
一种基于机器学习的AGV动态避障方法.pdf

努力****承悦

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于机器学习的AGV动态避障方法.pdf
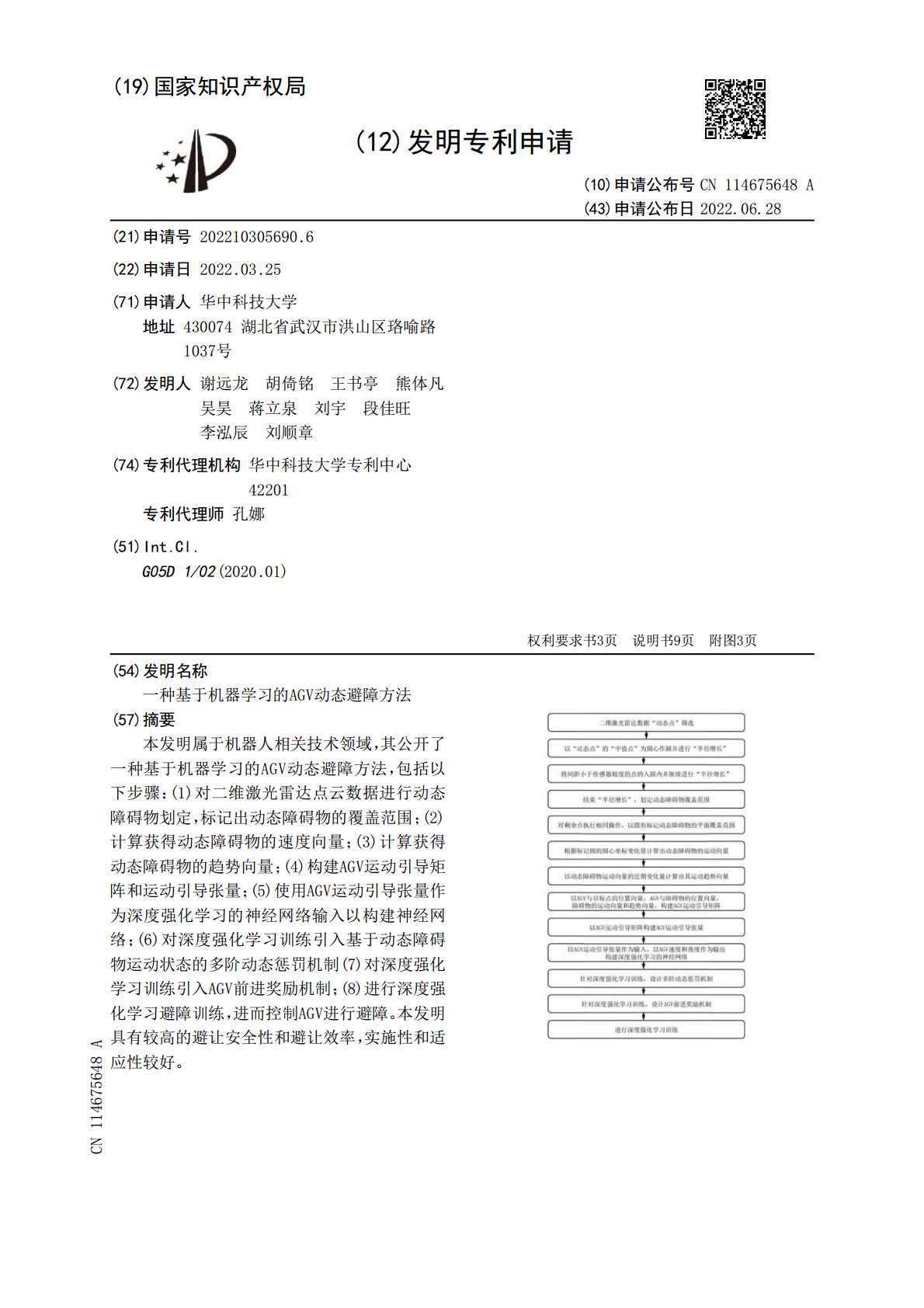
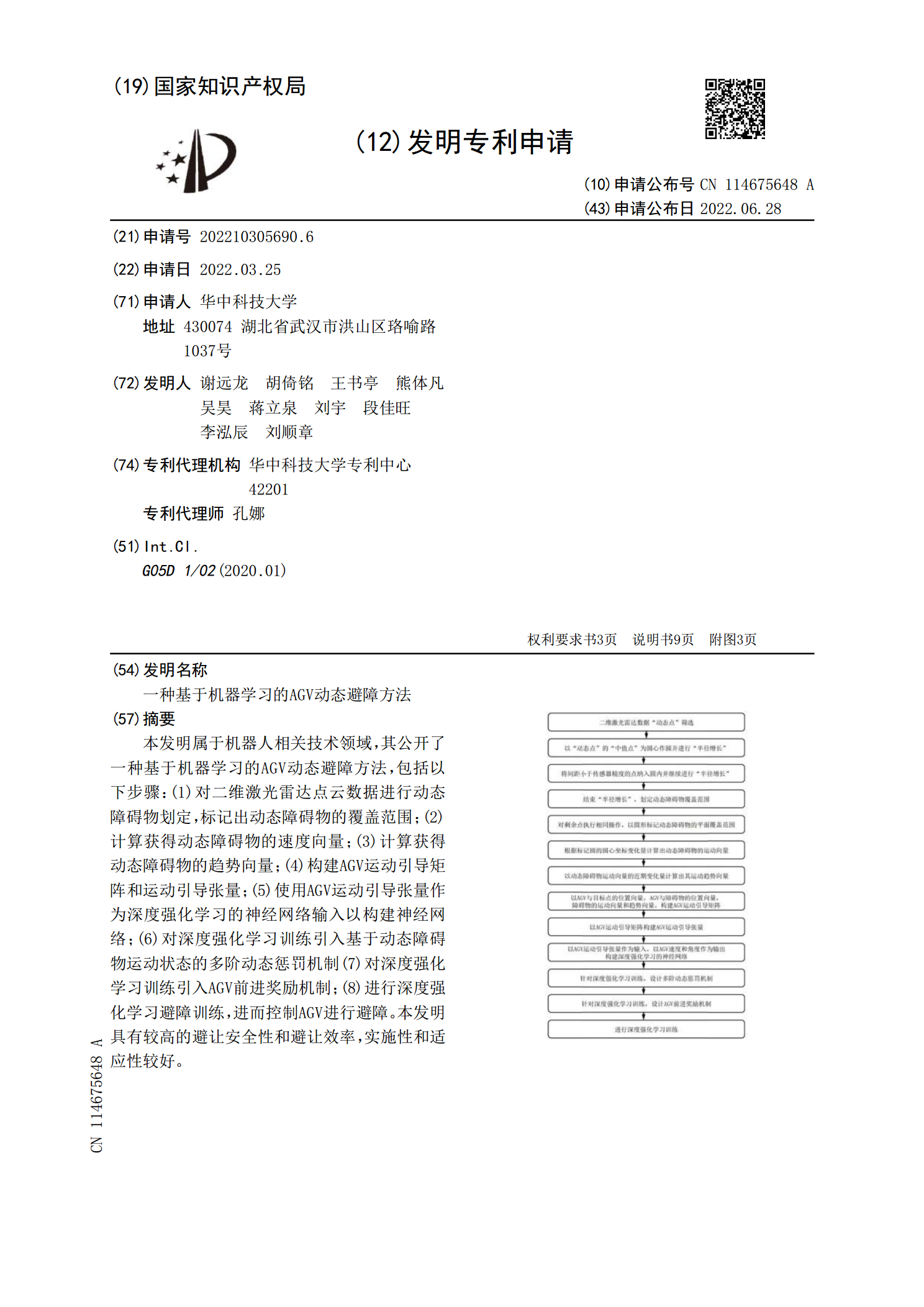
本发明属于机器人相关技术领域,其公开了一种基于机器学习的AGV动态避障方法,包括以下步骤:(1)对二维激光雷达点云数据进行动态障碍物划定,标记出动态障碍物的覆盖范围;(2)计算获得动态障碍物的速度向量;(3)计算获得动态障碍物的趋势向量;(4)构建AGV运动引导矩阵和运动引导张量;(5)使用AGV运动引导张量作为深度强化学习的神经网络输入以构建神经网络;(6)对深度强化学习训练引入基于动态障碍物运动状态的多阶动态惩罚机制(7)对深度强化学习训练引入AGV前进奖励机制;(8)进行深度强化学习避障训练,进而控
一种基于人工势场法的AGV动态避障方法.pdf
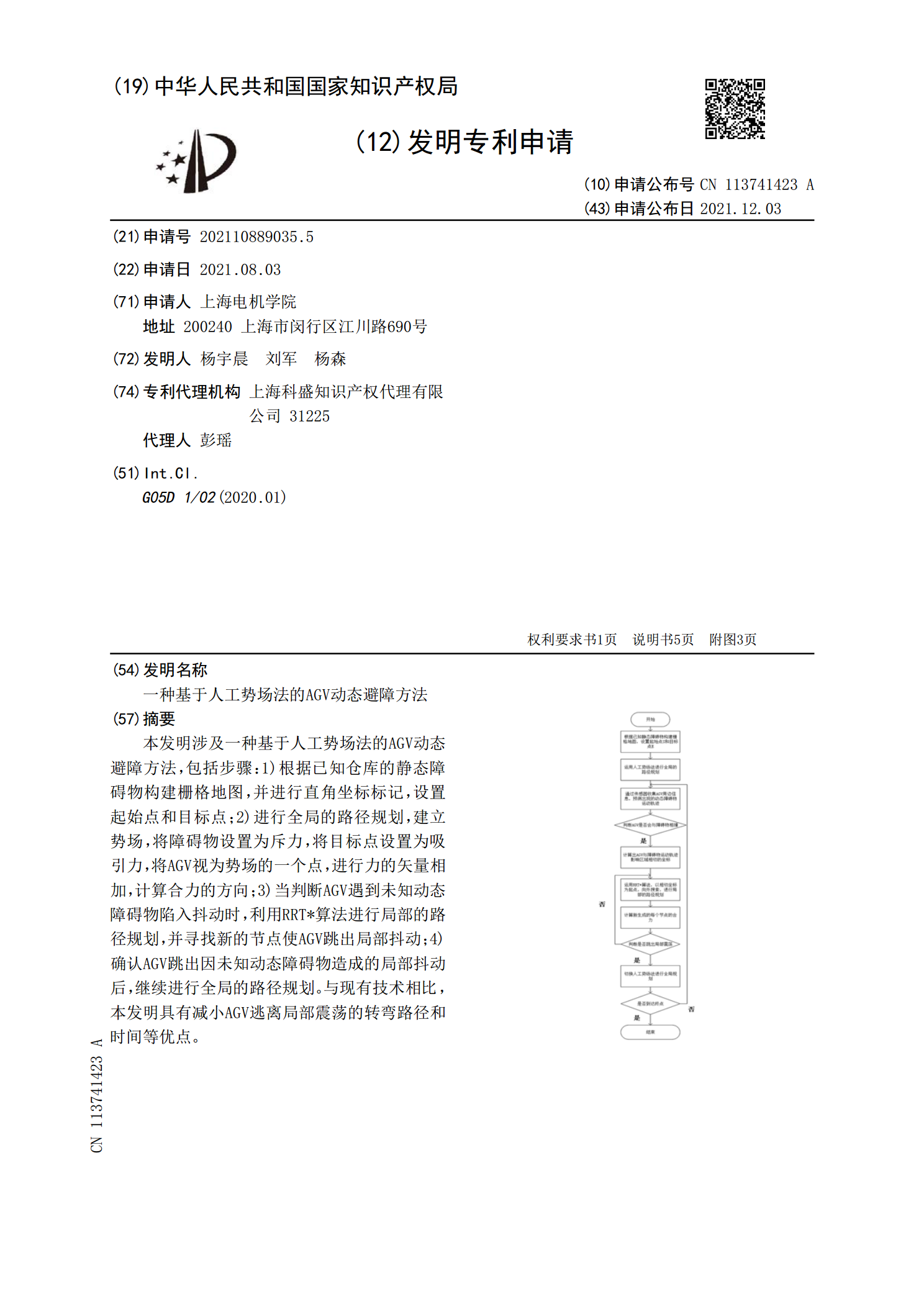
本发明涉及一种基于人工势场法的AGV动态避障方法,包括步骤:1)根据已知仓库的静态障碍物构建栅格地图,并进行直角坐标标记,设置起始点和目标点;2)进行全局的路径规划,建立势场,将障碍物设置为斥力,将目标点设置为吸引力,将AGV视为势场的一个点,进行力的矢量相加,计算合力的方向;3)当判断AGV遇到未知动态障碍物陷入抖动时,利用RRT*算法进行局部的路径规划,并寻找新的节点使AGV跳出局部抖动;4)确认AGV跳出因未知动态障碍物造成的局部抖动后,继续进行全局的路径规划。与现有技术相比,本发明具有减小AGV逃
一种AGV小车自动避障方法及避障系统.pdf
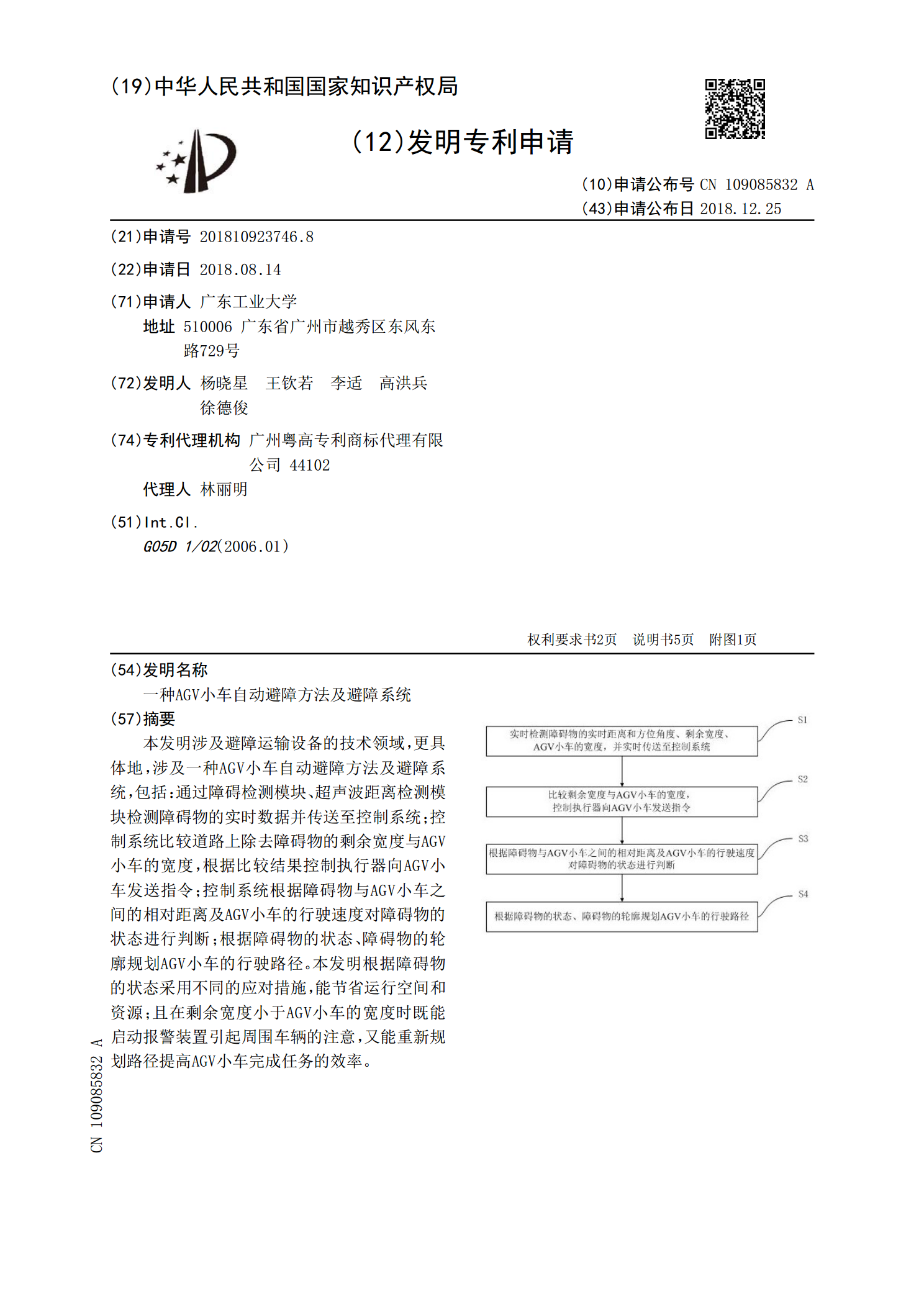
本发明涉及避障运输设备的技术领域,更具体地,涉及一种AGV小车自动避障方法及避障系统,包括:通过障碍检测模块、超声波距离检测模块检测障碍物的实时数据并传送至控制系统;控制系统比较道路上除去障碍物的剩余宽度与AGV小车的宽度,根据比较结果控制执行器向AGV小车发送指令;控制系统根据障碍物与AGV小车之间的相对距离及AGV小车的行驶速度对障碍物的状态进行判断;根据障碍物的状态、障碍物的轮廓规划AGV小车的行驶路径。本发明根据障碍物的状态采用不同的应对措施,能节省运行空间和资源;且在剩余宽度小于AGV小车的宽度
一种基于避障机器人的控制方法.pdf
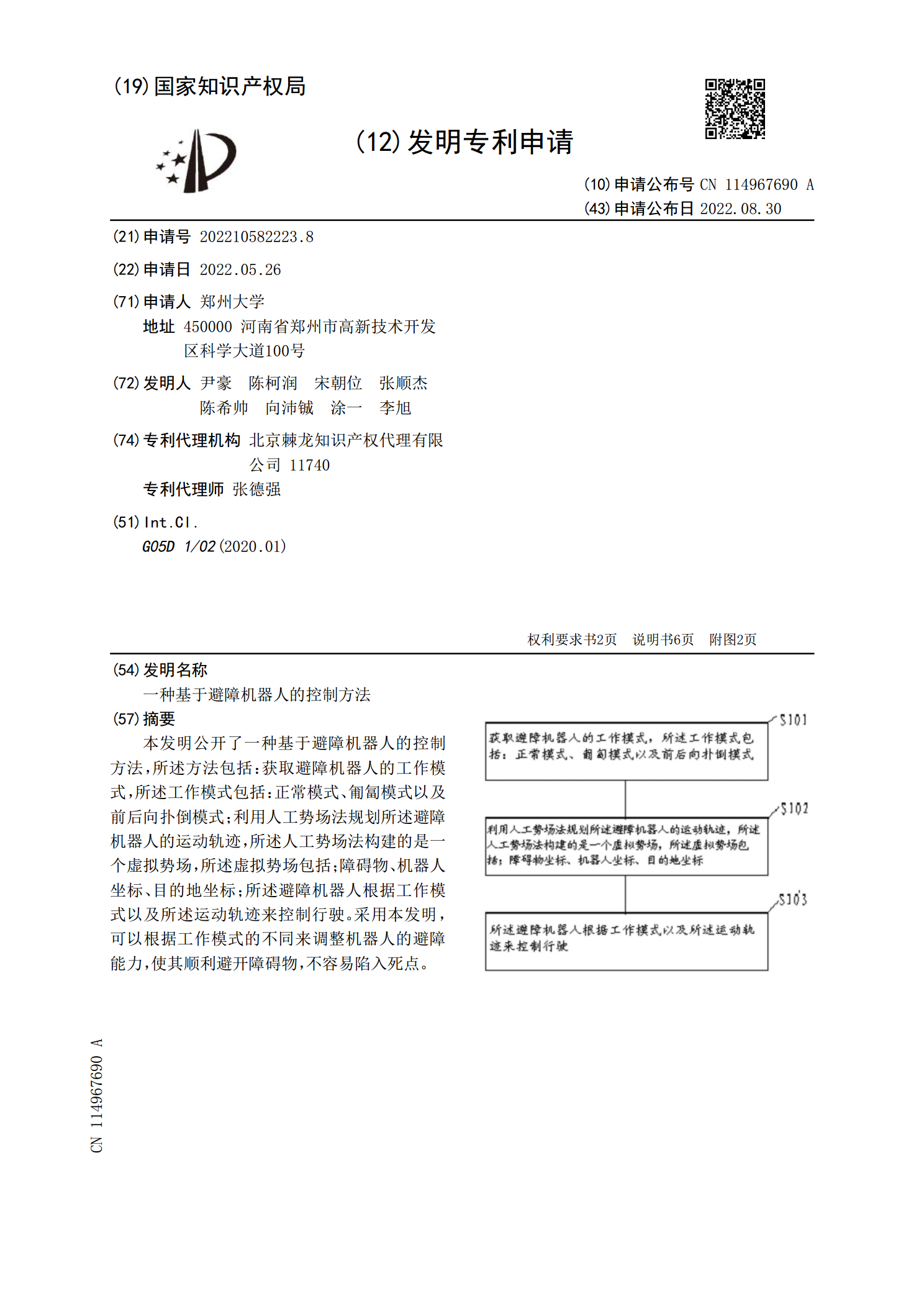
本发明公开了一种基于避障机器人的控制方法,所述方法包括:获取避障机器人的工作模式,所述工作模式包括:正常模式、匍匐模式以及前后向扑倒模式;利用人工势场法规划所述避障机器人的运动轨迹,所述人工势场法构建的是一个虚拟势场,所述虚拟势场包括;障碍物、机器人坐标、目的地坐标;所述避障机器人根据工作模式以及所述运动轨迹来控制行驶。采用本发明,可以根据工作模式的不同来调整机器人的避障能力,使其顺利避开障碍物,不容易陷入死点。
一种机器人动态避障方法、装置和机器人.pdf
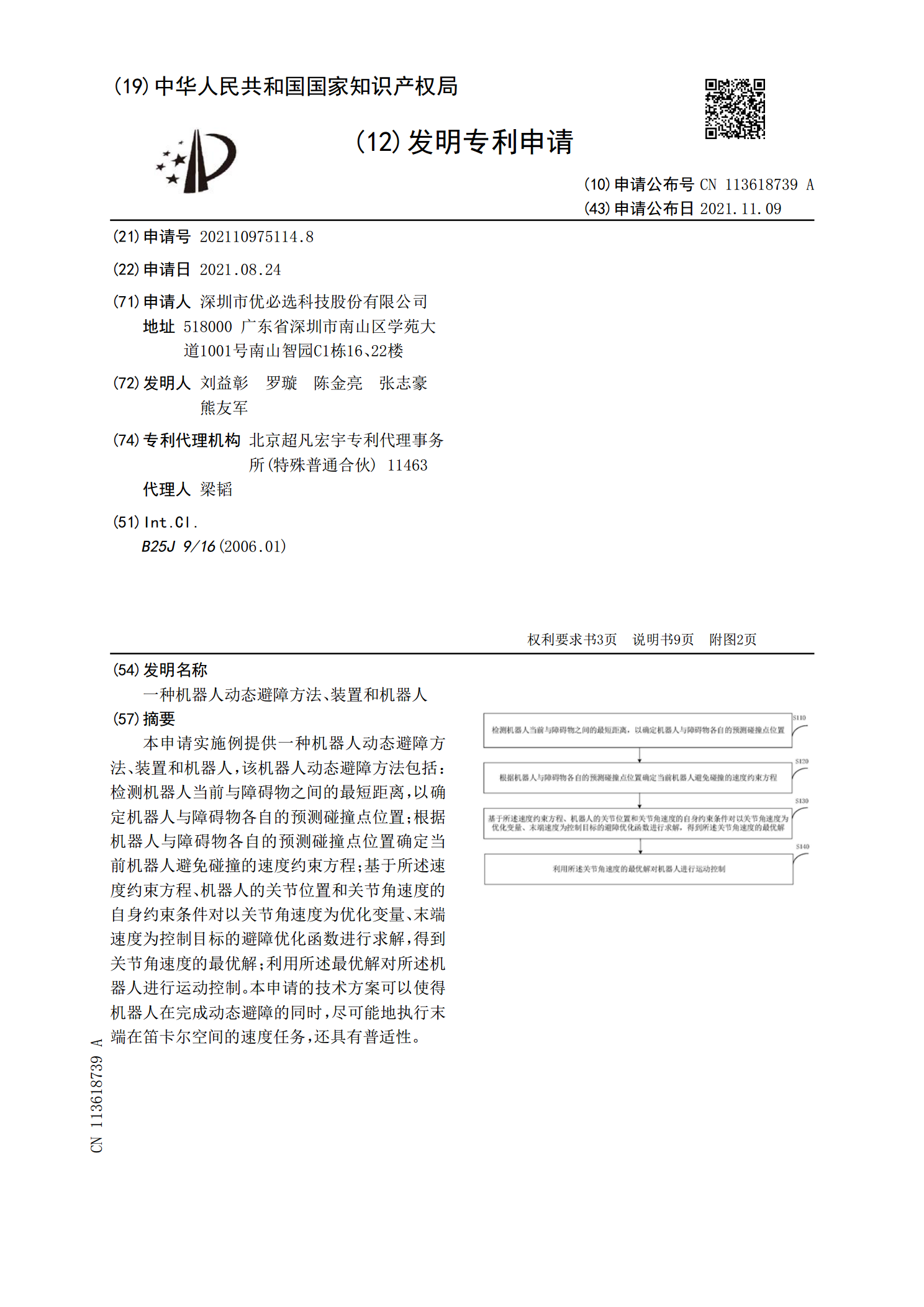
本申请实施例提供一种机器人动态避障方法、装置和机器人,该机器人动态避障方法包括:检测机器人当前与障碍物之间的最短距离,以确定机器人与障碍物各自的预测碰撞点位置;根据机器人与障碍物各自的预测碰撞点位置确定当前机器人避免碰撞的速度约束方程;基于所述速度约束方程、机器人的关节位置和关节角速度的自身约束条件对以关节角速度为优化变量、末端速度为控制目标的避障优化函数进行求解,得到关节角速度的最优解;利用所述最优解对所述机器人进行运动控制。本申请的技术方案可以使得机器人在完成动态避障的同时,尽可能地执行末端在笛卡尔空