
一种基于双目相机的车前行人测距方法及终端.pdf

努力****梓颖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于双目相机的车前行人测距方法及终端.pdf
本发明提供一种基于双目相机的车前行人测距方法及终端,包括:对部署在车辆外侧顶端的双目相机进行标定和立体匹配,并基于双目相机预先拍摄的行人视频集训练得到行人识别模型;启动双目相机,采用行人识别模型对双目相机实时拍摄的车前图像进行行人目标识别,若识别到行人目标则提取行人目标在当前车前图像上的ROI区域,并去除遮挡物后得到ROI深度图;随机提取行人目标的多个关键节点,并在ROI深度图中获取各个关键节点的深度信息,以各个关键节点的深度信息的均值作为行人距离,并将识别到行人目标的车前图像和行人距离实时显示在车载显示

一种基于行人跟踪的实时高精度双目测距系统及方法.pdf
本发明属于测距装置技术领域,公开了一种基于行人跟踪的实时高精度双目测距系统及方法,预测单元,保存行人上一帧的目标区域,作为下一帧SGBM算法的预计算区域;SGBM计算单元,用SGBM算法计算上一帧预测的区域的视差矩阵;BM计算单元,用BM算法计算全图的视差矩阵;逻辑判断单元,对于采用SGBM还是BM的结果进行判断。并且对兴趣点列表中的所有距离值做平均。本发明通过对跟踪区域的预测,加上对BM和SGBM进行结构性的融合,只对行人部分进行深度值的计算,使得可以满足嵌入式的实时性要求,同时保留高精度的特性。对于少
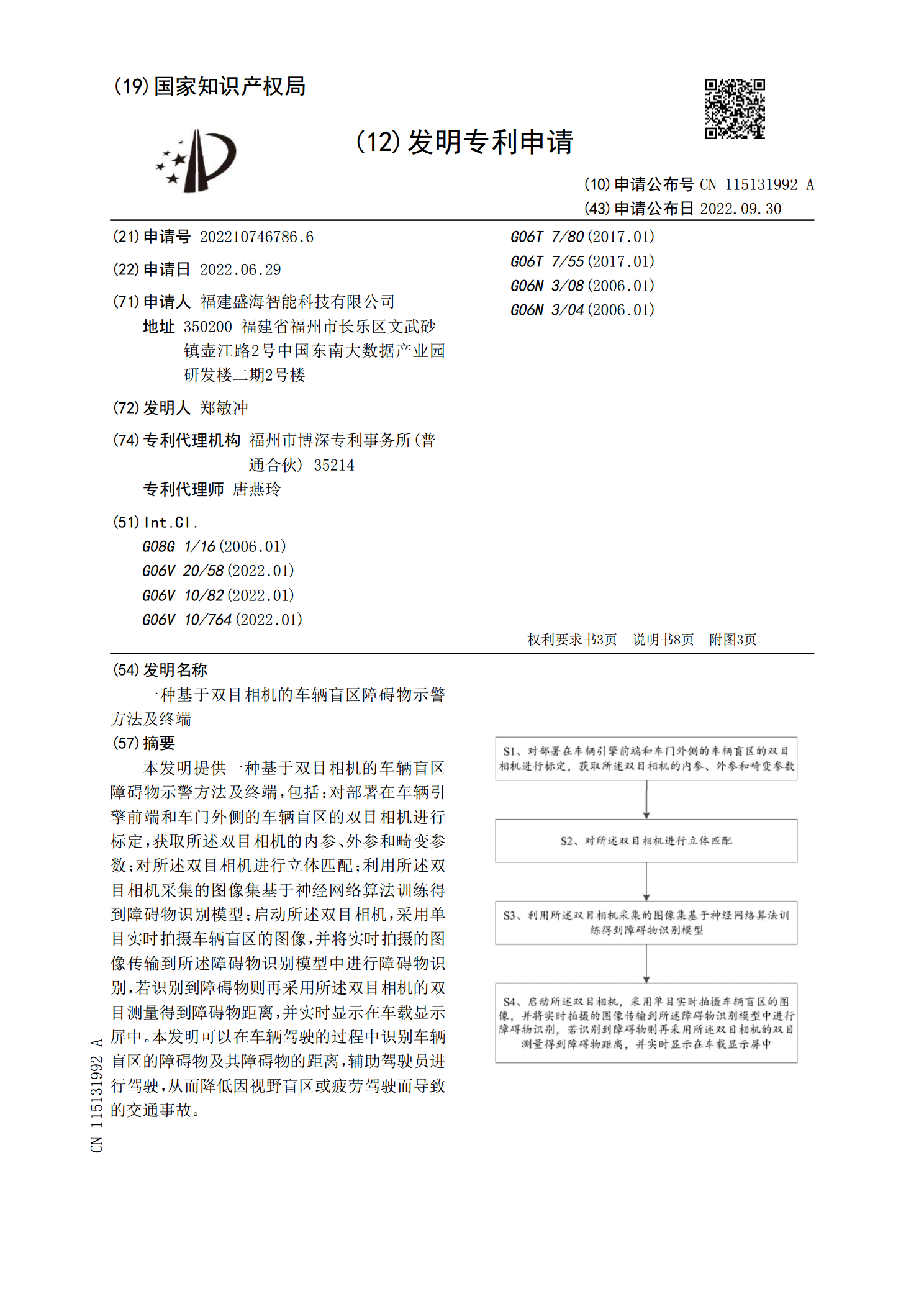
一种基于双目相机的车辆盲区障碍物示警方法及终端.pdf
本发明提供一种基于双目相机的车辆盲区障碍物示警方法及终端,包括:对部署在车辆引擎前端和车门外侧的车辆盲区的双目相机进行标定,获取所述双目相机的内参、外参和畸变参数;对所述双目相机进行立体匹配;利用所述双目相机采集的图像集基于神经网络算法训练得到障碍物识别模型;启动所述双目相机,采用单目实时拍摄车辆盲区的图像,并将实时拍摄的图像传输到所述障碍物识别模型中进行障碍物识别,若识别到障碍物则再采用所述双目相机的双目测量得到障碍物距离,并实时显示在车载显示屏中。本发明可以在车辆驾驶的过程中识别车辆盲区的障碍物及其障
一种基于双目相机的实时台阶检测方法.pdf
本发明公开了一种基于双目相机的实时台阶检测方法。通过双目相机采集的两幅图像的视差获得图像的深度信息,并结合九轴陀螺仪(重力加速度,陀螺仪,磁力计)将相机坐标系下的深度信息重建为世界坐标系下的三维点云,通过平面拟合方法分割由道路组成的点云和其它点云,再对由道路组成的点云进行平面拟合,判断道路是平坦的还是由台阶组成的。本发明能实时地检测上台阶、下台阶以及其离用户距离,可以帮助有视力障碍的人(盲人,视力低下者)上下台阶,保证其人身安全;本发明采用被动式探测,功耗低,不会干扰到他人,并且全面考虑了各种实际环境中可
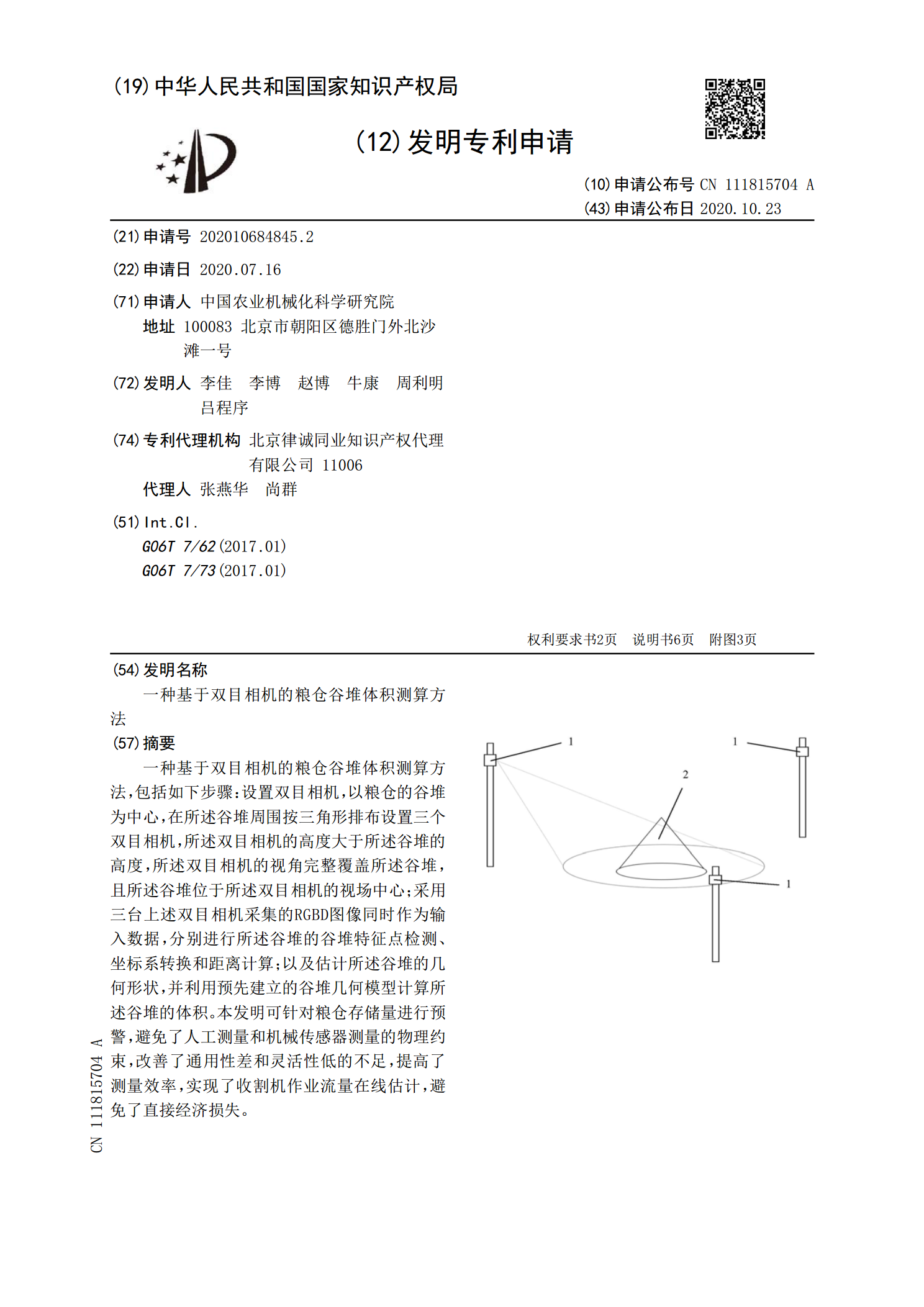
一种基于双目相机的粮仓谷堆体积测算方法.pdf
一种基于双目相机的粮仓谷堆体积测算方法,包括如下步骤:设置双目相机,以粮仓的谷堆为中心,在所述谷堆周围按三角形排布设置三个双目相机,所述双目相机的高度大于所述谷堆的高度,所述双目相机的视角完整覆盖所述谷堆,且所述谷堆位于所述双目相机的视场中心;采用三台上述双目相机采集的RGBD图像同时作为输入数据,分别进行所述谷堆的谷堆特征点检测、坐标系转换和距离计算;以及估计所述谷堆的几何形状,并利用预先建立的谷堆几何模型计算所述谷堆的体积。本发明可针对粮仓存储量进行预警,避免了人工测量和机械传感器测量的物理约束,改善