
一种基于自动驾驶的避障方法和装置.pdf

篷璐****爱吗

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于自动驾驶的避障方法和装置.pdf
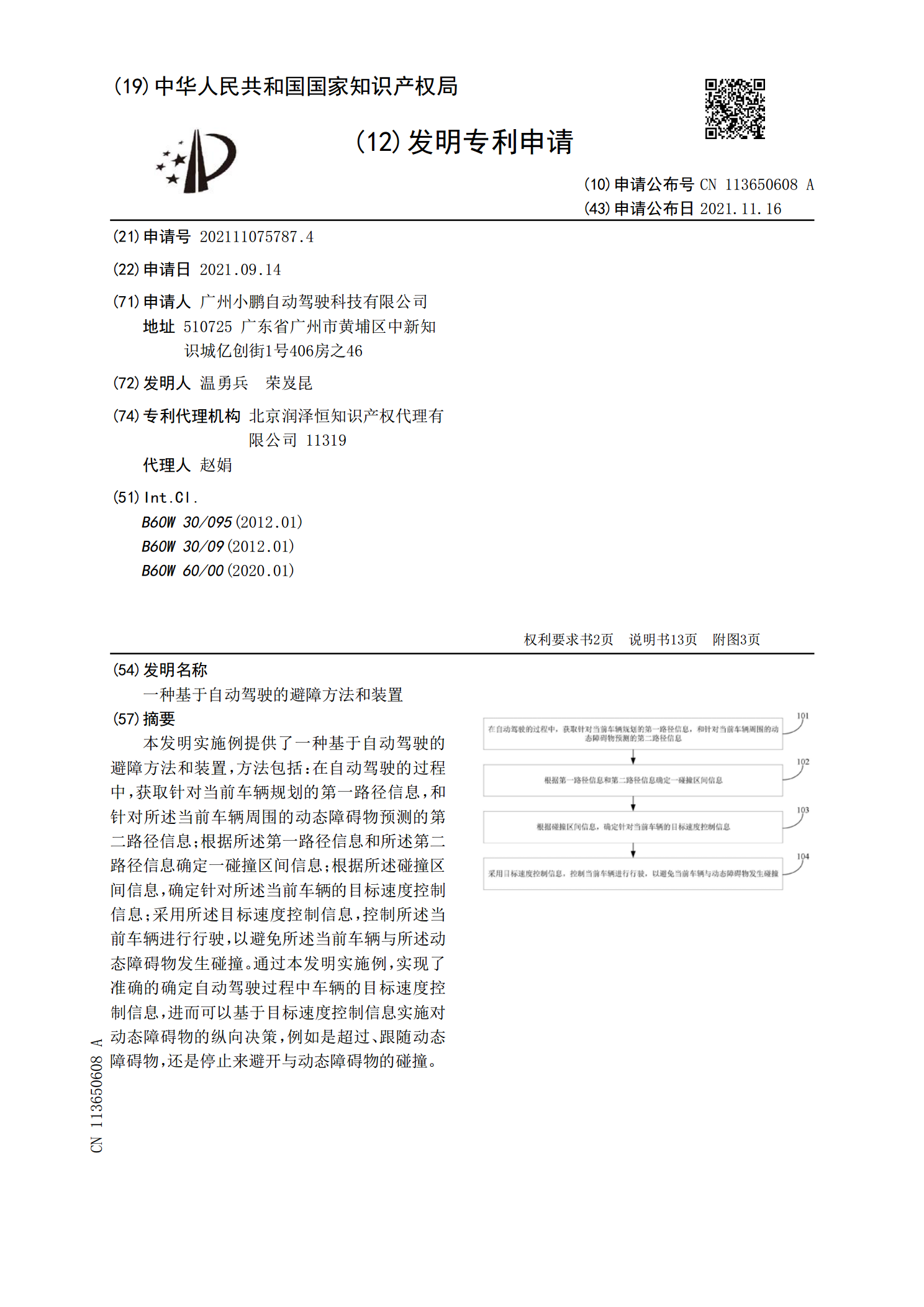
本发明实施例提供了一种基于自动驾驶的避障方法和装置,方法包括:在自动驾驶的过程中,获取针对当前车辆规划的第一路径信息,和针对所述当前车辆周围的动态障碍物预测的第二路径信息;根据所述第一路径信息和所述第二路径信息确定一碰撞区间信息;根据所述碰撞区间信息,确定针对所述当前车辆的目标速度控制信息;采用所述目标速度控制信息,控制所述当前车辆进行行驶,以避免所述当前车辆与所述动态障碍物发生碰撞。通过本发明实施例,实现了准确的确定自动驾驶过程中车辆的目标速度控制信息,进而可以基于目标速度控制信息实施对动态障碍物的纵向
田埂避障控制方法、装置和农用自动驾驶设备.pdf
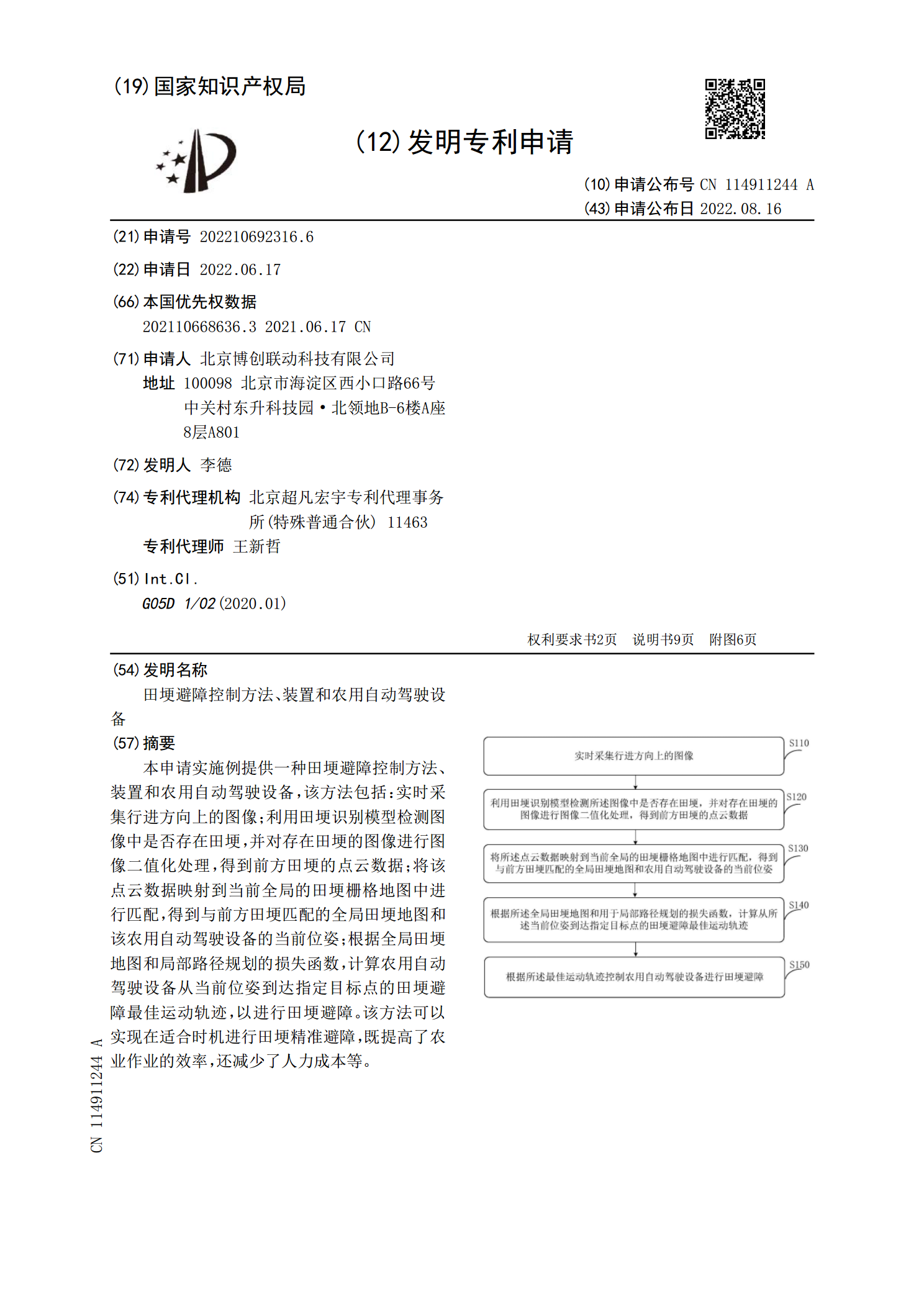
本申请实施例提供一种田埂避障控制方法、装置和农用自动驾驶设备,该方法包括:实时采集行进方向上的图像;利用田埂识别模型检测图像中是否存在田埂,并对存在田埂的图像进行图像二值化处理,得到前方田埂的点云数据;将该点云数据映射到当前全局的田埂栅格地图中进行匹配,得到与前方田埂匹配的全局田埂地图和该农用自动驾驶设备的当前位姿;根据全局田埂地图和局部路径规划的损失函数,计算农用自动驾驶设备从当前位姿到达指定目标点的田埂避障最佳运动轨迹,以进行田埂避障。该方法可以实现在适合时机进行田埂精准避障,既提高了农业作业的效率,
一种自动驾驶车辆避障方法、装置及设备.pdf
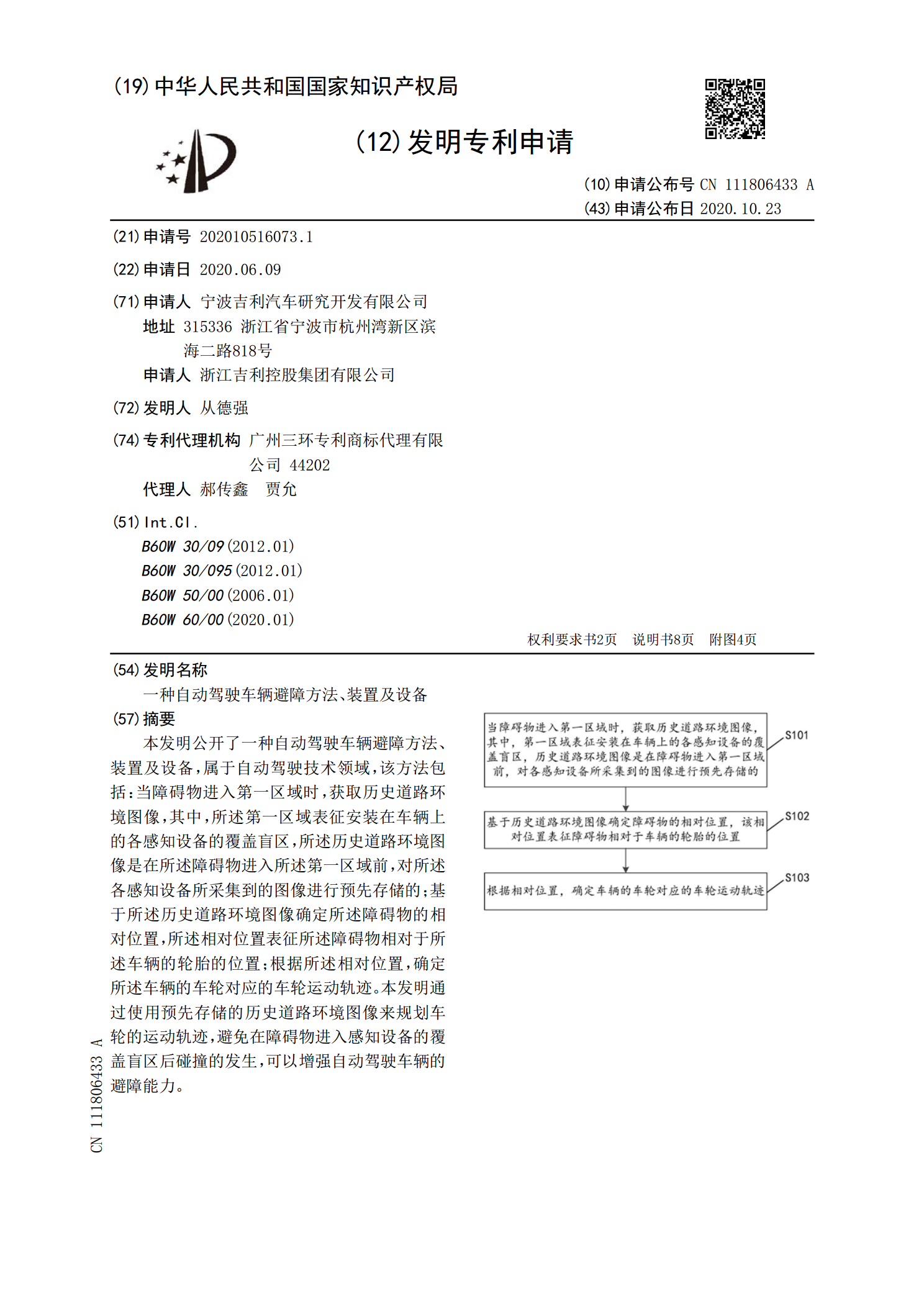
本发明公开了一种自动驾驶车辆避障方法、装置及设备,属于自动驾驶技术领域,该方法包括:当障碍物进入第一区域时,获取历史道路环境图像,其中,所述第一区域表征安装在车辆上的各感知设备的覆盖盲区,所述历史道路环境图像是在所述障碍物进入所述第一区域前,对所述各感知设备所采集到的图像进行预先存储的;基于所述历史道路环境图像确定所述障碍物的相对位置,所述相对位置表征所述障碍物相对于所述车辆的轮胎的位置;根据所述相对位置,确定所述车辆的车轮对应的车轮运动轨迹。本发明通过使用预先存储的历史道路环境图像来规划车轮的运动轨迹,
一种基于动态轨迹规划的自动驾驶连续避障方法.pdf
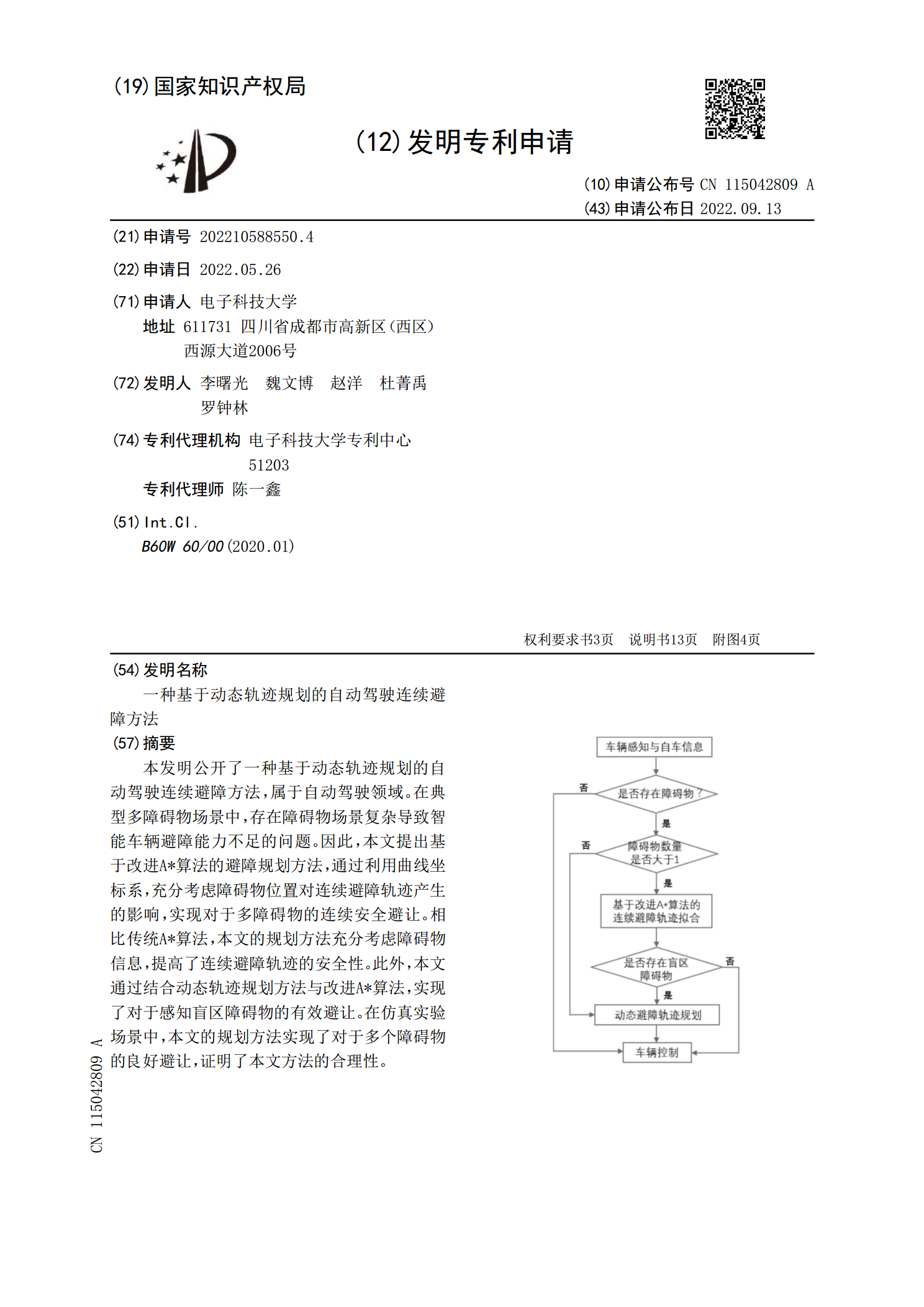
本发明公开了一种基于动态轨迹规划的自动驾驶连续避障方法,属于自动驾驶领域。在典型多障碍物场景中,存在障碍物场景复杂导致智能车辆避障能力不足的问题。因此,本文提出基于改进A*算法的避障规划方法,通过利用曲线坐标系,充分考虑障碍物位置对连续避障轨迹产生的影响,实现对于多障碍物的连续安全避让。相比传统A*算法,本文的规划方法充分考虑障碍物信息,提高了连续避障轨迹的安全性。此外,本文通过结合动态轨迹规划方法与改进A*算法,实现了对于感知盲区障碍物的有效避让。在仿真实验场景中,本文的规划方法实现了对于多个障碍物的良
一种盲人避障装置及其避障提示方法.pdf
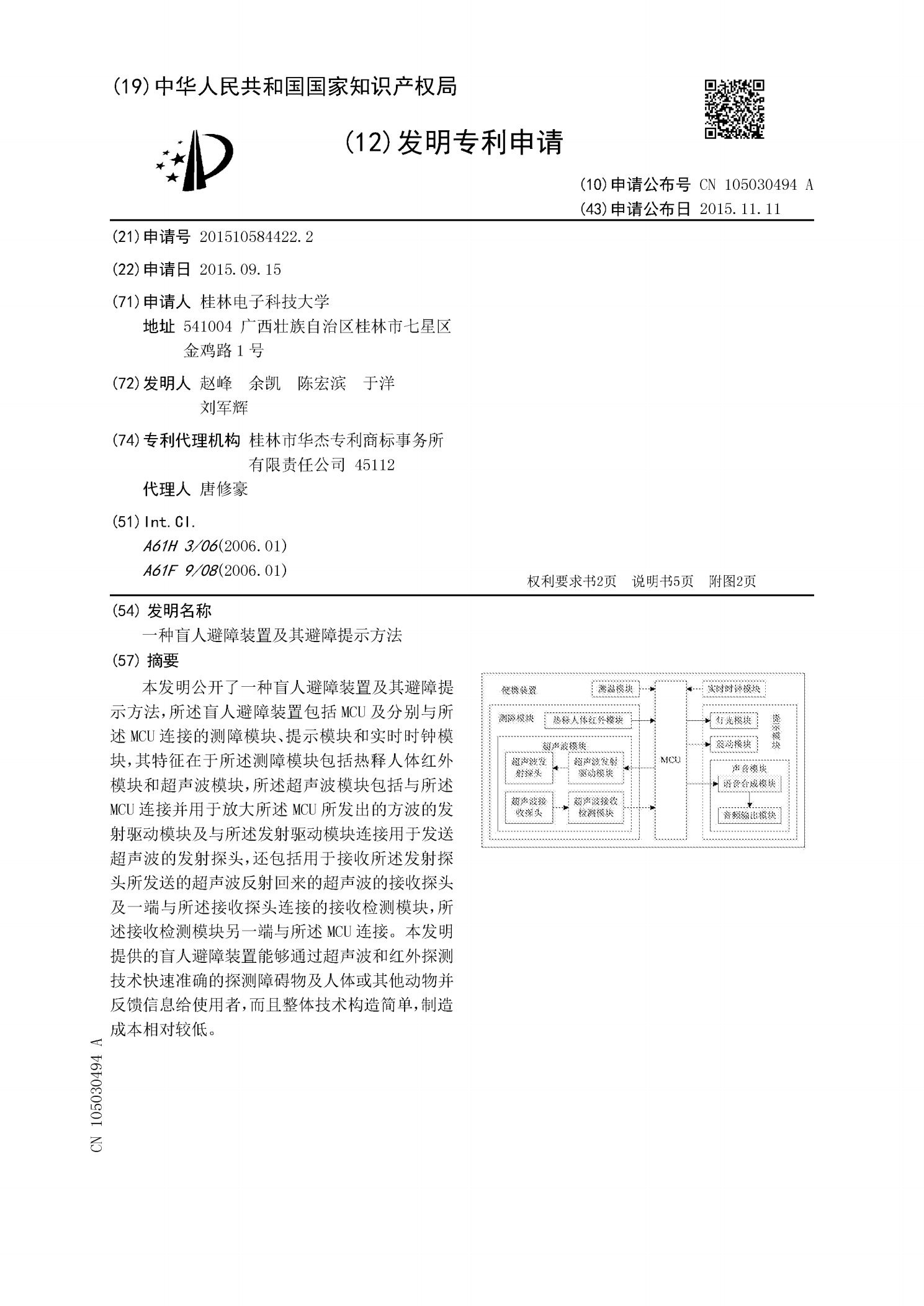
本发明公开了一种盲人避障装置及其避障提示方法,所述盲人避障装置包括MCU及分别与所述MCU连接的测障模块、提示模块和实时时钟模块,其特征在于所述测障模块包括热释人体红外模块和超声波模块,所述超声波模块包括与所述MCU连接并用于放大所述MCU所发出的方波的发射驱动模块及与所述发射驱动模块连接用于发送超声波的发射探头,还包括用于接收所述发射探头所发送的超声波反射回来的超声波的接收探头及一端与所述接收探头连接的接收检测模块,所述接收检测模块另一端与所述MCU连接。本发明提供的盲人避障装置能够通过超声波和红外探测