
一种基于汽车环视相机的盲区中车辆监测方法及系统.pdf

英瑞****写意

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于汽车环视相机的盲区中车辆监测方法及系统.pdf
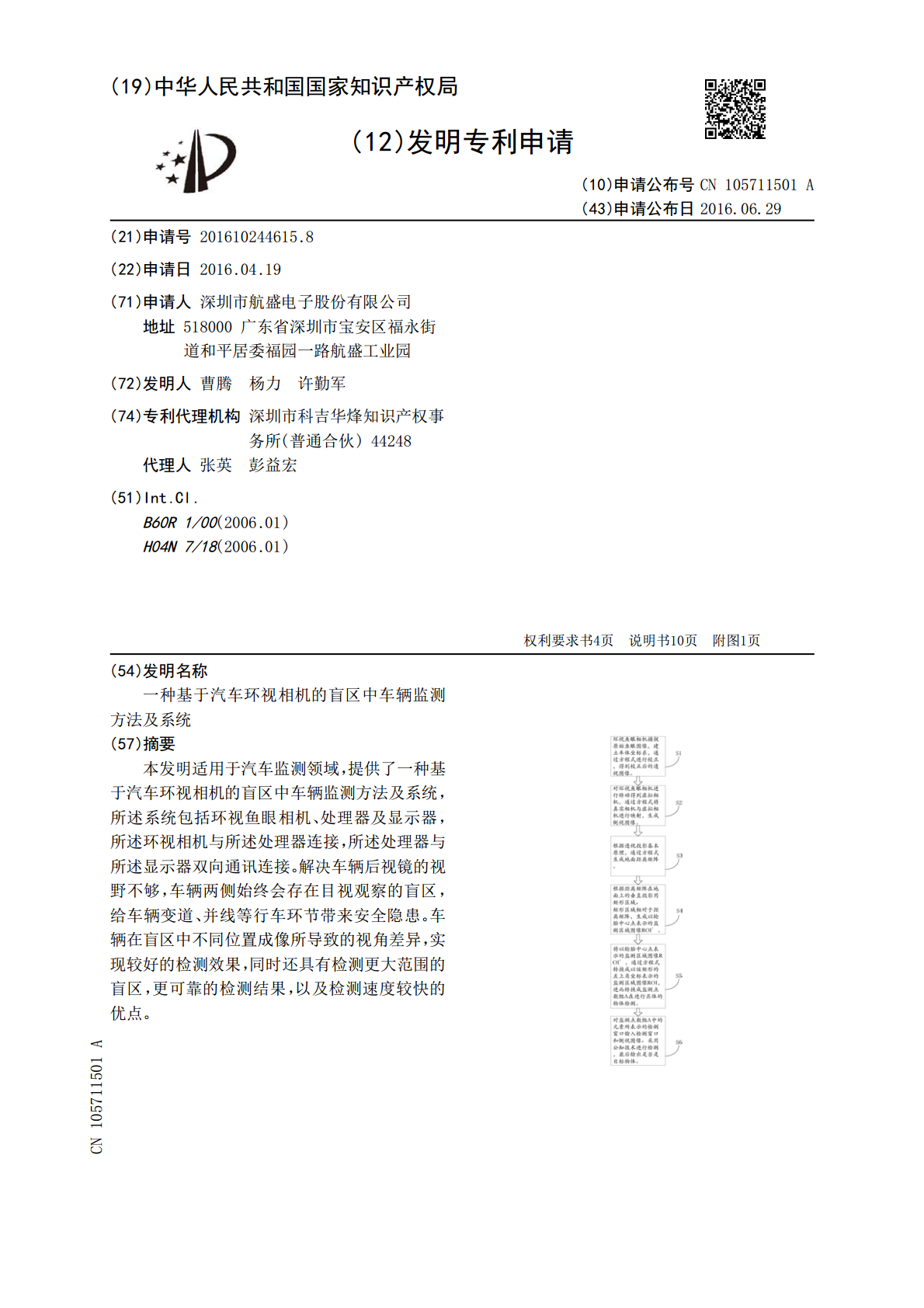
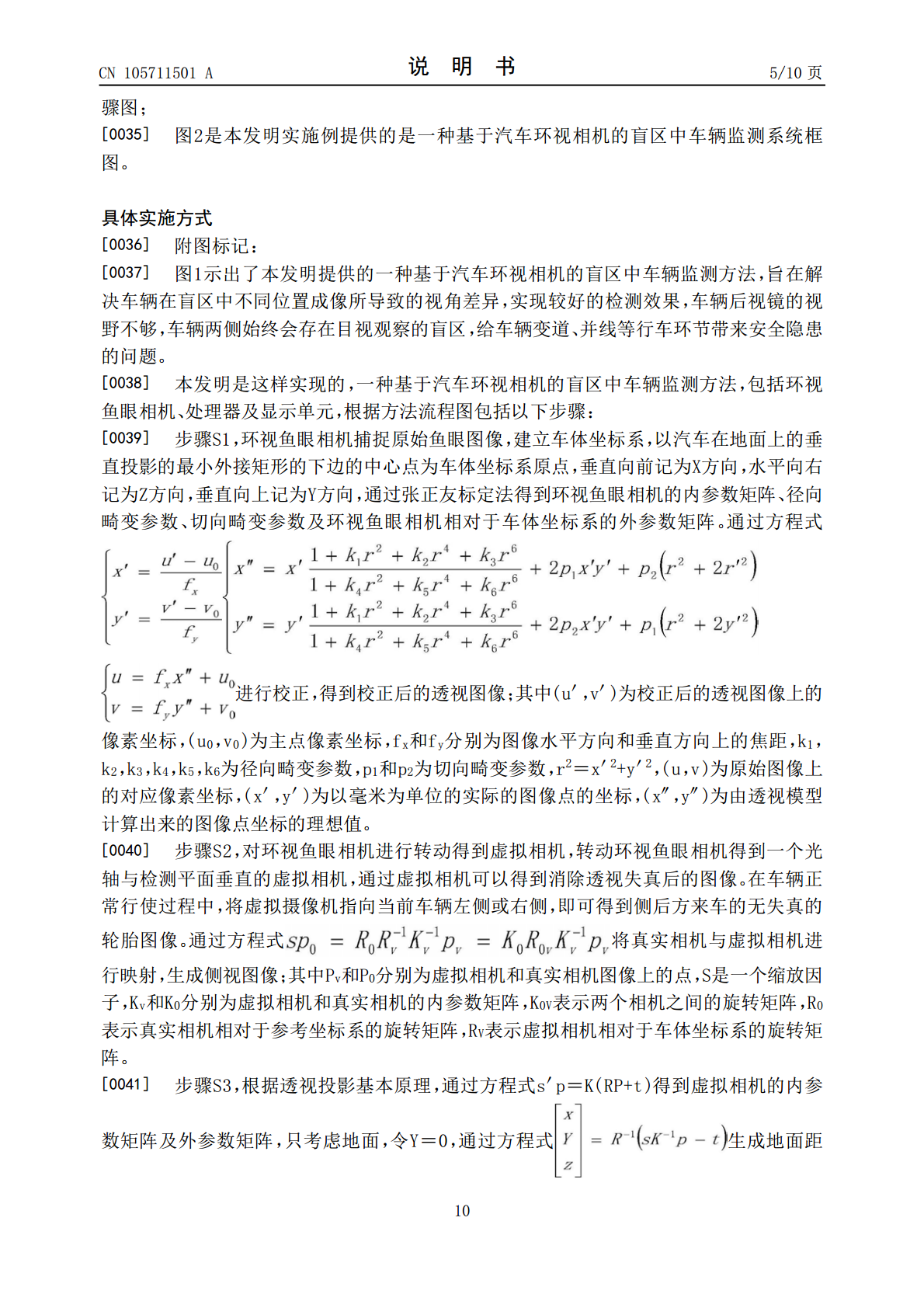
本发明适用于汽车监测领域,提供了一种基于汽车环视相机的盲区中车辆监测方法及系统,所述系统包括环视鱼眼相机、处理器及显示器,所述环视相机与所述处理器连接,所述处理器与所述显示器双向通讯连接。解决车辆后视镜的视野不够,车辆两侧始终会存在目视观察的盲区,给车辆变道、并线等行车环节带来安全隐患。车辆在盲区中不同位置成像所导致的视角差异,实现较好的检测效果,同时还具有检测更大范围的盲区,更可靠的检测结果,以及检测速度较快的优点。

一种基于环卫车辆环视系统的盲区预警方法和装置.pdf
本发明公开了一种基于环卫车辆环视系统的盲区预警方法和装置,通过环卫车辆的环视相机构建视觉里程计,并运用多相机信息完成尺度恢复计算,实现对环卫车辆盲区的三维感知,随后运用空间哈希表和欧几里得聚类算法实现对三维点云数据的快速处理,并采用分离轴定理的碰撞检测算法实现了车辆盲区检测功能,平衡了计算速度和计算精度的矛盾,保障环卫车辆在各种复杂工况下对车辆周边盲区的实时预警,具有很高的实用价值。
一种基于车辆盲区检测系统的汽车盲区检测方法.pdf
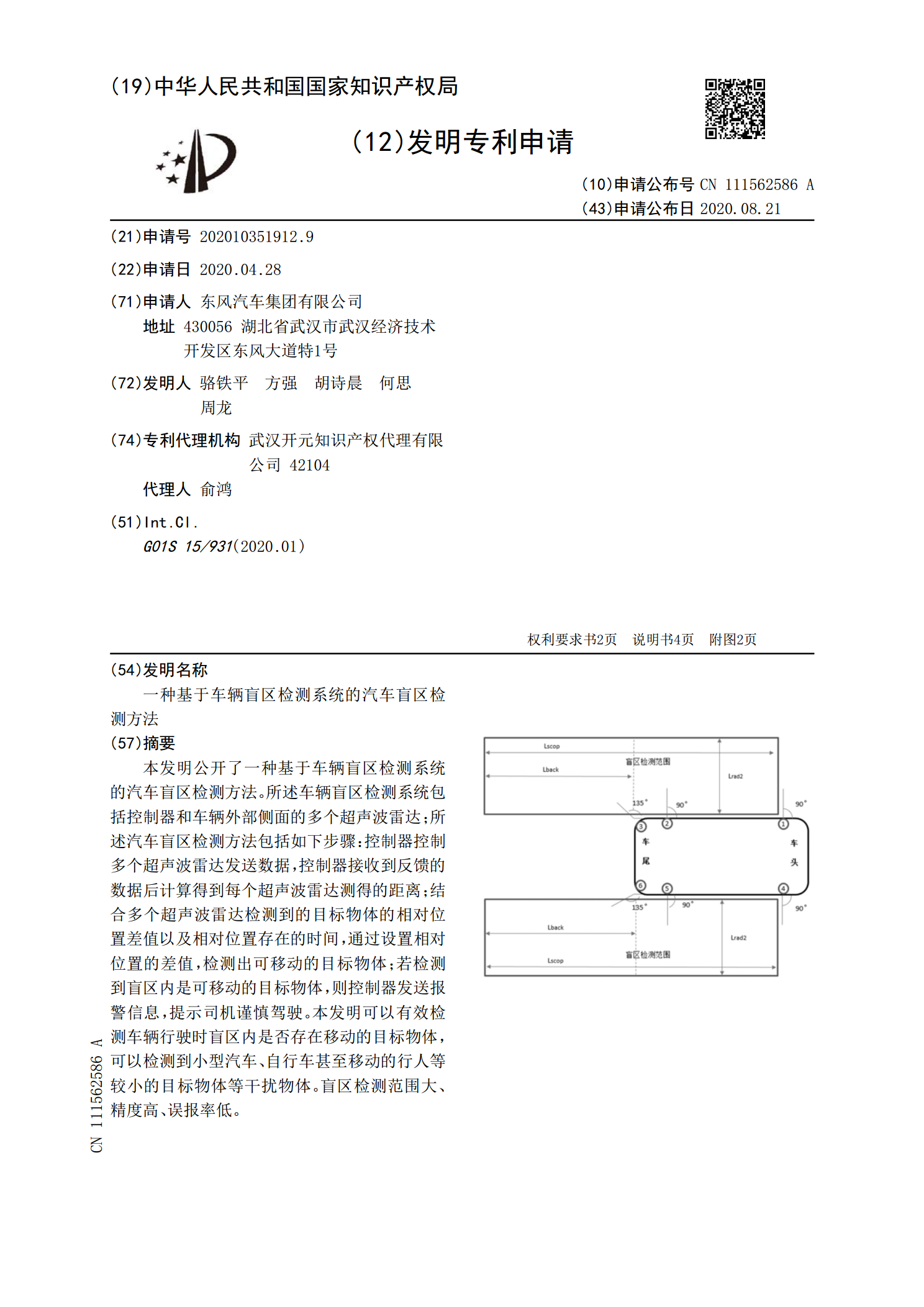
本发明公开了一种基于车辆盲区检测系统的汽车盲区检测方法。所述车辆盲区检测系统包括控制器和车辆外部侧面的多个超声波雷达;所述汽车盲区检测方法包括如下步骤:控制器控制多个超声波雷达发送数据,控制器接收到反馈的数据后计算得到每个超声波雷达测得的距离;结合多个超声波雷达检测到的目标物体的相对位置差值以及相对位置存在的时间,通过设置相对位置的差值,检测出可移动的目标物体;若检测到盲区内是可移动的目标物体,则控制器发送报警信息,提示司机谨慎驾驶。本发明可以有效检测车辆行驶时盲区内是否存在移动的目标物体,可以检测到小型
一种基于360度环视摄像头的盲区监测方法.pdf
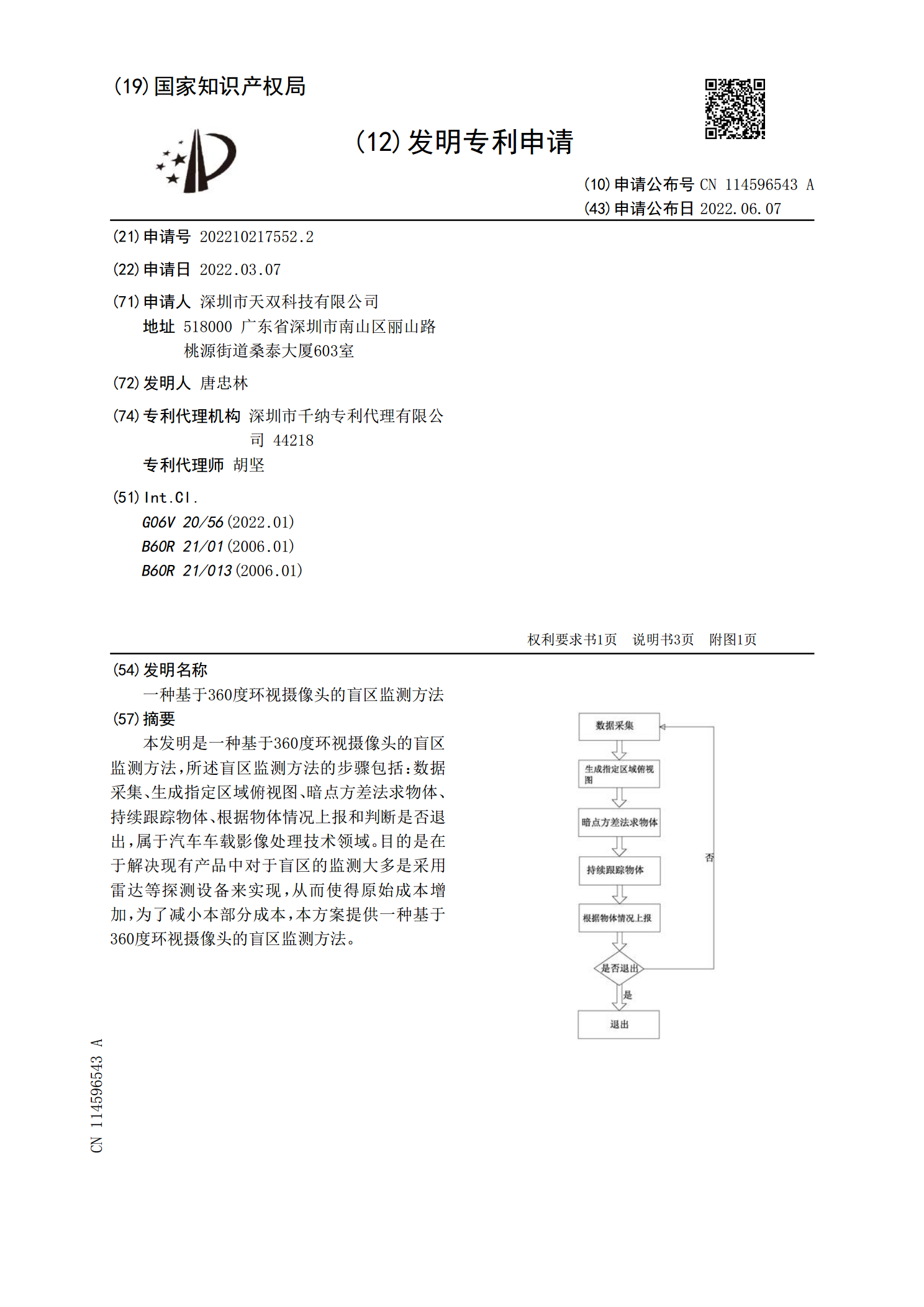
本发明是一种基于360度环视摄像头的盲区监测方法,所述盲区监测方法的步骤包括:数据采集、生成指定区域俯视图、暗点方差法求物体、持续跟踪物体、根据物体情况上报和判断是否退出,属于汽车车载影像处理技术领域。目的是在于解决现有产品中对于盲区的监测大多是采用雷达等探测设备来实现,从而使得原始成本增加,为了减小本部分成本,本方案提供一种基于360度环视摄像头的盲区监测方法。
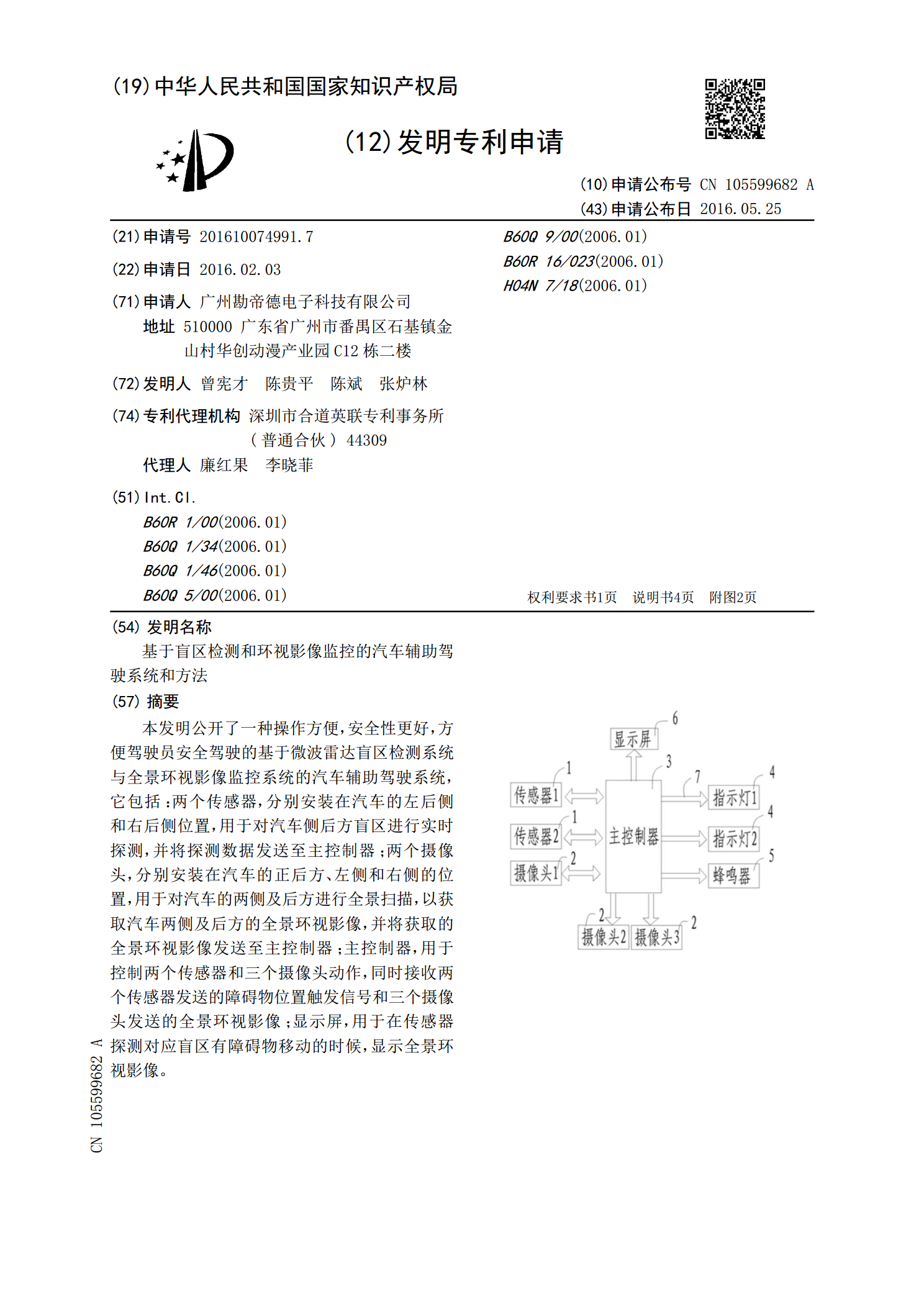
基于盲区检测和环视影像监控的汽车辅助驾驶系统和方法.pdf
本发明公开了一种操作方便,安全性更好,方便驾驶员安全驾驶的基于微波雷达盲区检测系统与全景环视影像监控系统的汽车辅助驾驶系统,它包括:两个传感器,分别安装在汽车的左后侧和右后侧位置,用于对汽车侧后方盲区进行实时探测,并将探测数据发送至主控制器;两个摄像头,分别安装在汽车的正后方、左侧和右侧的位置,用于对汽车的两侧及后方进行全景扫描,以获取汽车两侧及后方的全景环视影像,并将获取的全景环视影像发送至主控制器;主控制器,用于控制两个传感器和三个摄像头动作,同时接收两个传感器发送的障碍物位置触发信号和三个摄像头发送