
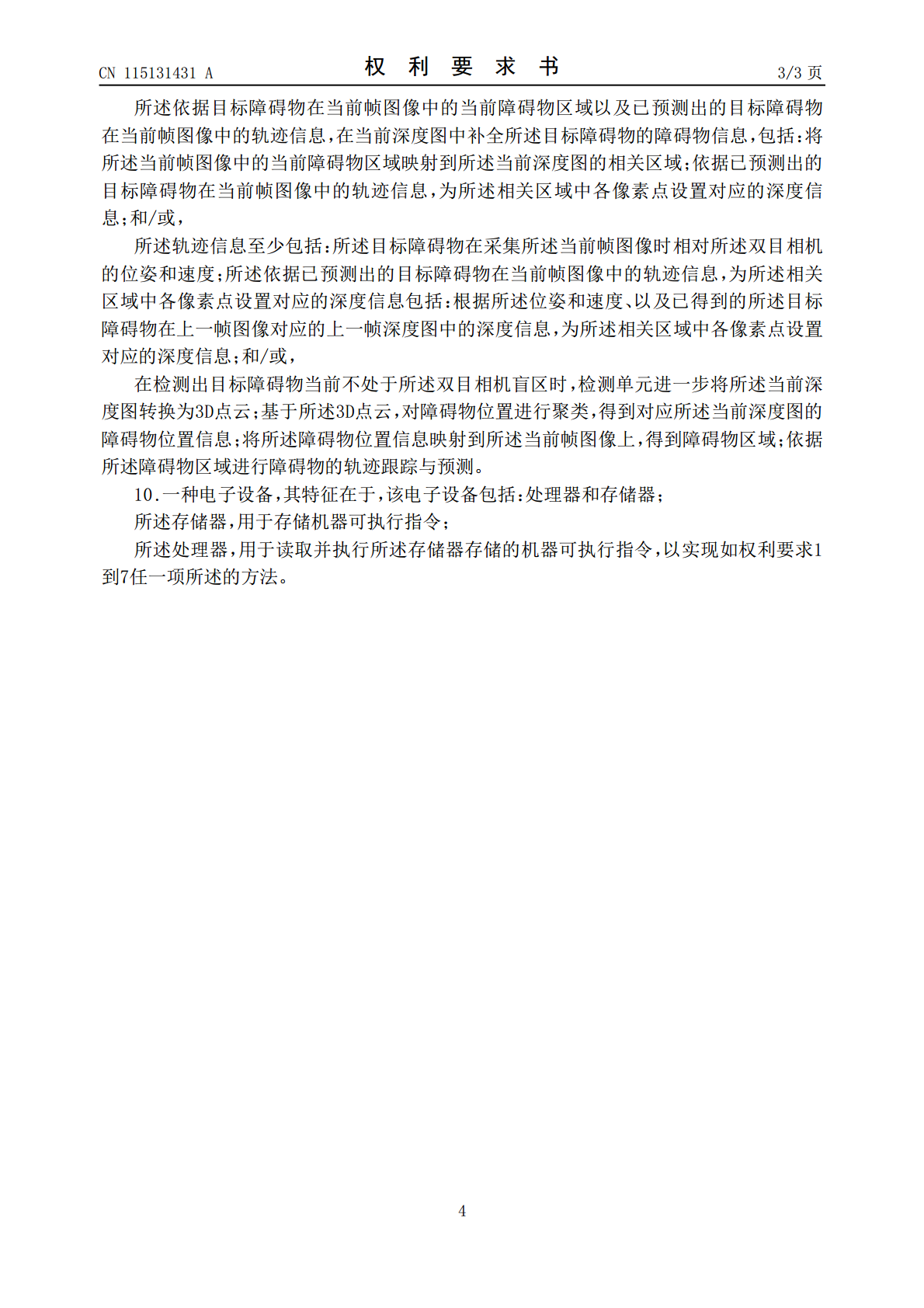
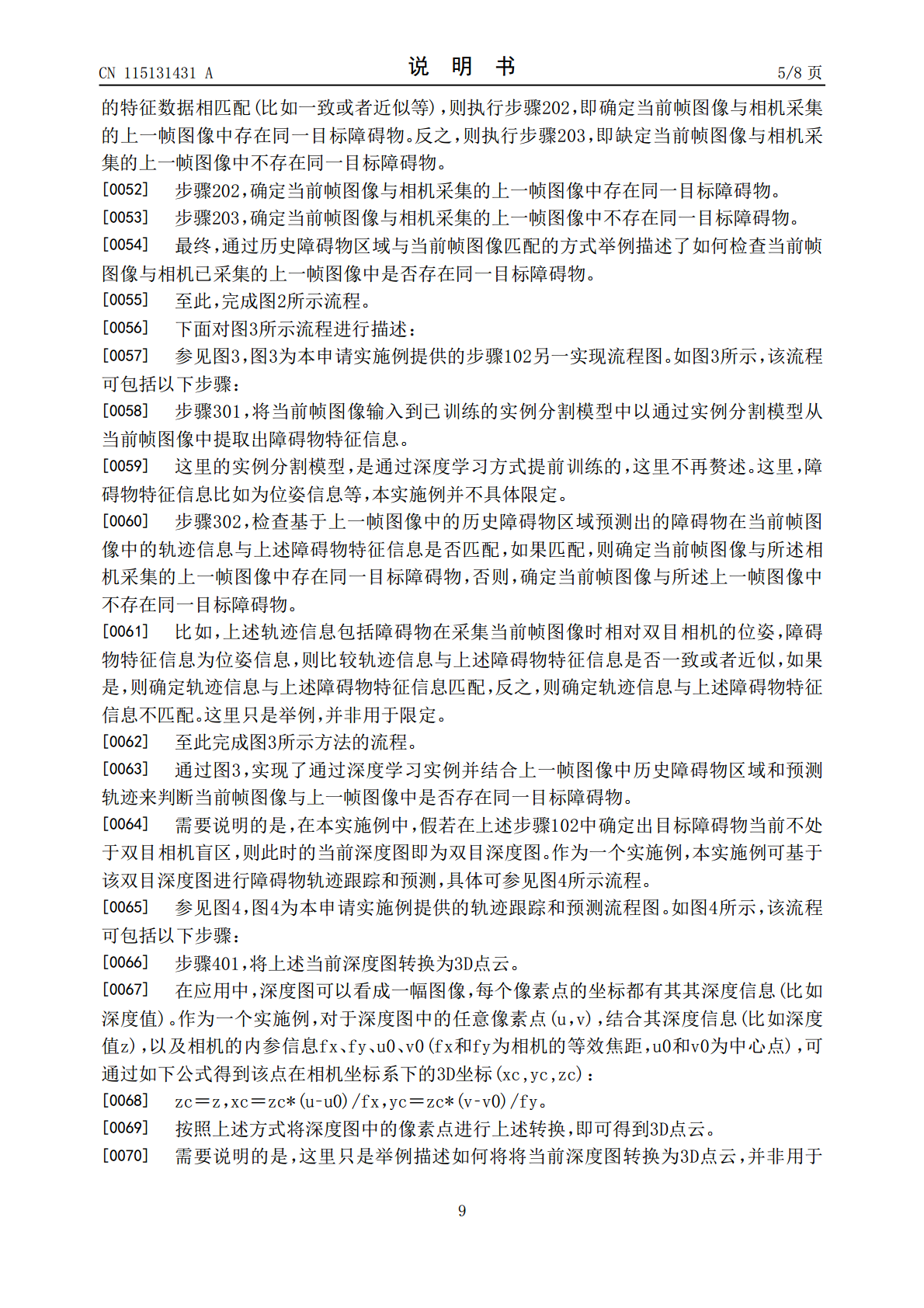
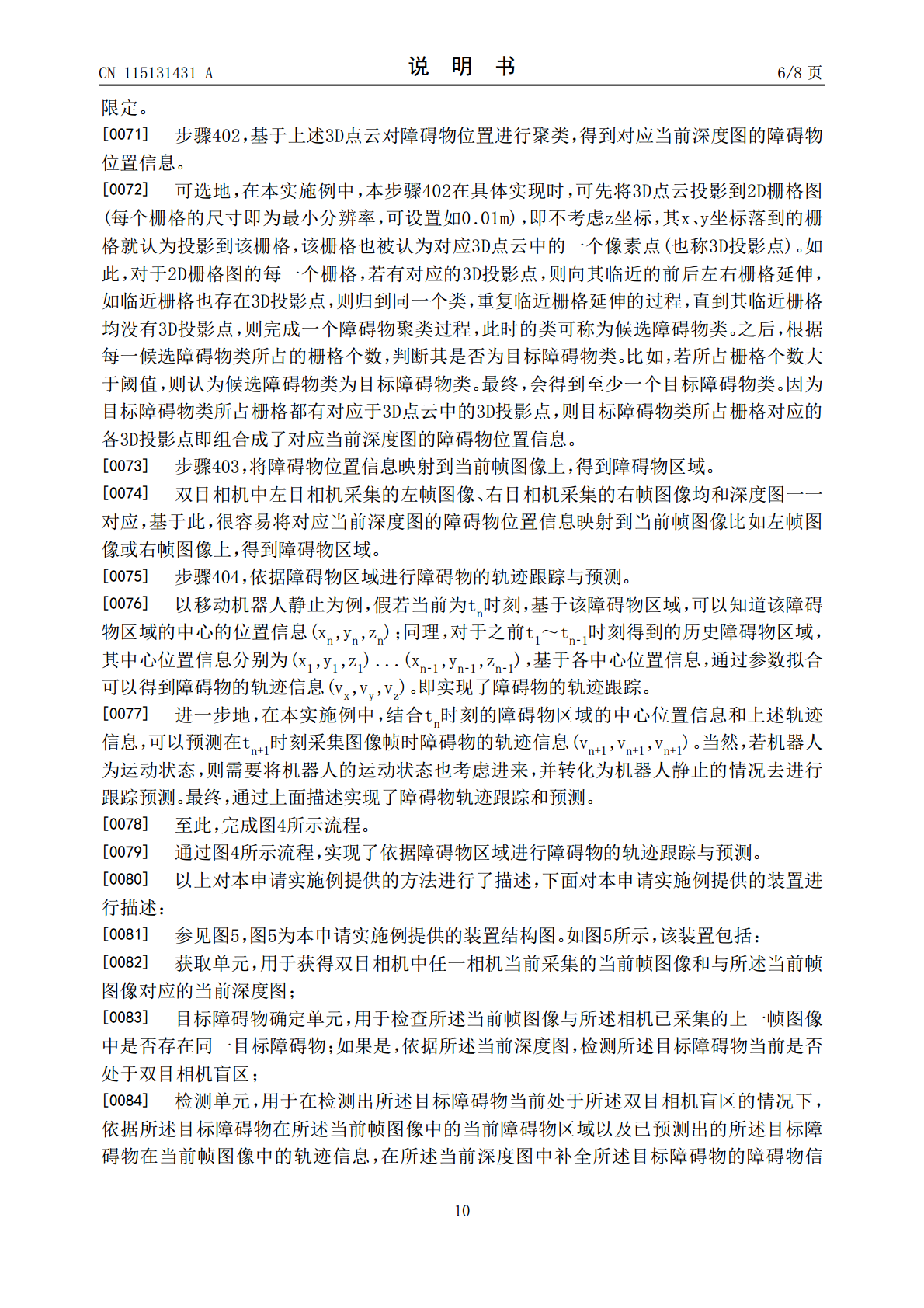
一种双目相机盲区内的障碍物检测方法、装置及设备.pdf

一条****轩吗


1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种双目相机盲区内的障碍物检测方法、装置及设备.pdf
本申请实施例公开了一种双目相机盲区内的障碍物检测方法、装置及设备。本申请实施例会自动检测双目相机盲区是否进入了目标障碍物,并在检测出双目相机盲区进入了目标障碍物的情况下,会自适应在当前深度图中补全目标障碍物的障碍物信息,以基于当前深度图中的障碍物信息进行障碍物检测,这实现了即使双目相机盲区内有目标障碍物,也能检测出该目标障碍物,避免发生碰撞的风险。

双目相机的立体标定方法、装置、系统及双目相机.pdf
本申请实施例公开了一种双目相机的立体标定方法、装置、系统及双目相机,属于计算机视觉技术领域。本方案中标定装置通过反向补光、漫反射面反射光线和热量,且保证散热,使标定板上的光线和热量均匀稳定,这样拍摄得到的可见光图像和热红外图像清晰。本方案中的立体标定方法,先将两台相机的成像规格统一,这样后续的立体标定能够准确有效。另外,在本方案中还对沿光轴方向的平移分量作减小处理,来确定两台相机各自的旋转量,后续基于确定的旋转量旋转校正图像后,能够保留更多的图像,保证了图像的可用性,也即保证了立体标定的可靠性。在将该立体

一种基于鱼眼相机的障碍物检测方法及装置.pdf
本发明涉及一种基于鱼眼相机的障碍物检测方法,该方法具体包括以下步骤:获取具有交叠视角的鱼眼图像A和鱼眼图像B,计算得到俯视图a和俯视图b,获取俯视图a与俯视图b所在相机坐标系的相对位置关系,对俯视图a进行子块划分,对俯视图a划分后的每一子块,结合俯视图b,求出h的值,判断俯视图a中的每一子块是否属于障碍物,对于所有判断为障碍物的子块进行聚类,标记,输出标记结果。本发明另外提供一种基于鱼眼相机的障碍物检测装置。本发明通过俯视图转换,解决了鱼眼相机成像形变问题,并保留了鱼眼相机的成像视角;本发明可适用于任意类

基线距离可调的双目障碍物检测方法、装置及系统.pdf
本发明实施例提供一种基线距离可调的双目障碍物检测方法、装置及系统,其中,该基线距离可调的双目障碍物检测方法包括:获取车辆的行驶速度和/或档位信息;根据所述行驶速度和/或档位信息确定双目相机之间的目标基线距离;根据所述目标基线距离调节双目相机之间的当前基线距离,并采用基线距离调节后的双目相机进行障碍物检测。本发明通过根据车速和/或档位信息动态调整双目相机之间的基线距离,实现基线距离可调的双目障碍物检测,解决了现有技术中由于双目相机之间的基线距离固定而导致的检测范围固定的问题,大大增强了用户的体验。
双目结构光相机模组的检测装置和方法.pdf
本申请提出一种双目结构光相机模组的检测装置和方法,检测装置包括:第一固定装置,包括基板支架和按照预先设定的基线安装在基板支架上的左红外相机模组、散斑投射模组和右红外相机模组,散斑投射模组位于左红外相机模组和右红外相机模组的中心位置;标准红外相机模组,以特定距离固定在散斑投射模组的竖直上方;光学处理装置,水平设置在标准红外相机模组和散斑投射模组的中线位置,用于对散斑投射模组投射的光束进行部分反射和部分透射;其中,左红外相机模组、右红外相机模组和标准红外相机模组结构相同。通过双目结构光相机模组的检测装置,能够