
涂覆机器人.pdf

是飞****文章

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
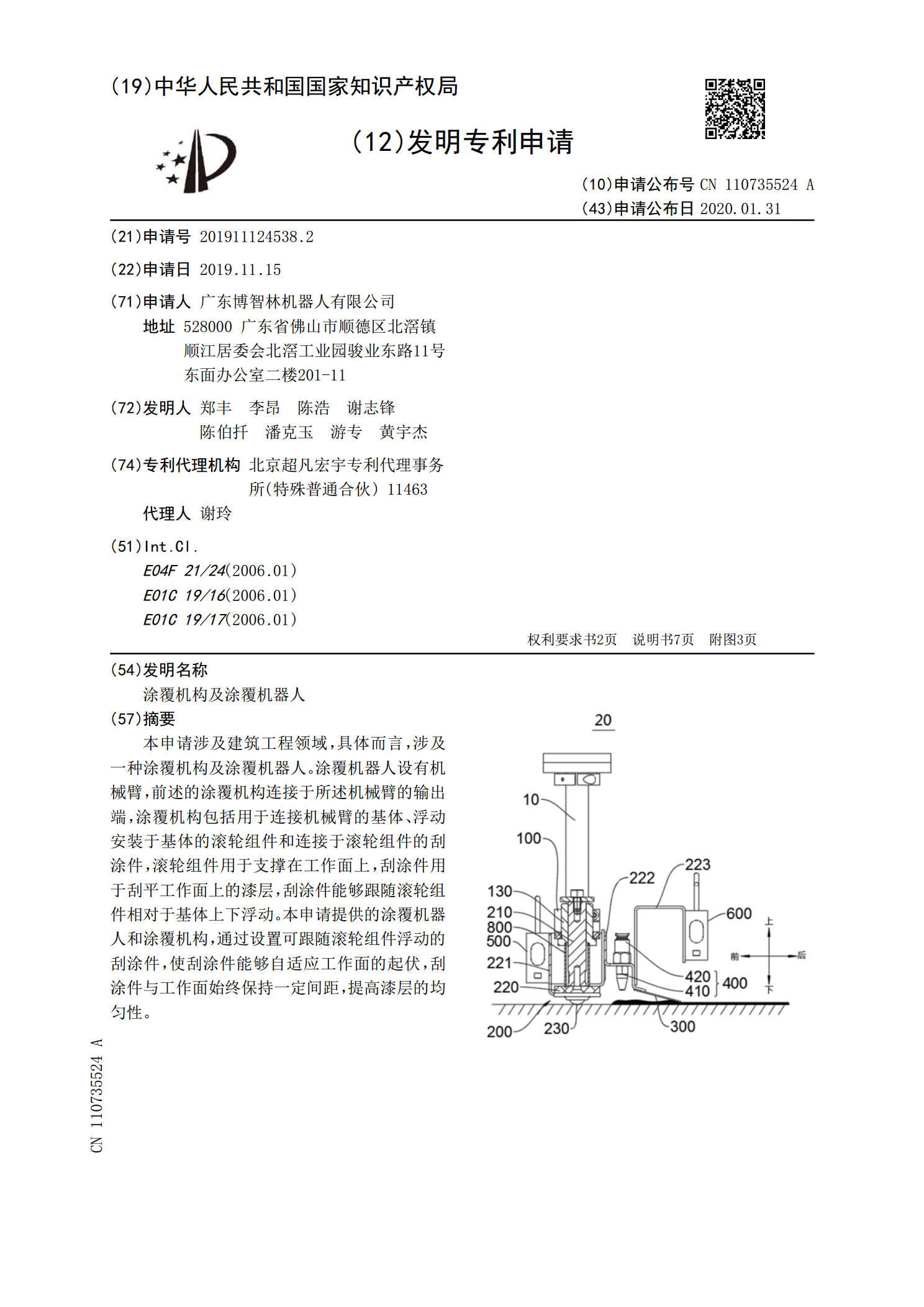
涂覆机构及涂覆机器人.pdf
本申请涉及建筑工程领域,具体而言,涉及一种涂覆机构及涂覆机器人。涂覆机器人设有机械臂,前述的涂覆机构连接于所述机械臂的输出端,涂覆机构包括用于连接机械臂的基体、浮动安装于基体的滚轮组件和连接于滚轮组件的刮涂件,滚轮组件用于支撑在工作面上,刮涂件用于刮平工作面上的漆层,刮涂件能够跟随滚轮组件相对于基体上下浮动。本申请提供的涂覆机器人和涂覆机构,通过设置可跟随滚轮组件浮动的刮涂件,使刮涂件能够自适应工作面的起伏,刮涂件与工作面始终保持一定间距,提高漆层的均匀性。

涂覆机器人.pdf
本发明涉及一种用于涂覆部件的涂覆机器人(1),所述涂覆机器人具有机器人基座(2);可旋转的机器人构件(4);可枢转的近端机器人臂(5),其具有两个能够相对于彼此旋转并且通过轴承环(6)彼此连接的臂部件(5.1、5.2);可枢转的远端机器人臂(7);机器人手轴(8);位于机器人手轴(8)的自由端处的连接法兰(9);以及从机器人基座(2)被引导到用于施涂装置的连接法兰(9)的管线结构(10)。本发明提出,管线结构(10)穿过位于近端机器人臂(5)的两个臂部件(5.1、5.2)之间的第一轴承环(6)。

用于涂覆机器人的优化方法及相应涂覆系统.pdf
本发明涉及一种计算涂覆机器人(1)的优化的移动路径的优化方法,所述优化方法包括以下步骤:使用路径点数据定义移动路径的相继的路径点,其中路径点数据定义施涂装置(7)在各个路径点处的空间位置和取向;针对移动路径的各个路径点计算可行的机器人配置,其中每个机器人配置都包括所有机器人轴(A1‑A7)的所有轴位置,至少一些路径点能够可选择地经由多个不同的机器人配置到达;分别对于各个路径点的不同的可行机器人配置计算与路径点相关的以及优选地与序列相关的品质值,使得每个机器人配置都分配有相应的品质值;以及针对各个路径点根据
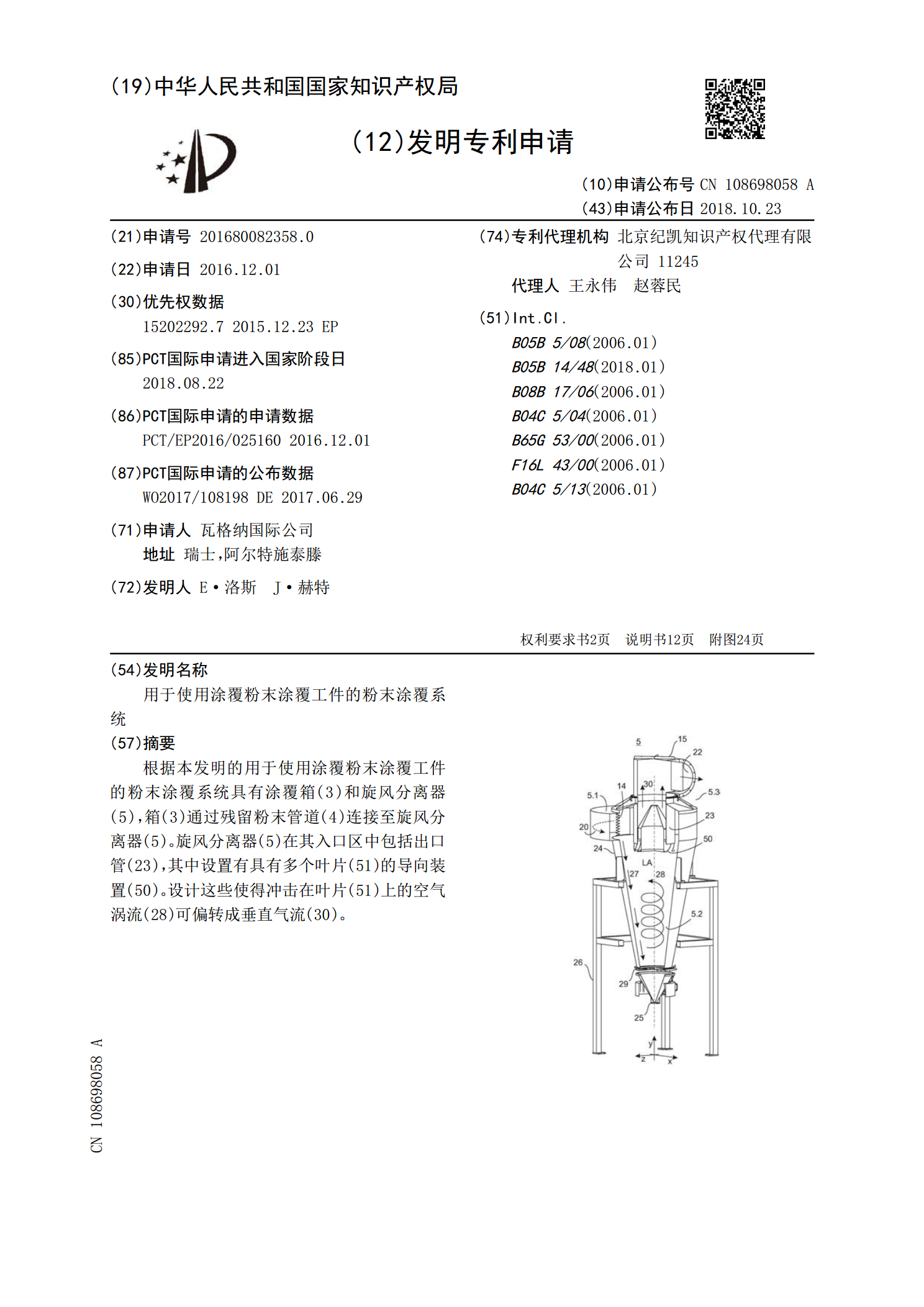
用于使用涂覆粉末涂覆工件的粉末涂覆系统.pdf
根据本发明的用于使用涂覆粉末涂覆工件的粉末涂覆系统具有涂覆箱(3)和旋风分离器(5),箱(3)通过残留粉末管道(4)连接至旋风分离器(5)。旋风分离器(5)在其入口区中包括出口管(23),其中设置有具有多个叶片(51)的导向装置(50)。设计这些使得冲击在叶片(51)上的空气涡流(28)可偏转成垂直气流(30)。
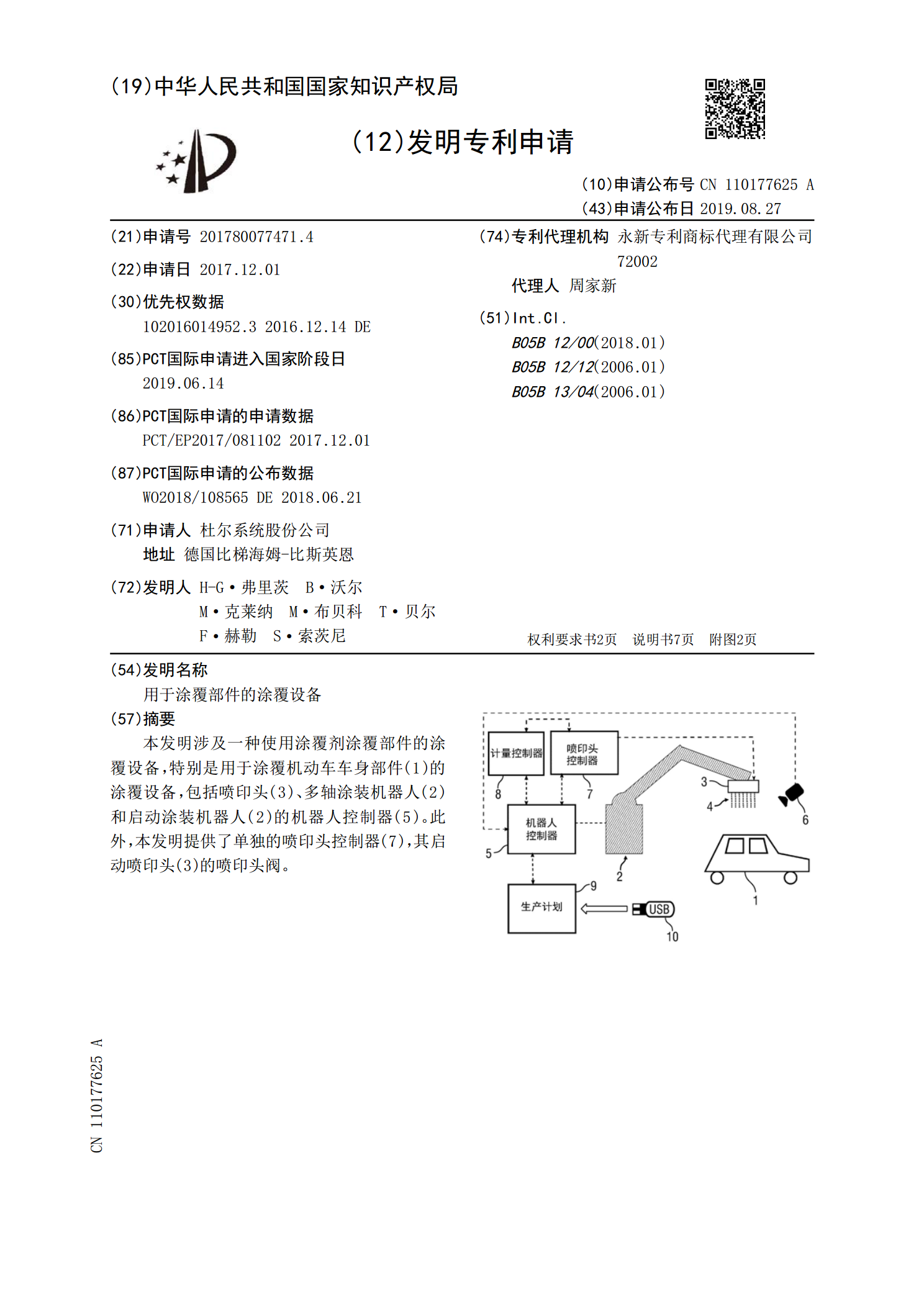
用于涂覆部件的涂覆设备.pdf
本发明涉及一种使用涂覆剂涂覆部件的涂覆设备,特别是用于涂覆机动车车身部件(1)的涂覆设备,包括喷印头(3)、多轴涂装机器人(2)和启动涂装机器人(2)的机器人控制器(5)。此外,本发明提供了单独的喷印头控制器(7),其启动喷印头(3)的喷印头阀。