
自动驾驶车辆盲区行驶控制方法、装置、设备及存储介质.pdf

佳晨****ng

1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动驾驶车辆盲区行驶控制方法、装置、设备及存储介质.pdf
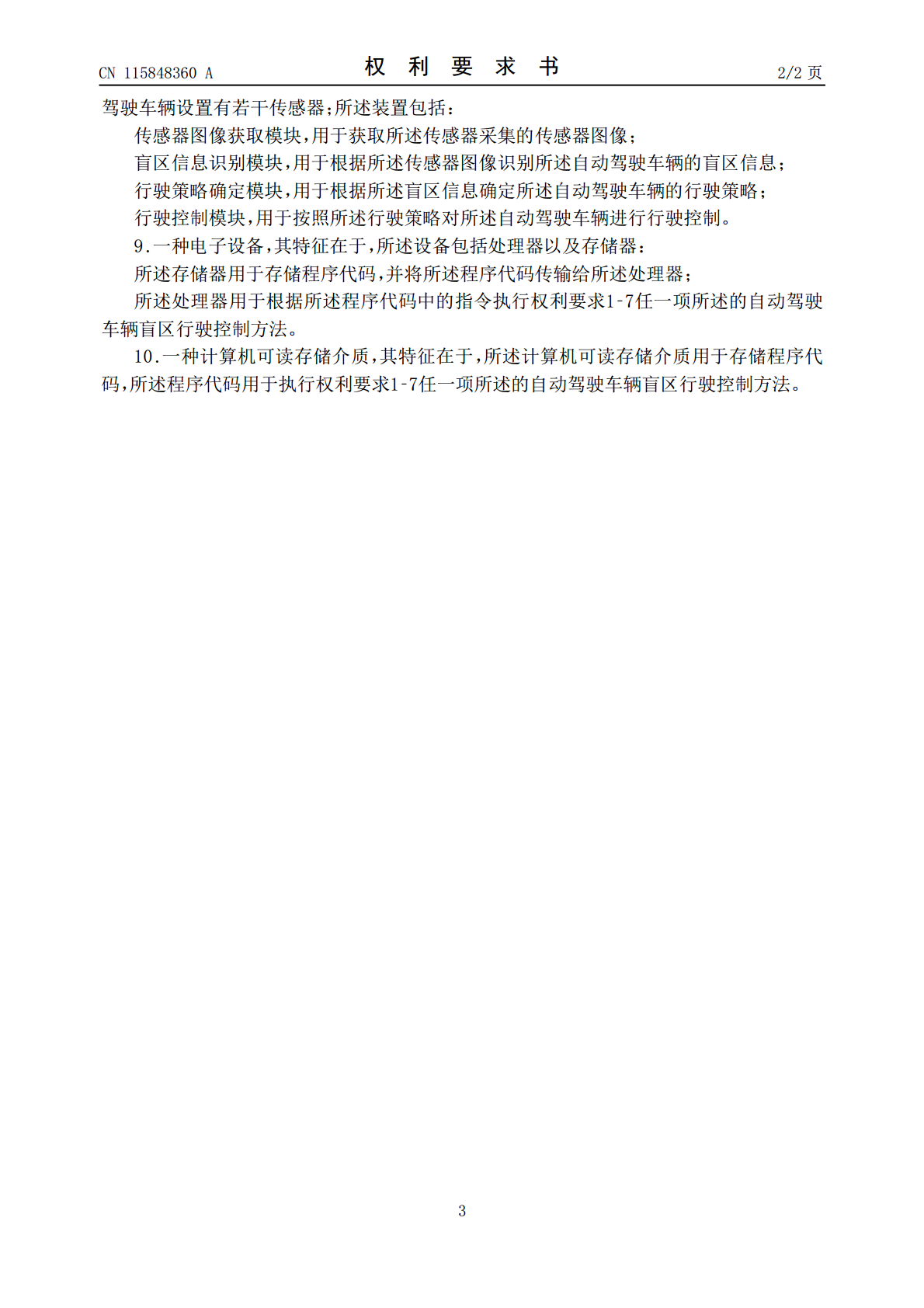
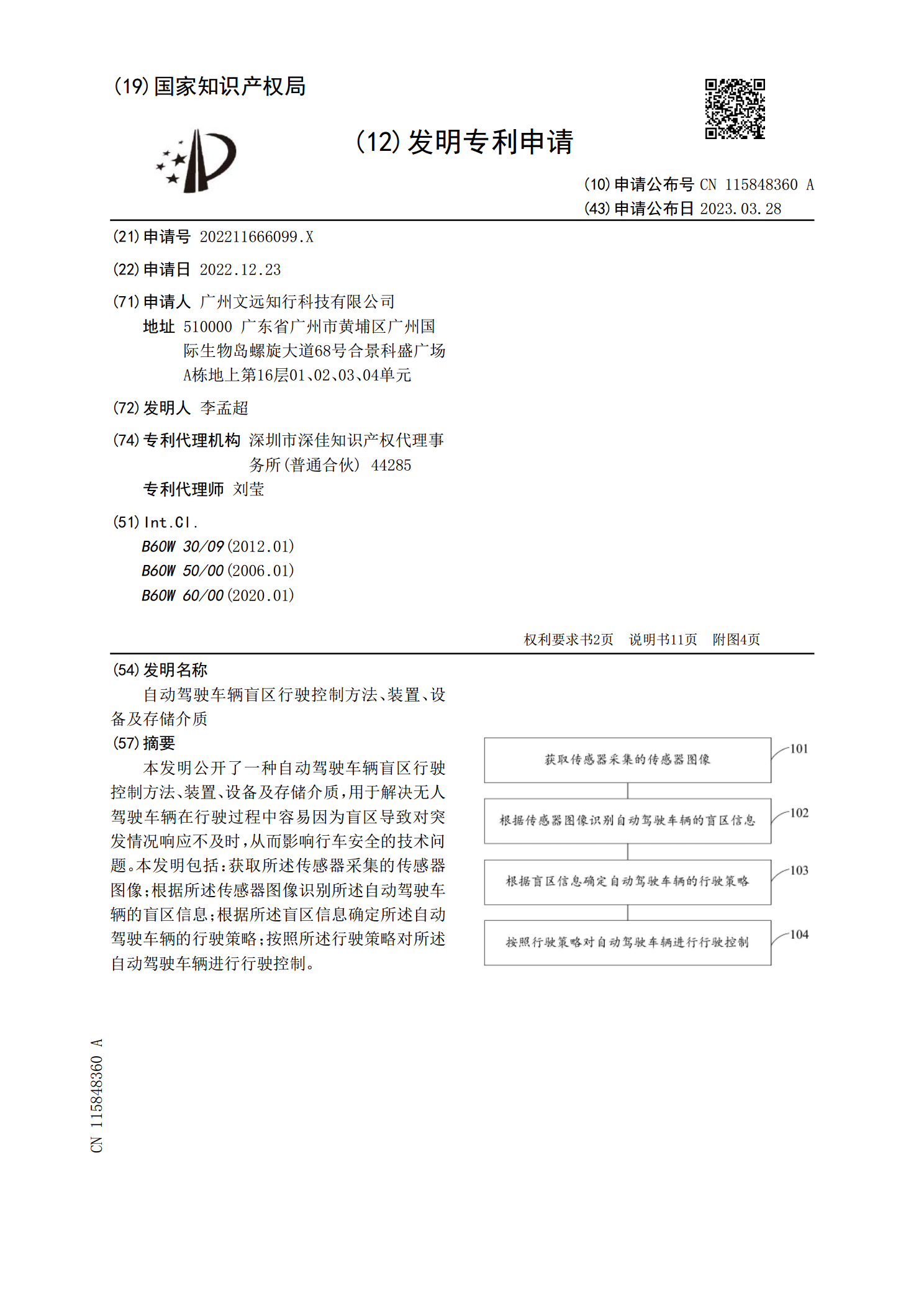
本发明公开了一种自动驾驶车辆盲区行驶控制方法、装置、设备及存储介质,用于解决无人驾驶车辆在行驶过程中容易因为盲区导致对突发情况响应不及时,从而影响行车安全的技术问题。本发明包括:获取所述传感器采集的传感器图像;根据所述传感器图像识别所述自动驾驶车辆的盲区信息;根据所述盲区信息确定所述自动驾驶车辆的行驶策略;按照所述行驶策略对所述自动驾驶车辆进行行驶控制。
车辆行驶盲区校准方法、装置、设备及存储介质.pdf
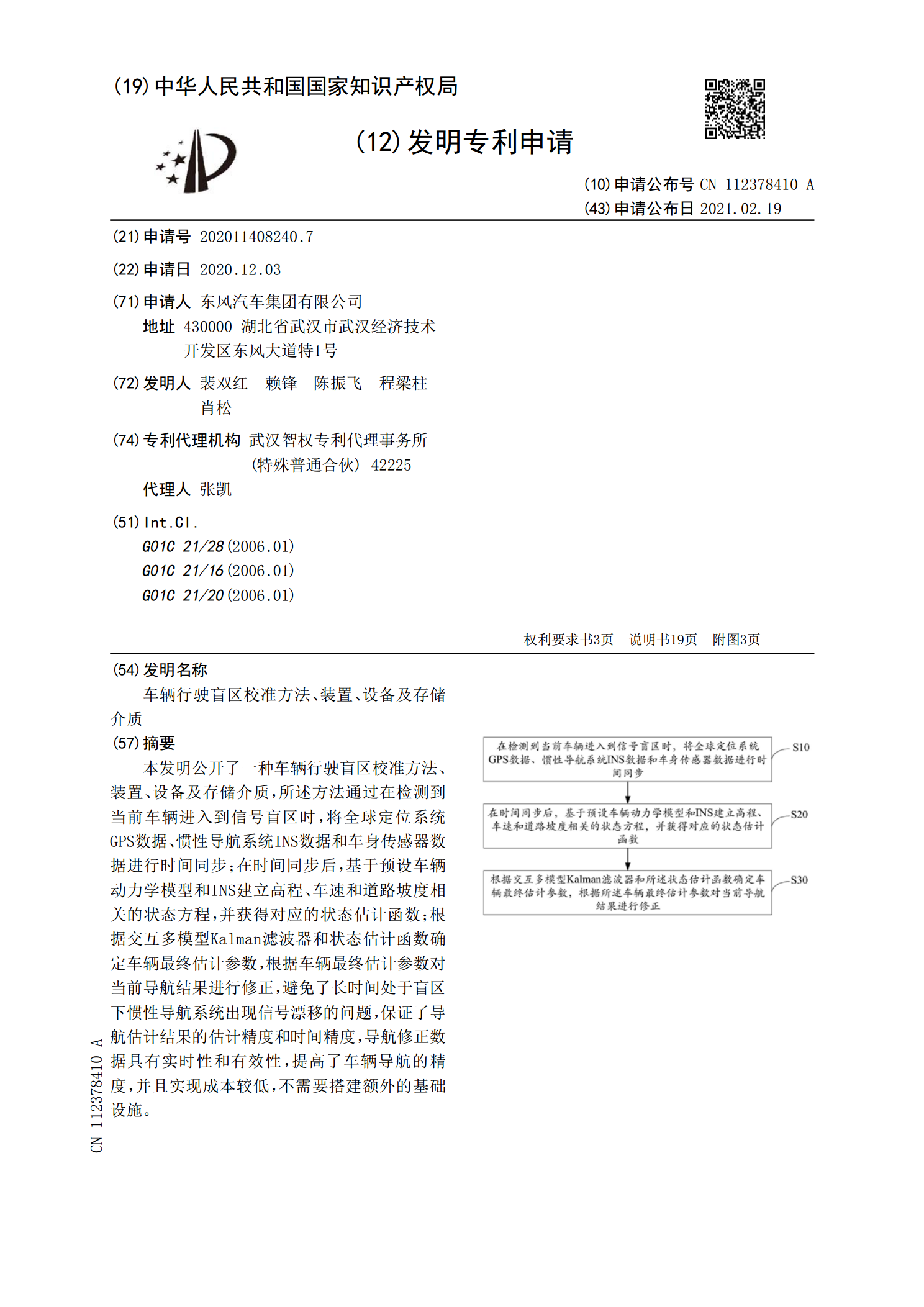
本发明公开了一种车辆行驶盲区校准方法、装置、设备及存储介质,所述方法通过在检测到当前车辆进入到信号盲区时,将全球定位系统GPS数据、惯性导航系统INS数据和车身传感器数据进行时间同步;在时间同步后,基于预设车辆动力学模型和INS建立高程、车速和道路坡度相关的状态方程,并获得对应的状态估计函数;根据交互多模型Kalman滤波器和状态估计函数确定车辆最终估计参数,根据车辆最终估计参数对当前导航结果进行修正,避免了长时间处于盲区下惯性导航系统出现信号漂移的问题,保证了导航估计结果的估计精度和时间精度,导航修正数

控制车辆行驶的方法、装置、车辆及存储介质.pdf
本申请公开一种控制车辆行驶的方法、装置、车辆及存储介质。该方法包括:获取目标路径,所述目标路径是指期望车辆行驶的路径;确定所述车辆的至少一个电机对应的目标电机扭矩,以及确定所述车辆的至少两个车轮对应的目标制动力;基于所述目标电机扭矩、所述目标制动力控制所述车辆按照所述目标路径行驶。本申请提供的技术方案,利用预先确定的电机的电机扭矩,以及多个车轮的制动力来控制车辆行驶时,会使车辆的行驶路径趋近于目标路径,实现路径跟随,此外多个车轮的制动力调节产生与转弯方向相关的横摆力矩,该横摆力矩可以进一步减小最小转弯半径
车辆控制方法、装置、设备、存储介质及自动驾驶车辆.pdf
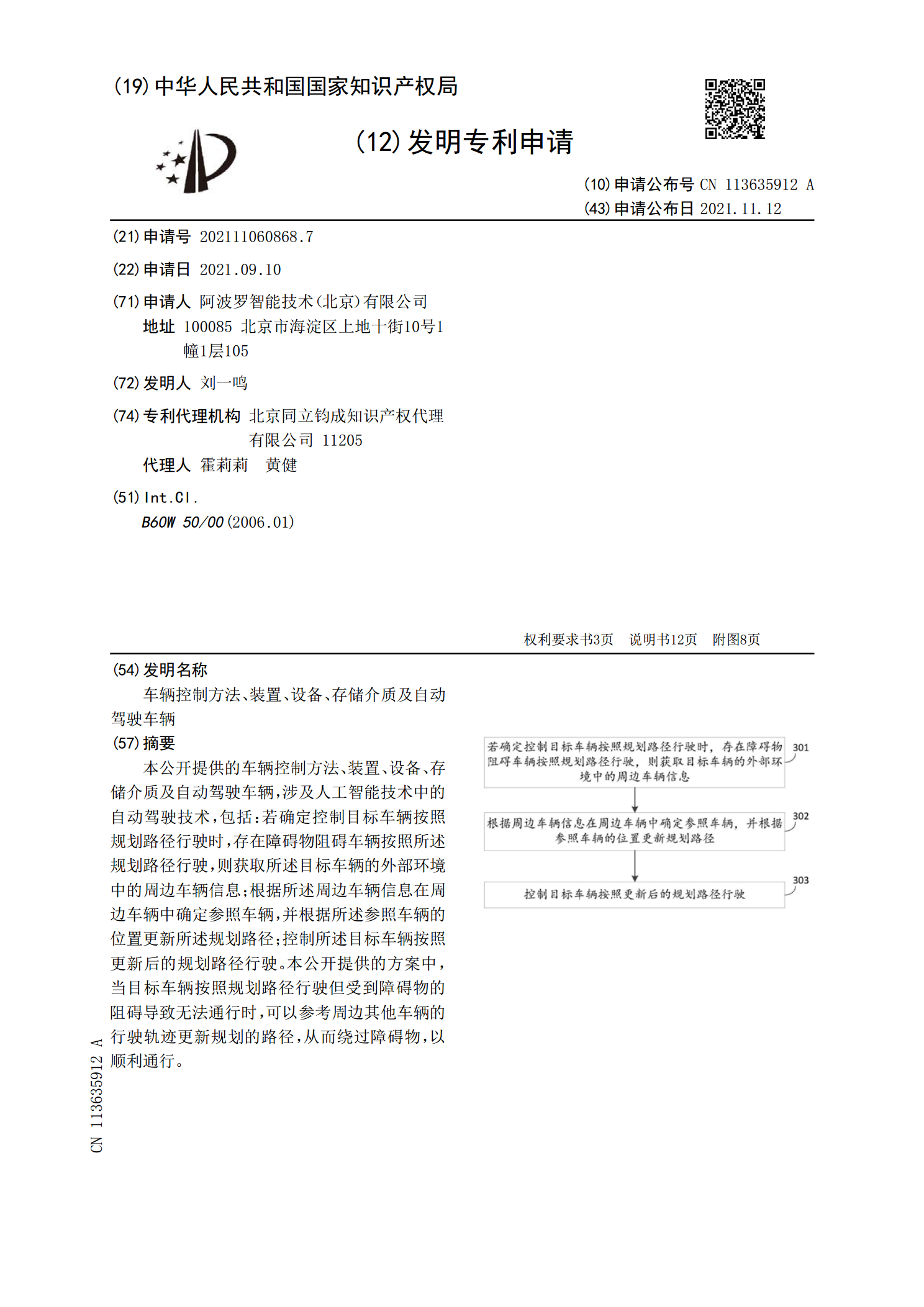
本公开提供的车辆控制方法、装置、设备、存储介质及自动驾驶车辆,涉及人工智能技术中的自动驾驶技术,包括:若确定控制目标车辆按照规划路径行驶时,存在障碍物阻碍车辆按照所述规划路径行驶,则获取所述目标车辆的外部环境中的周边车辆信息;根据所述周边车辆信息在周边车辆中确定参照车辆,并根据所述参照车辆的位置更新所述规划路径;控制所述目标车辆按照更新后的规划路径行驶。本公开提供的方案中,当目标车辆按照规划路径行驶但受到障碍物的阻碍导致无法通行时,可以参考周边其他车辆的行驶轨迹更新规划的路径,从而绕过障碍物,以顺利通行。
车辆行驶盲区监测方法、装置、计算机设备及存储介质.pdf
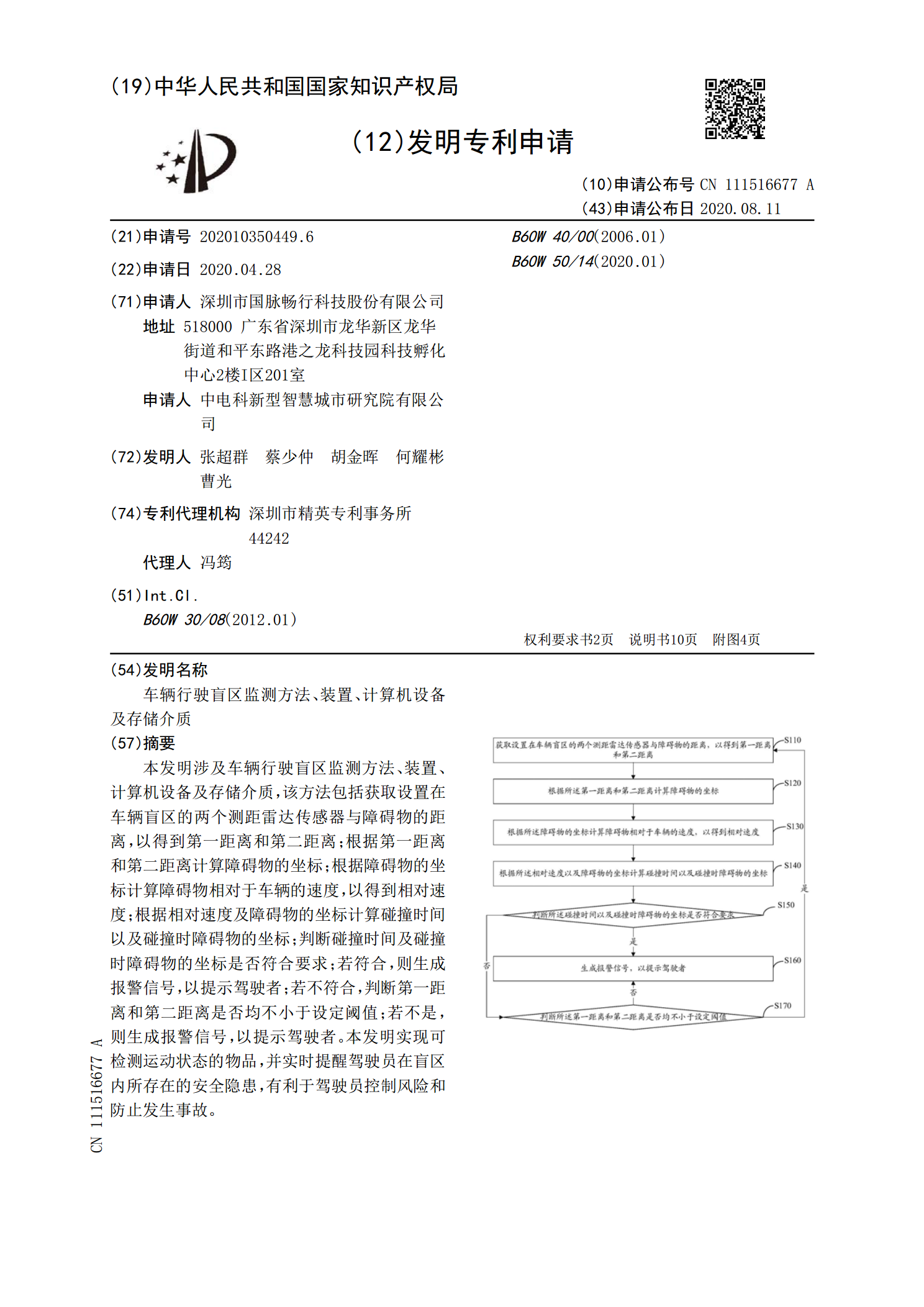
本发明涉及车辆行驶盲区监测方法、装置、计算机设备及存储介质,该方法包括获取设置在车辆盲区的两个测距雷达传感器与障碍物的距离,以得到第一距离和第二距离;根据第一距离和第二距离计算障碍物的坐标;根据障碍物的坐标计算障碍物相对于车辆的速度,以得到相对速度;根据相对速度及障碍物的坐标计算碰撞时间以及碰撞时障碍物的坐标;判断碰撞时间及碰撞时障碍物的坐标是否符合要求;若符合,则生成报警信号,以提示驾驶者;若不符合,判断第一距离和第二距离是否均不小于设定阈值;若不是,则生成报警信号,以提示驾驶者。本发明实现可检测运动状