
一种基于双目相机的车辆盲区障碍物示警方法及终端.pdf

Ch****91


1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于双目相机的车辆盲区障碍物示警方法及终端.pdf
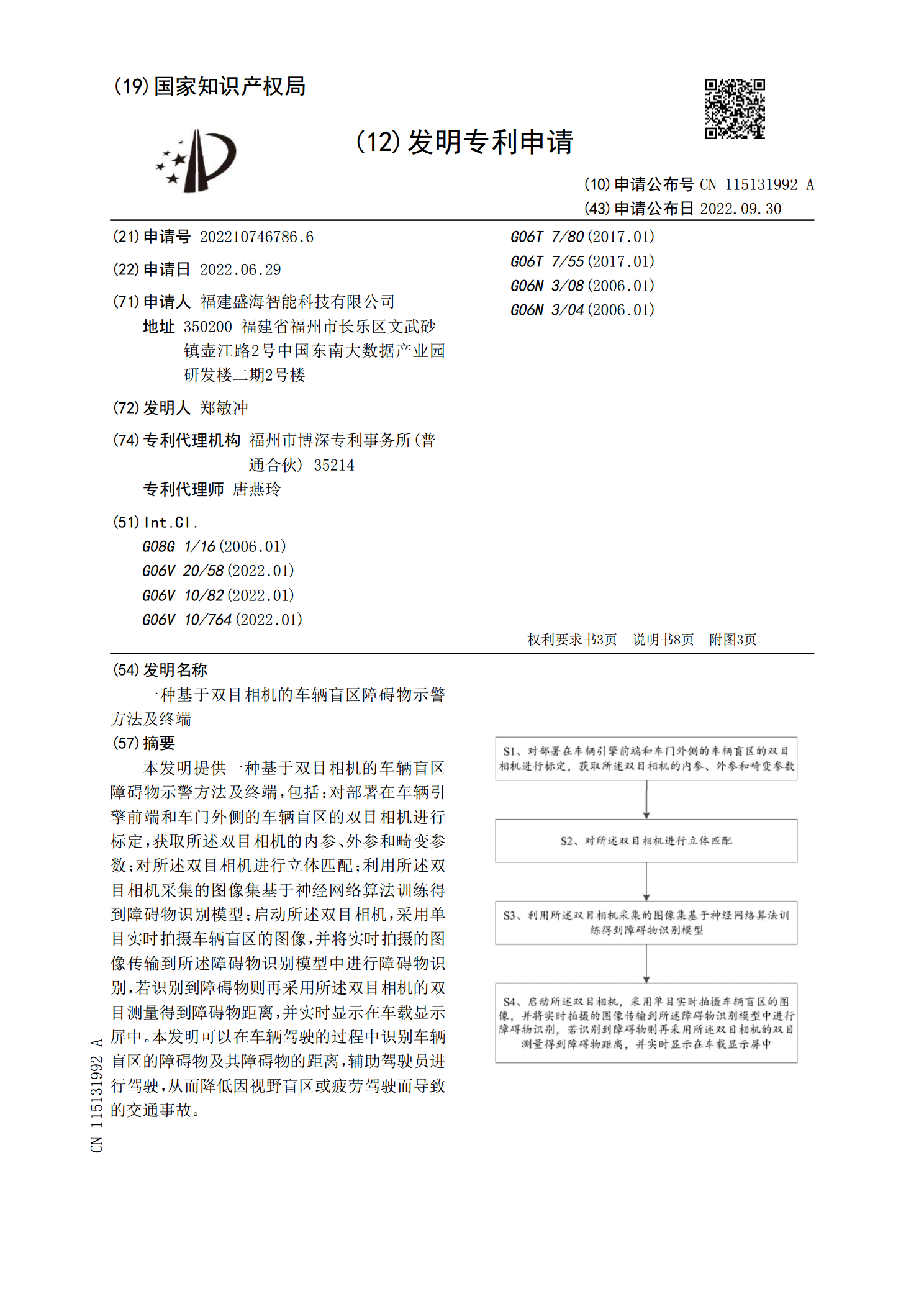
本发明提供一种基于双目相机的车辆盲区障碍物示警方法及终端,包括:对部署在车辆引擎前端和车门外侧的车辆盲区的双目相机进行标定,获取所述双目相机的内参、外参和畸变参数;对所述双目相机进行立体匹配;利用所述双目相机采集的图像集基于神经网络算法训练得到障碍物识别模型;启动所述双目相机,采用单目实时拍摄车辆盲区的图像,并将实时拍摄的图像传输到所述障碍物识别模型中进行障碍物识别,若识别到障碍物则再采用所述双目相机的双目测量得到障碍物距离,并实时显示在车载显示屏中。本发明可以在车辆驾驶的过程中识别车辆盲区的障碍物及其障

一种双目相机盲区内的障碍物检测方法、装置及设备.pdf
本申请实施例公开了一种双目相机盲区内的障碍物检测方法、装置及设备。本申请实施例会自动检测双目相机盲区是否进入了目标障碍物,并在检测出双目相机盲区进入了目标障碍物的情况下,会自适应在当前深度图中补全目标障碍物的障碍物信息,以基于当前深度图中的障碍物信息进行障碍物检测,这实现了即使双目相机盲区内有目标障碍物,也能检测出该目标障碍物,避免发生碰撞的风险。

一种基于双目相机的车前行人测距方法及终端.pdf
本发明提供一种基于双目相机的车前行人测距方法及终端,包括:对部署在车辆外侧顶端的双目相机进行标定和立体匹配,并基于双目相机预先拍摄的行人视频集训练得到行人识别模型;启动双目相机,采用行人识别模型对双目相机实时拍摄的车前图像进行行人目标识别,若识别到行人目标则提取行人目标在当前车前图像上的ROI区域,并去除遮挡物后得到ROI深度图;随机提取行人目标的多个关键节点,并在ROI深度图中获取各个关键节点的深度信息,以各个关键节点的深度信息的均值作为行人距离,并将识别到行人目标的车前图像和行人距离实时显示在车载显示
基于行驶车辆的盲区检测方法、装置、终端及车辆.pdf
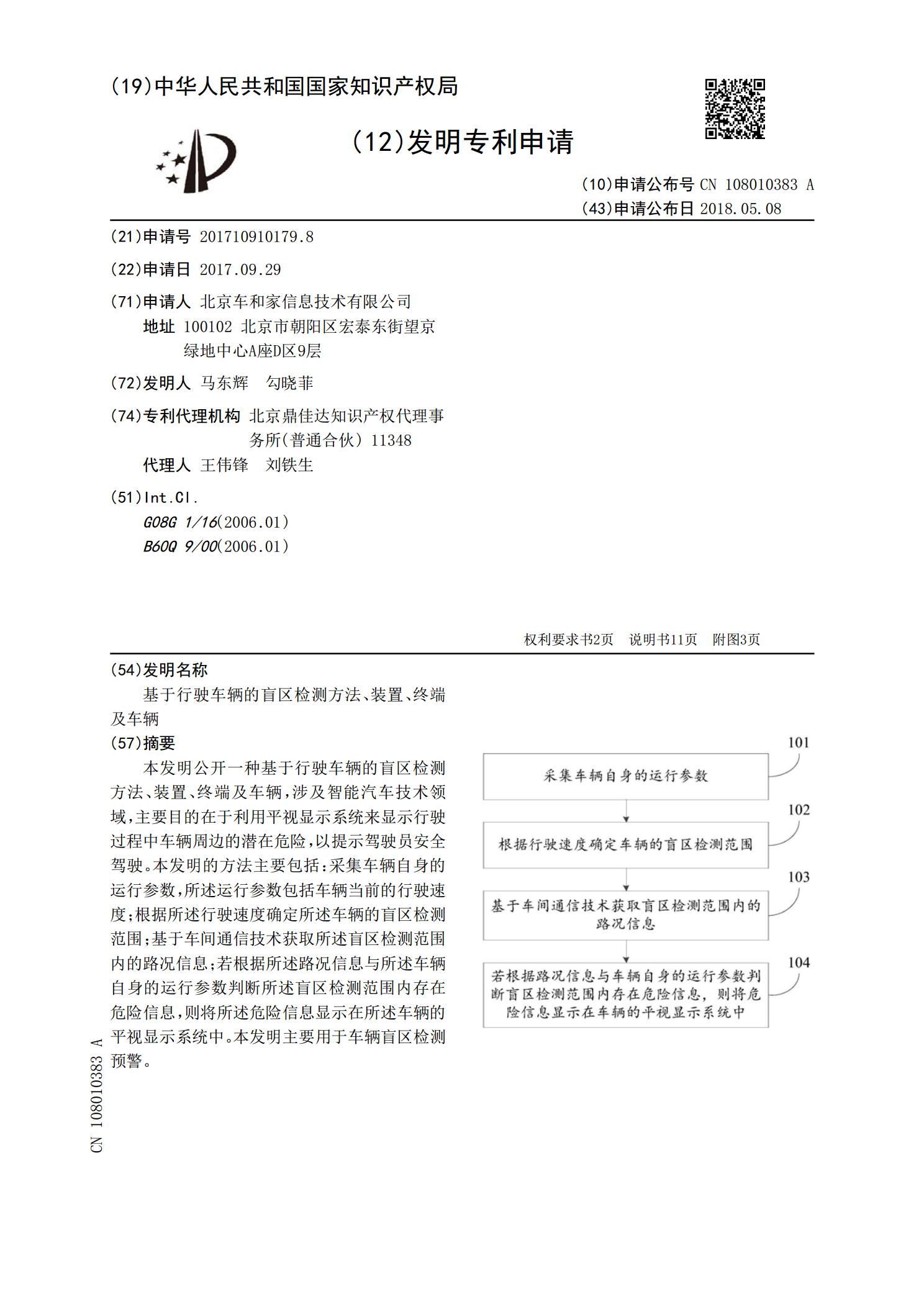
本发明公开一种基于行驶车辆的盲区检测方法、装置、终端及车辆,涉及智能汽车技术领域,主要目的在于利用平视显示系统来显示行驶过程中车辆周边的潜在危险,以提示驾驶员安全驾驶。本发明的方法主要包括:采集车辆自身的运行参数,所述运行参数包括车辆当前的行驶速度;根据所述行驶速度确定所述车辆的盲区检测范围;基于车间通信技术获取所述盲区检测范围内的路况信息;若根据所述路况信息与所述车辆自身的运行参数判断所述盲区检测范围内存在危险信息,则将所述危险信息显示在所述车辆的平视显示系统中。本发明主要用于车辆盲区检测预警。
一种基于汽车环视相机的盲区中车辆监测方法及系统.pdf
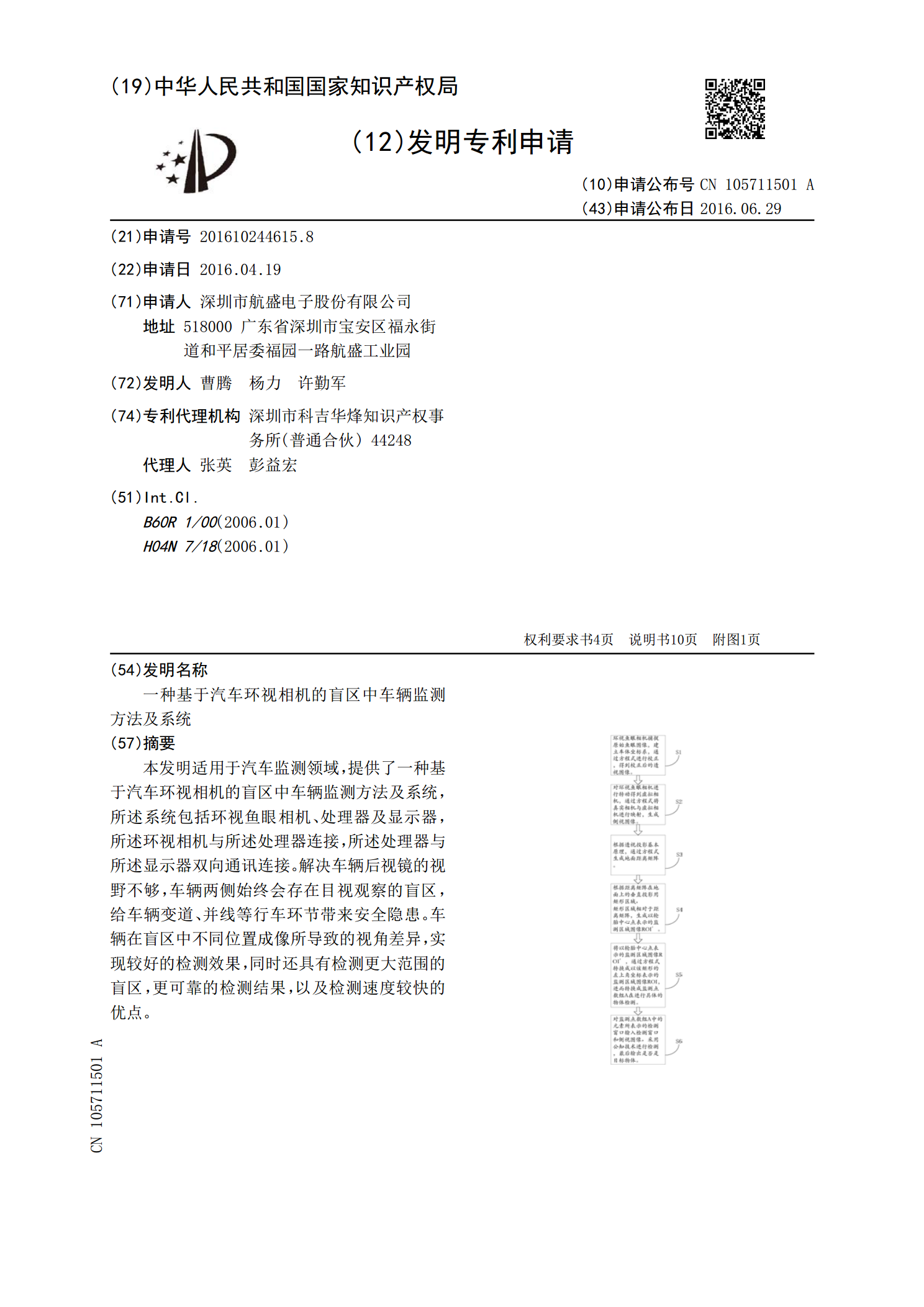
本发明适用于汽车监测领域,提供了一种基于汽车环视相机的盲区中车辆监测方法及系统,所述系统包括环视鱼眼相机、处理器及显示器,所述环视相机与所述处理器连接,所述处理器与所述显示器双向通讯连接。解决车辆后视镜的视野不够,车辆两侧始终会存在目视观察的盲区,给车辆变道、并线等行车环节带来安全隐患。车辆在盲区中不同位置成像所导致的视角差异,实现较好的检测效果,同时还具有检测更大范围的盲区,更可靠的检测结果,以及检测速度较快的优点。