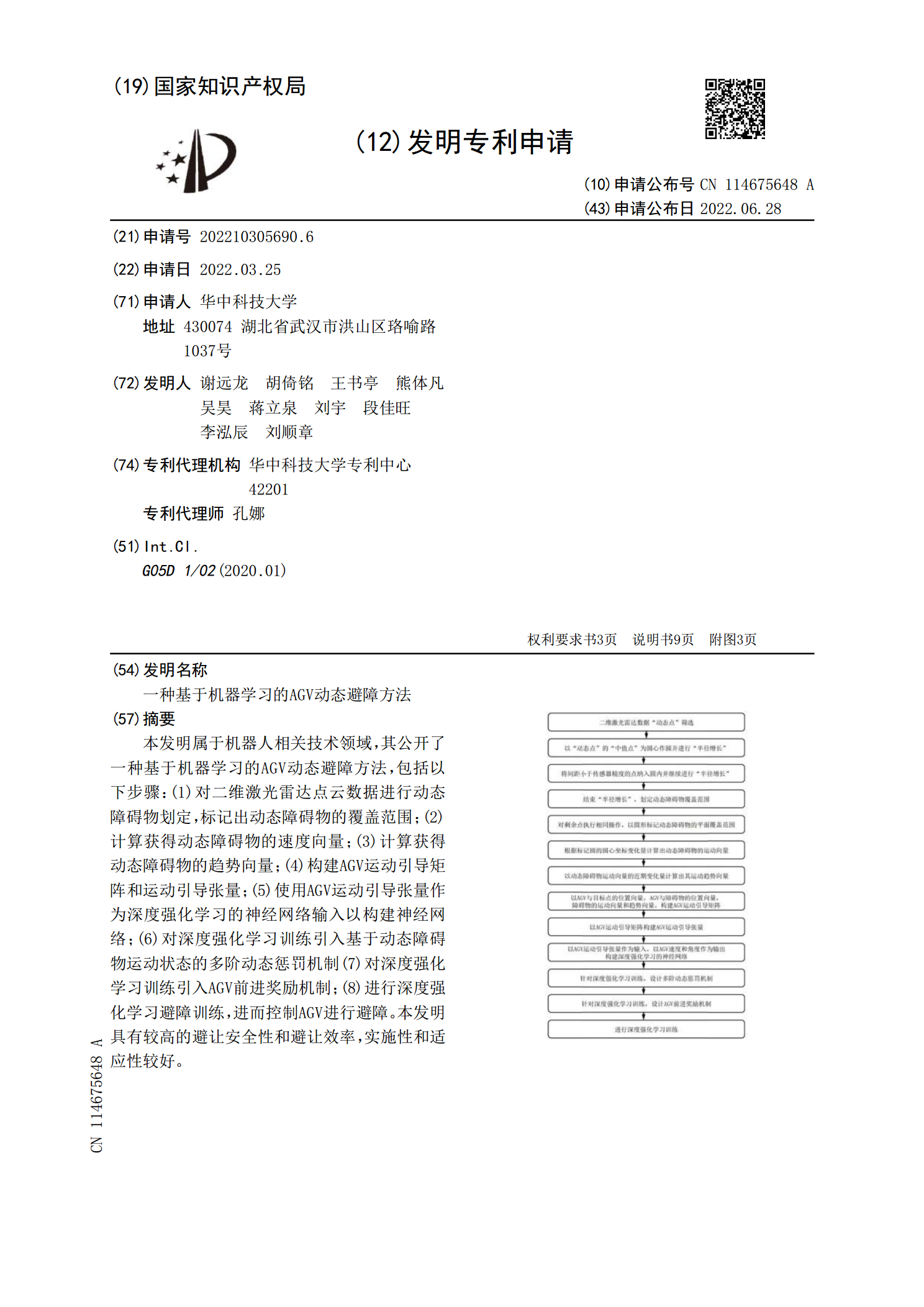
本发明属于机器人相关技术领域,其公开了一种基于机器学习的AGV动态避障方法,包括以下步骤:(1)对二维激光雷达点云数据进行动态障碍物划定,标记出动态障碍物的覆盖范围;(2)计算获得动态障碍物的速度向量;(3)计算获得动态障碍物的趋势向量;(4)构建AGV运动引导矩阵和运动引导张量;(5)使用AGV运动引导张量作为深度强化学习的神经网络输入以构建神经网络;(6)对深度强化学习训练引入基于动态障碍物运动状态的多阶动态惩罚机制(7)对深度强化学习训练引入AGV前进奖励机制;(8)进行深度强化学习避障训练,进而控