
基于轨迹规划的自动驾驶车辆避障控制方法及系统.pdf

Jo****34


1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于轨迹规划的自动驾驶车辆避障控制方法及系统.pdf
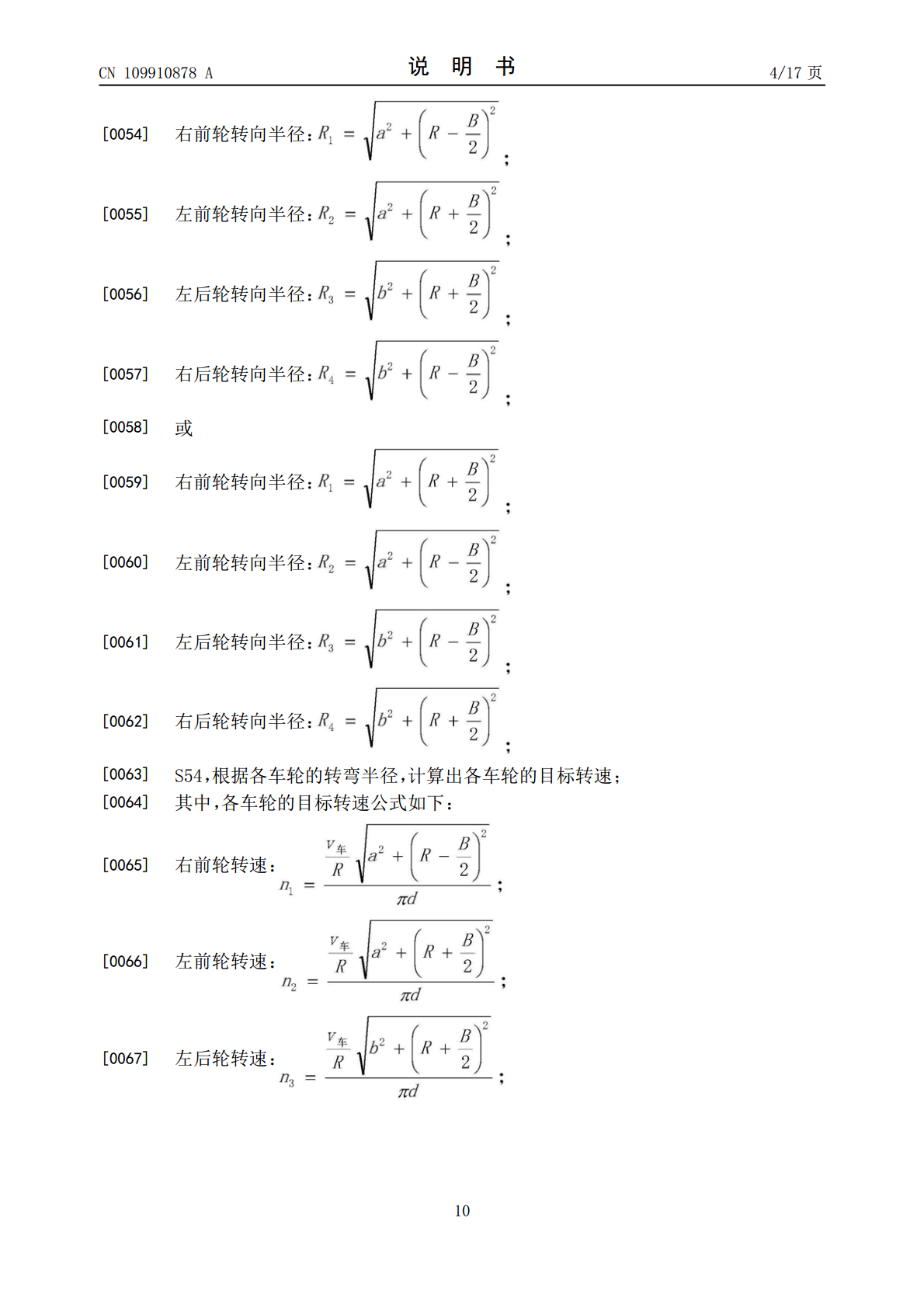
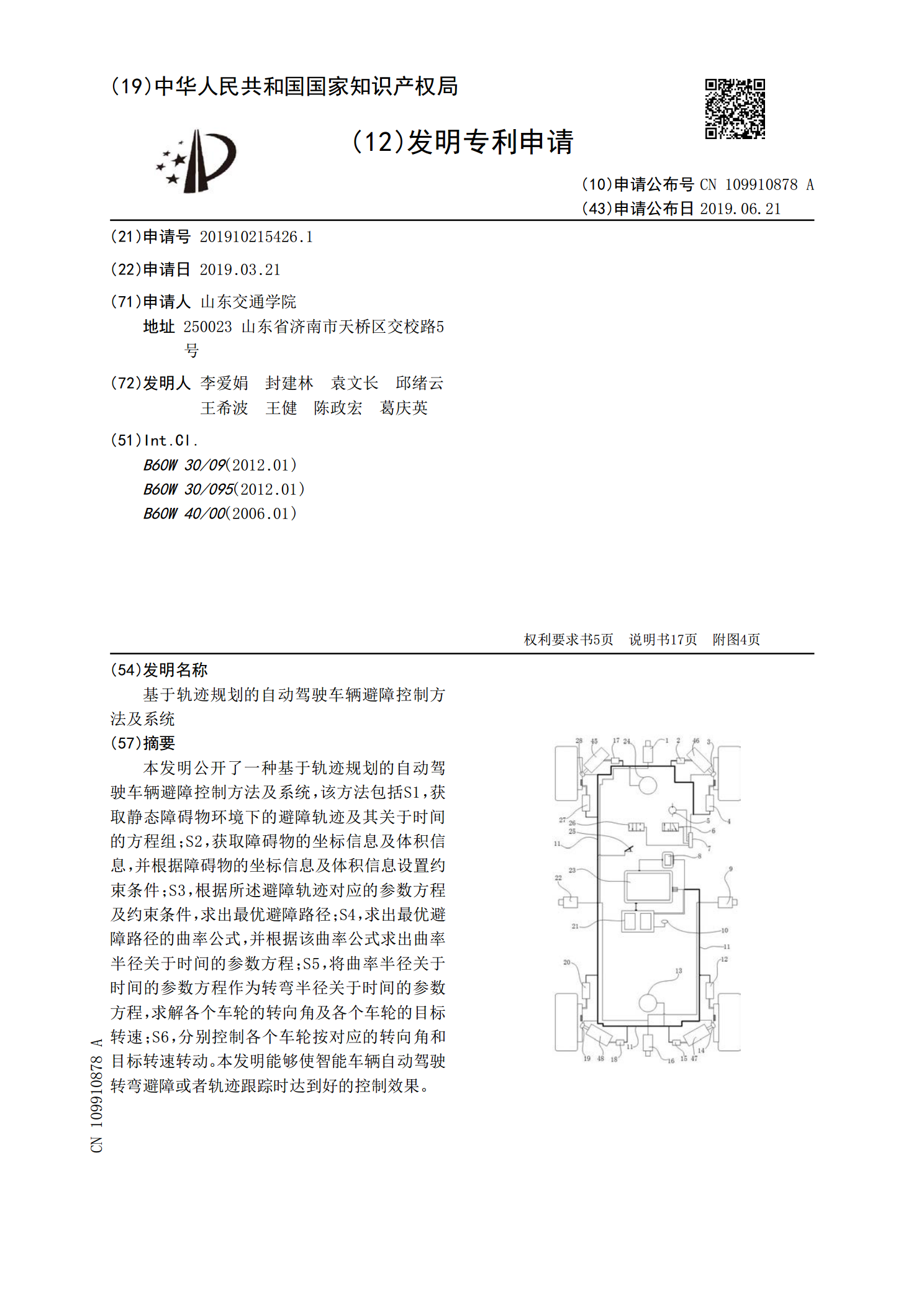
本发明公开了一种基于轨迹规划的自动驾驶车辆避障控制方法及系统,该方法包括S1,获取静态障碍物环境下的避障轨迹及其关于时间的方程组;S2,获取障碍物的坐标信息及体积信息,并根据障碍物的坐标信息及体积信息设置约束条件;S3,根据所述避障轨迹对应的参数方程及约束条件,求出最优避障路径;S4,求出最优避障路径的曲率公式,并根据该曲率公式求出曲率半径关于时间的参数方程;S5,将曲率半径关于时间的参数方程作为转弯半径关于时间的参数方程,求解各个车轮的转向角及各个车轮的目标转速;S6,分别控制各个车轮按对应的转向角和目

自动驾驶车辆的避障轨迹规划.pdf
公开了一种用于操作ADV的计算机实施的方法。规划ADV沿其驾驶的第一轨迹(S1401)。ADV将沿第一轨迹自动驾驶(S1402)。基于从安装在ADV上的多个传感器获得的传感器数据来检测ADV的受影响区域中的障碍物(S1403)。确定障碍物在受影响区域中的预期驻留时间(S1404)。基于障碍物在受影响区域中的预期驻留时间来确定是规划第二轨迹还是等待障碍物离开受影响区域(S1405)。规划ADV沿其驾驶的第二轨迹,并且ADV将沿第二轨迹自动驾驶,或者ADV将等待障碍物离开受影响区域并随后沿第一轨迹自动驾驶(S
一种基于动态轨迹规划的自动驾驶连续避障方法.pdf
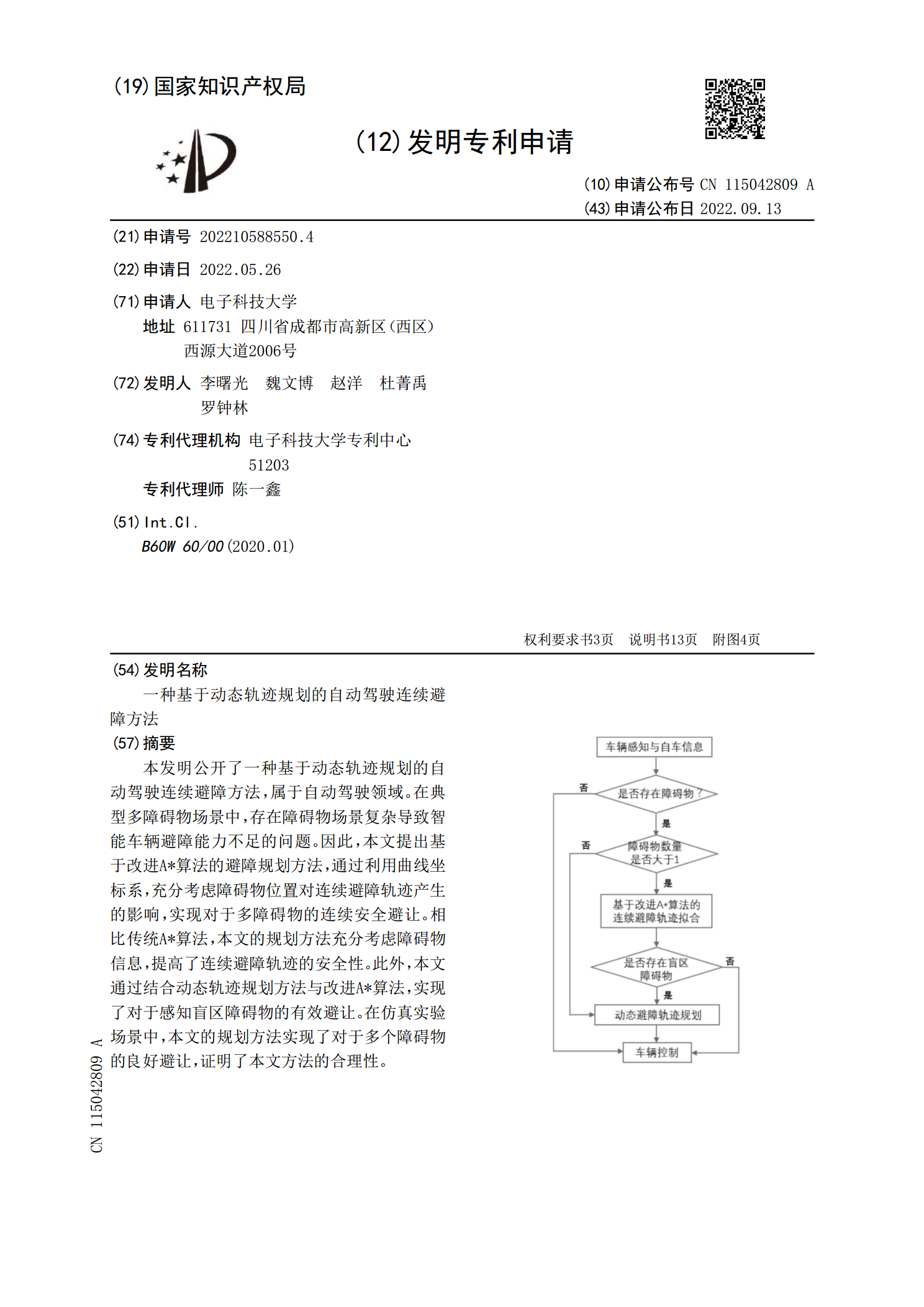
本发明公开了一种基于动态轨迹规划的自动驾驶连续避障方法,属于自动驾驶领域。在典型多障碍物场景中,存在障碍物场景复杂导致智能车辆避障能力不足的问题。因此,本文提出基于改进A*算法的避障规划方法,通过利用曲线坐标系,充分考虑障碍物位置对连续避障轨迹产生的影响,实现对于多障碍物的连续安全避让。相比传统A*算法,本文的规划方法充分考虑障碍物信息,提高了连续避障轨迹的安全性。此外,本文通过结合动态轨迹规划方法与改进A*算法,实现了对于感知盲区障碍物的有效避让。在仿真实验场景中,本文的规划方法实现了对于多个障碍物的良
一种智能车辆避障换道轨迹规划方法及系统.pdf
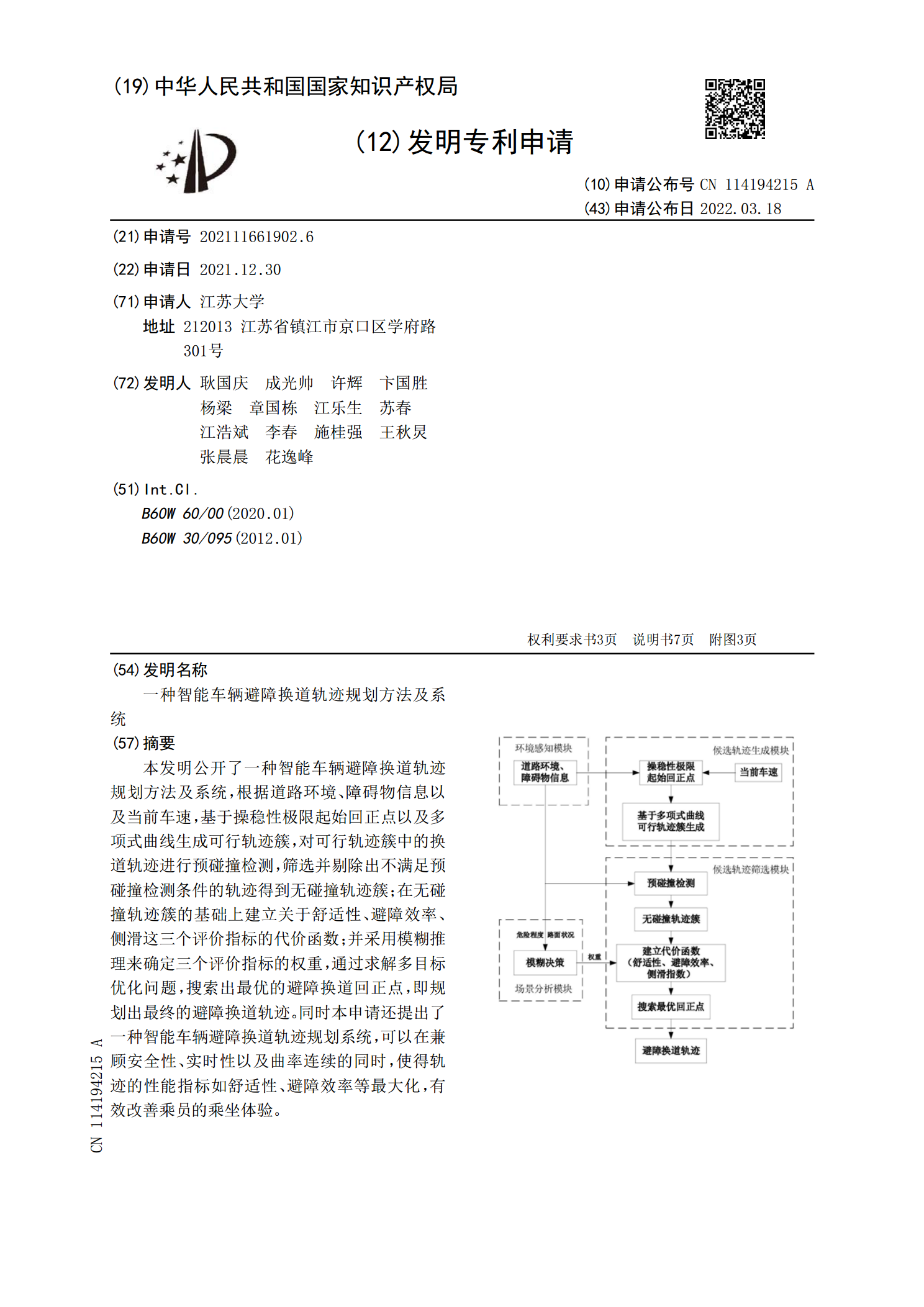
本发明公开了一种智能车辆避障换道轨迹规划方法及系统,根据道路环境、障碍物信息以及当前车速,基于操稳性极限起始回正点以及多项式曲线生成可行轨迹簇,对可行轨迹簇中的换道轨迹进行预碰撞检测,筛选并剔除出不满足预碰撞检测条件的轨迹得到无碰撞轨迹簇;在无碰撞轨迹簇的基础上建立关于舒适性、避障效率、侧滑这三个评价指标的代价函数;并采用模糊推理来确定三个评价指标的权重,通过求解多目标优化问题,搜索出最优的避障换道回正点,即规划出最终的避障换道轨迹。同时本申请还提出了一种智能车辆避障换道轨迹规划系统,可以在兼顾安全性、实
自动驾驶车辆局部避障及路径跟踪方法、系统及存储介质.pdf
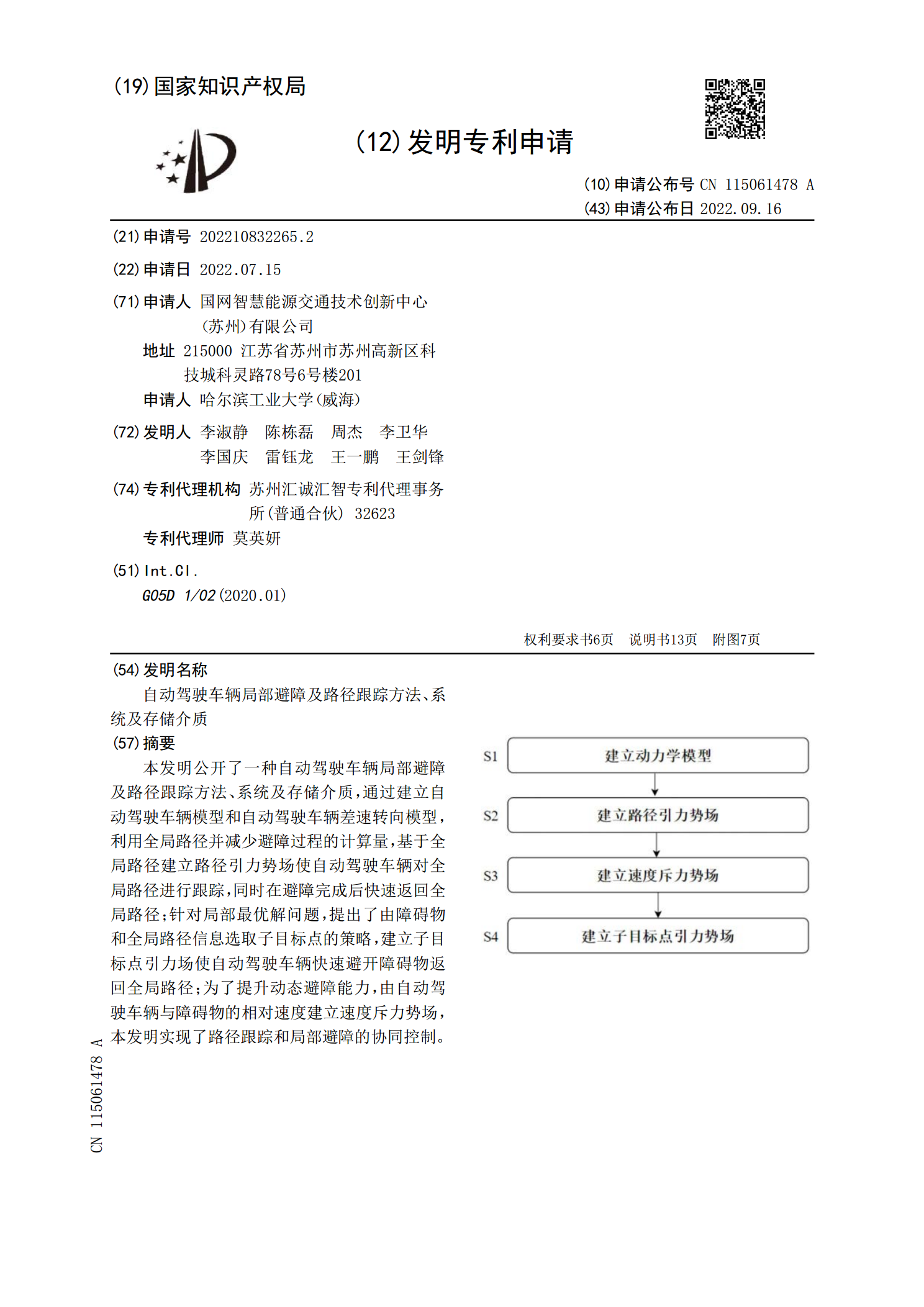
本发明公开了一种自动驾驶车辆局部避障及路径跟踪方法、系统及存储介质,通过建立自动驾驶车辆模型和自动驾驶车辆差速转向模型,利用全局路径并减少避障过程的计算量,基于全局路径建立路径引力势场使自动驾驶车辆对全局路径进行跟踪,同时在避障完成后快速返回全局路径;针对局部最优解问题,提出了由障碍物和全局路径信息选取子目标点的策略,建立子目标点引力场使自动驾驶车辆快速避开障碍物返回全局路径;为了提升动态避障能力,由自动驾驶车辆与障碍物的相对速度建立速度斥力势场,本发明实现了路径跟踪和局部避障的协同控制。