
一种基于定速巡航系统的大坡道恒定车速控制方法.pdf

fu****级甜

1/7
2/7
3/7
4/7
5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于定速巡航系统的大坡道恒定车速控制方法.pdf
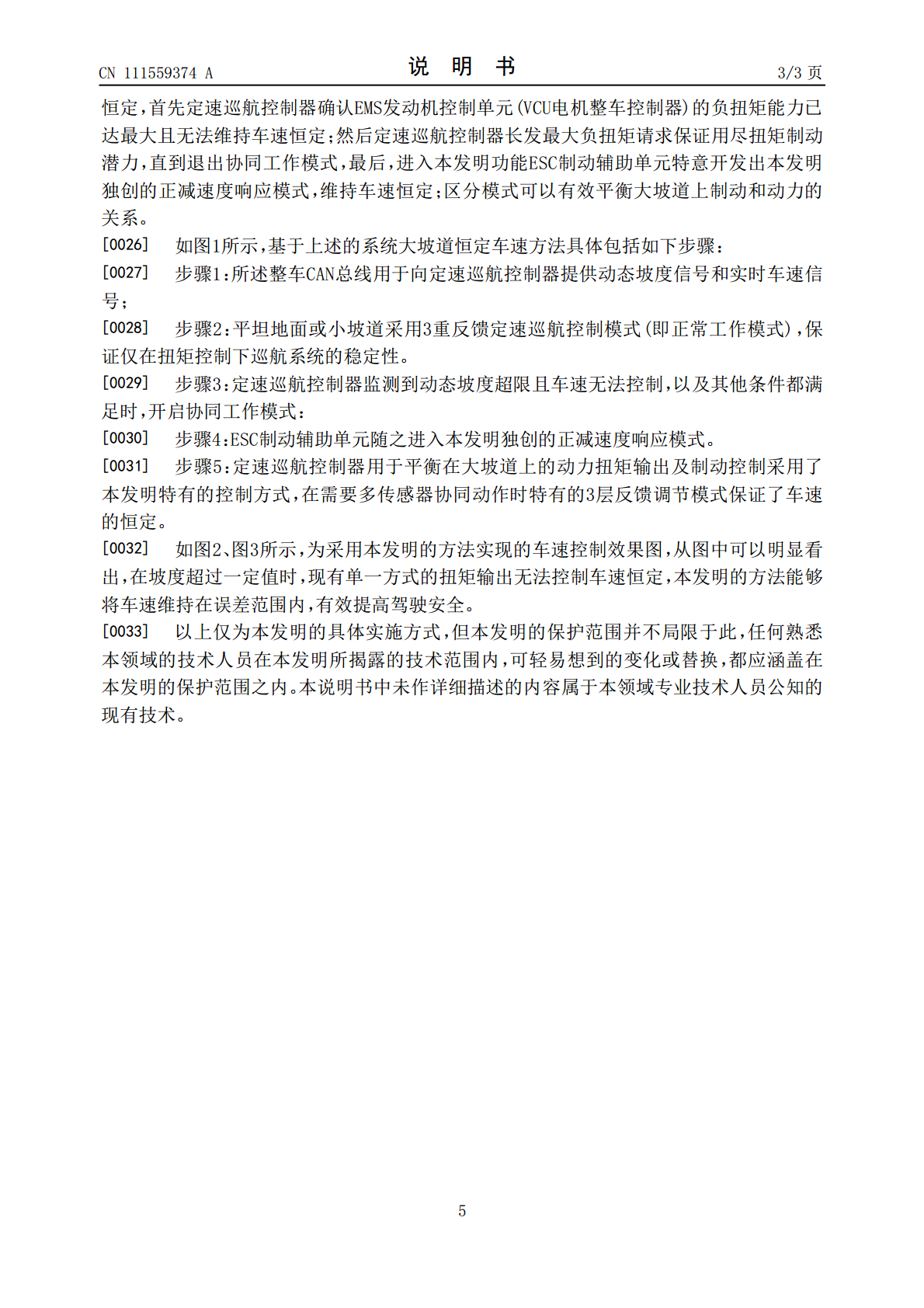
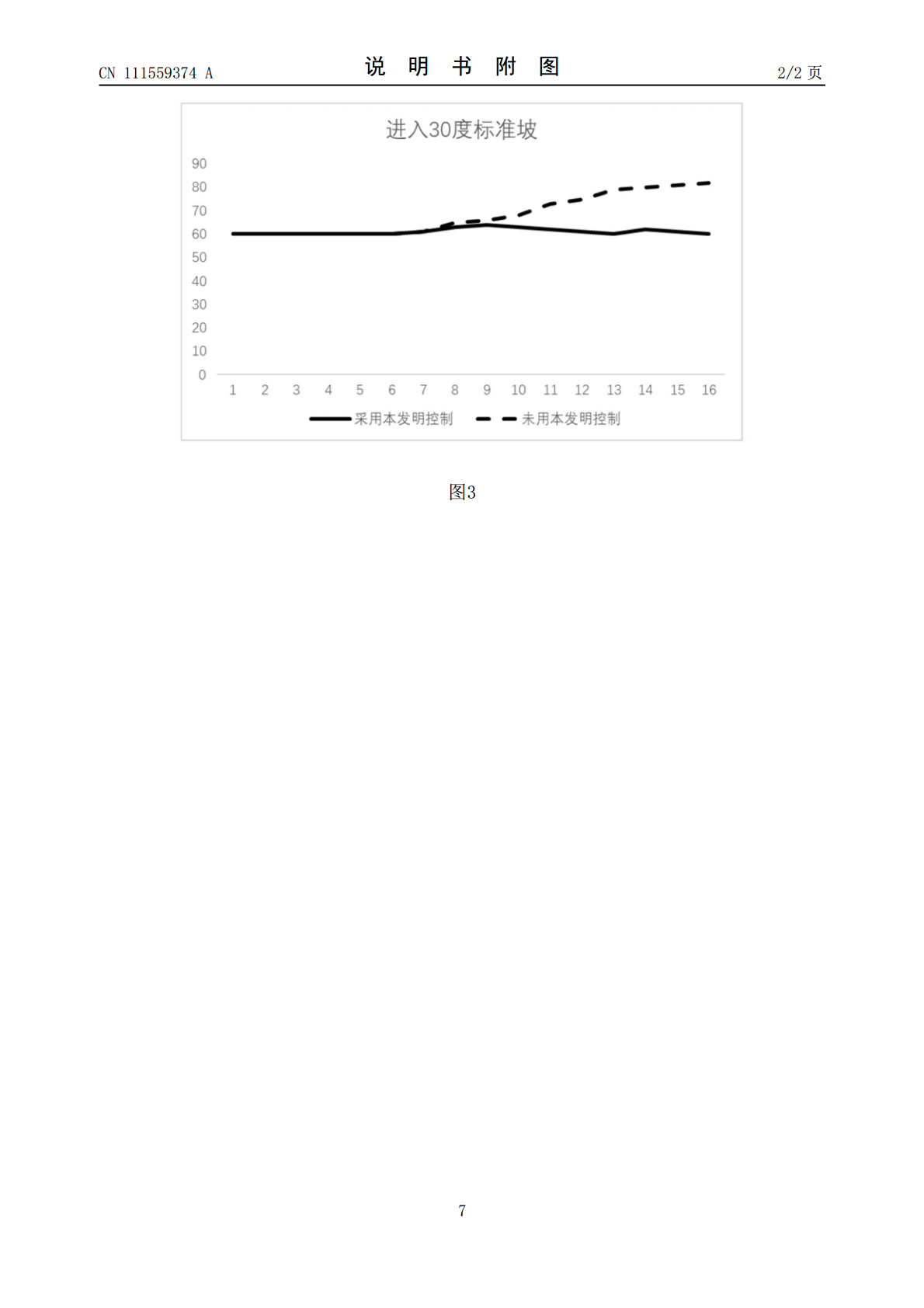
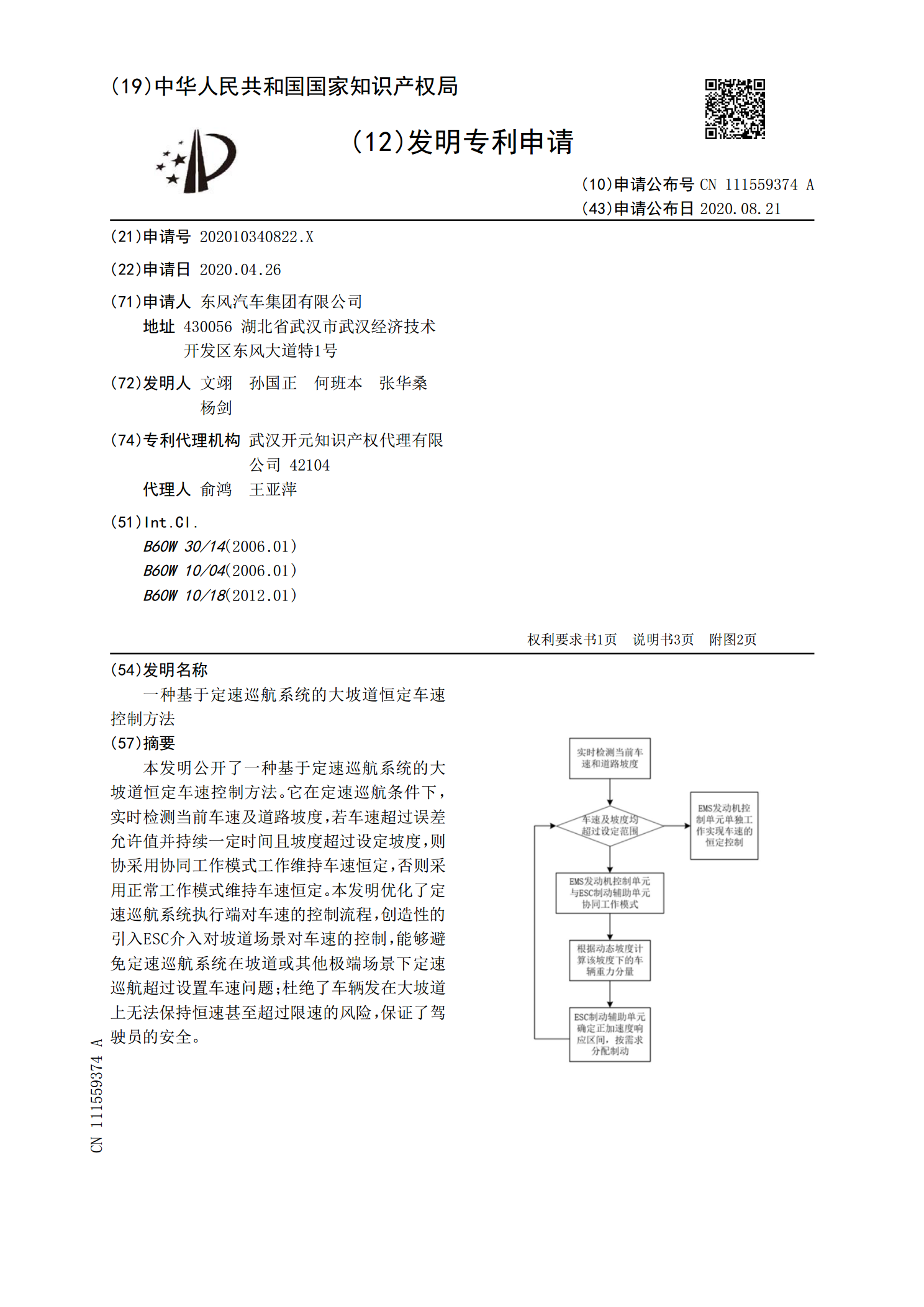
本发明公开了一种基于定速巡航系统的大坡道恒定车速控制方法。它在定速巡航条件下,实时检测当前车速及道路坡度,若车速超过误差允许值并持续一定时间且坡度超过设定坡度,则协采用协同工作模式工作维持车速恒定,否则采用正常工作模式维持车速恒定。本发明优化了定速巡航系统执行端对车速的控制流程,创造性的引入ESC介入对坡道场景对车速的控制,能够避免定速巡航系统在坡道或其他极端场景下定速巡航超过设置车速问题;杜绝了车辆发在大坡道上无法保持恒速甚至超过限速的风险,保证了驾驶员的安全。
定速巡航控制方法及系统.pdf
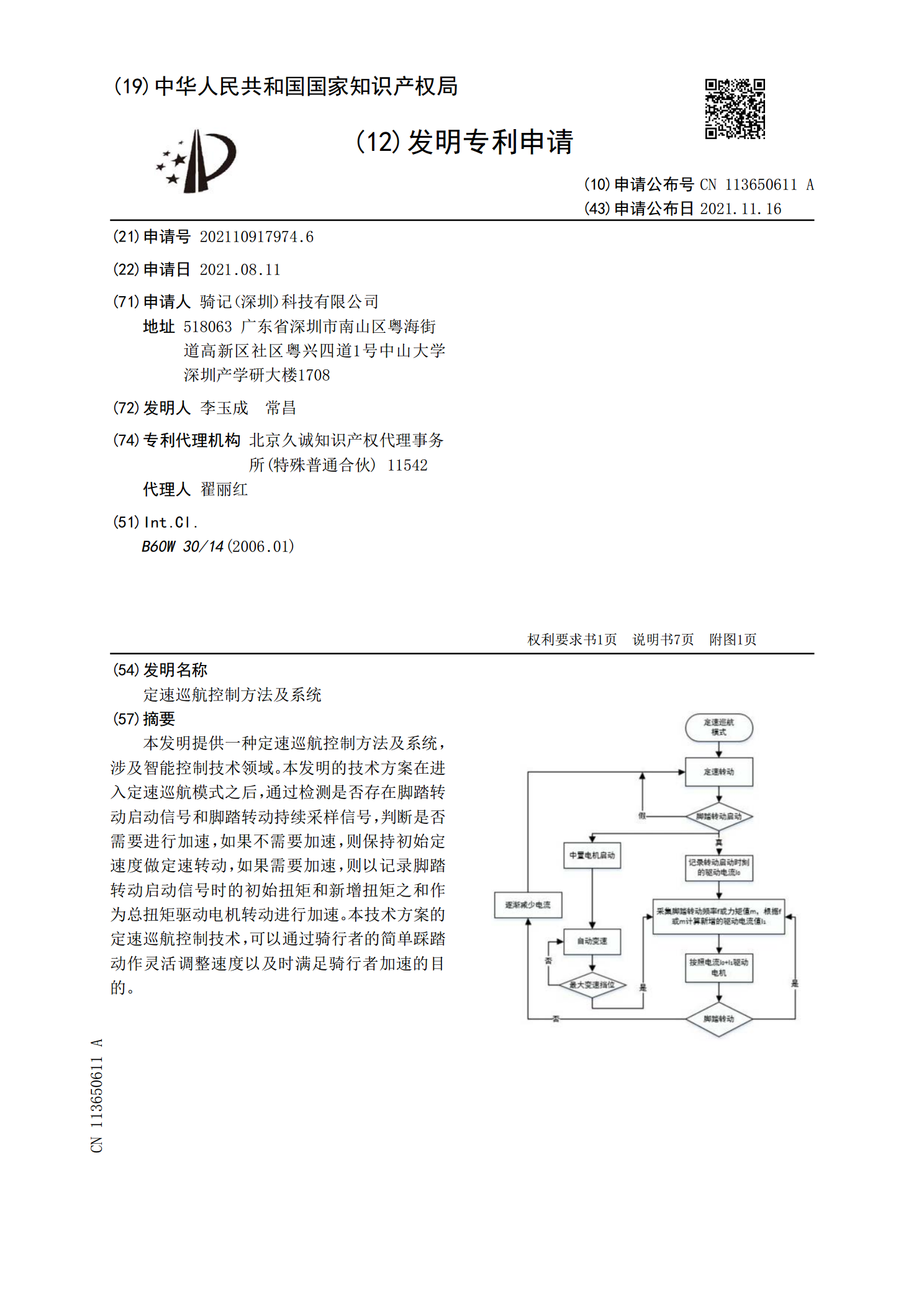
本发明提供一种定速巡航控制方法及系统,涉及智能控制技术领域。本发明的技术方案在进入定速巡航模式之后,通过检测是否存在脚踏转动启动信号和脚踏转动持续采样信号,判断是否需要进行加速,如果不需要加速,则保持初始定速度做定速转动,如果需要加速,则以记录脚踏转动启动信号时的初始扭矩和新增扭矩之和作为总扭矩驱动电机转动进行加速。本技术方案的定速巡航控制技术,可以通过骑行者的简单踩踏动作灵活调整速度以及时满足骑行者加速的目的。
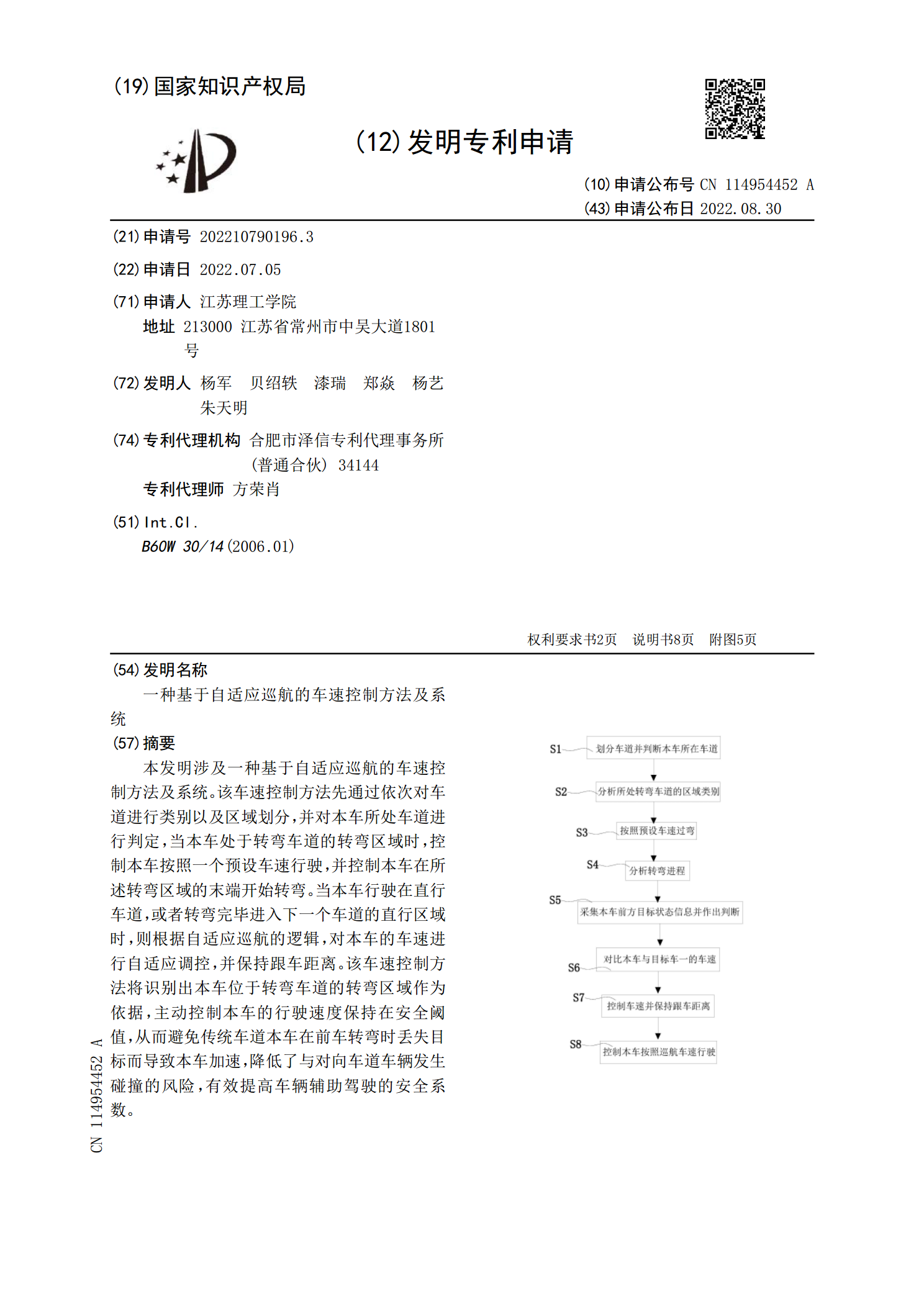
一种基于自适应巡航的车速控制方法及系统.pdf
本发明涉及一种基于自适应巡航的车速控制方法及系统。该车速控制方法先通过依次对车道进行类别以及区域划分,并对本车所处车道进行判定,当本车处于转弯车道的转弯区域时,控制本车按照一个预设车速行驶,并控制本车在所述转弯区域的末端开始转弯。当本车行驶在直行车道,或者转弯完毕进入下一个车道的直行区域时,则根据自适应巡航的逻辑,对本车的车速进行自适应调控,并保持跟车距离。该车速控制方法将识别出本车位于转弯车道的转弯区域作为依据,主动控制本车的行驶速度保持在安全阈值,从而避免传统车道本车在前车转弯时丢失目标而导致本车加速
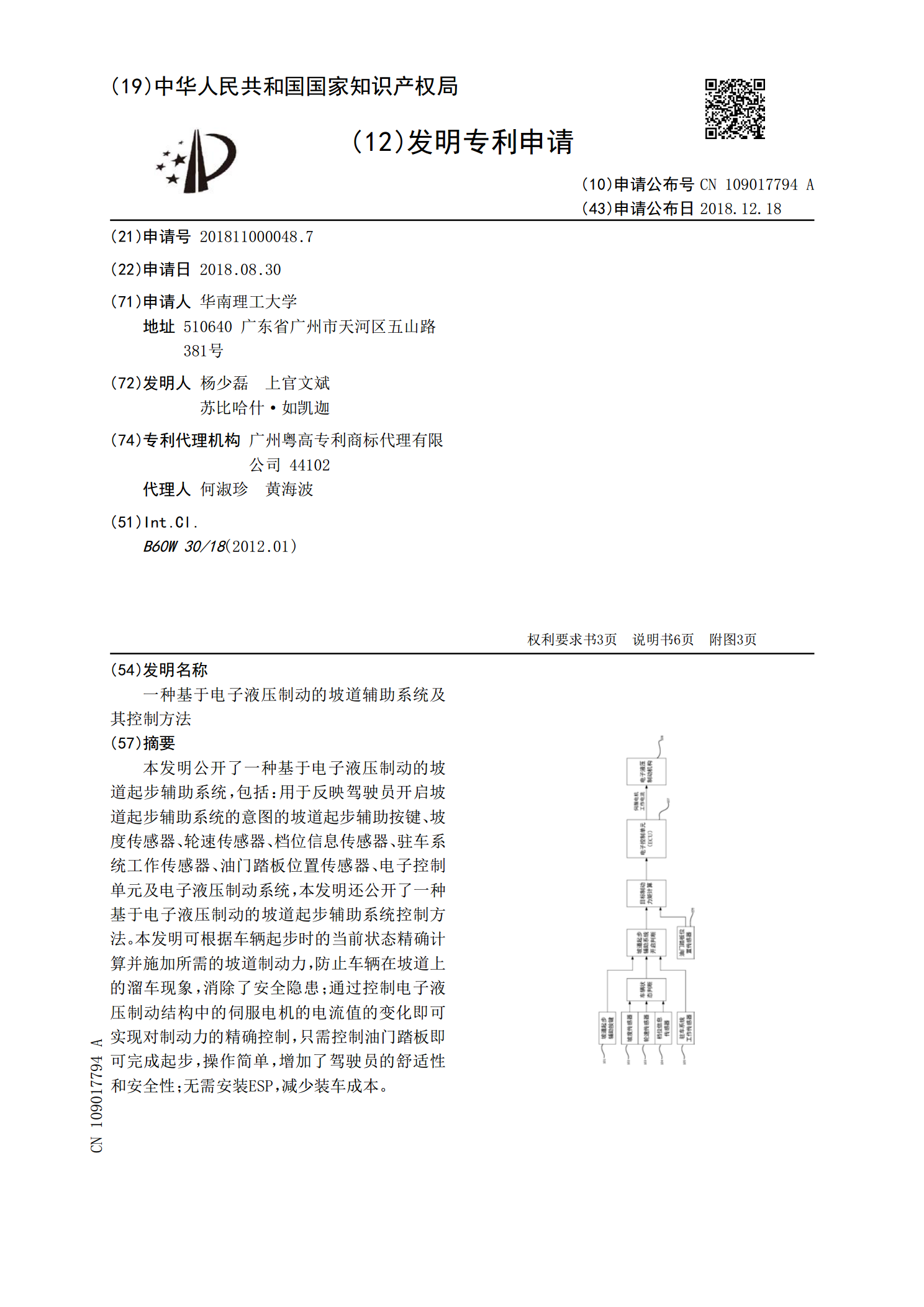
一种基于电子液压制动的坡道辅助系统及其控制方法.pdf
本发明公开了一种基于电子液压制动的坡道起步辅助系统,包括:用于反映驾驶员开启坡道起步辅助系统的意图的坡道起步辅助按键、坡度传感器、轮速传感器、档位信息传感器、驻车系统工作传感器、油门踏板位置传感器、电子控制单元及电子液压制动系统,本发明还公开了一种基于电子液压制动的坡道起步辅助系统控制方法。本发明可根据车辆起步时的当前状态精确计算并施加所需的坡道制动力,防止车辆在坡道上的溜车现象,消除了安全隐患;通过控制电子液压制动结构中的伺服电机的电流值的变化即可实现对制动力的精确控制,只需控制油门踏板即可完成起步,操
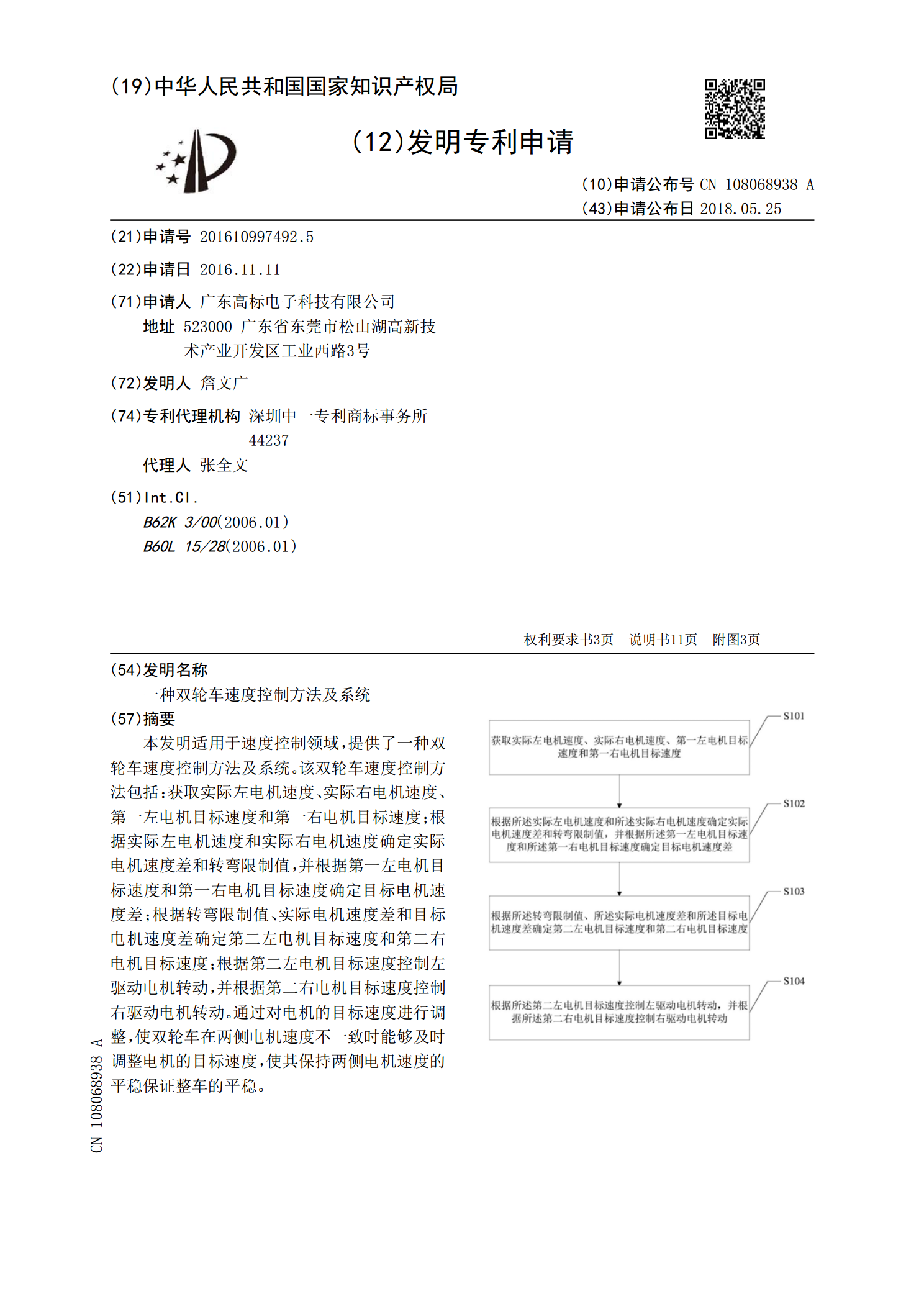
一种双轮车速度控制方法及系统.pdf
本发明适用于速度控制领域,提供了一种双轮车速度控制方法及系统。该双轮车速度控制方法包括:获取实际左电机速度、实际右电机速度、第一左电机目标速度和第一右电机目标速度;根据实际左电机速度和实际右电机速度确定实际电机速度差和转弯限制值,并根据第一左电机目标速度和第一右电机目标速度确定目标电机速度差;根据转弯限制值、实际电机速度差和目标电机速度差确定第二左电机目标速度和第二右电机目标速度;根据第二左电机目标速度控制左驱动电机转动,并根据第二右电机目标速度控制右驱动电机转动。通过对电机的目标速度进行调整,使双轮车在