
定速巡航控制方法及系统.pdf

书生****aa

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
定速巡航控制方法及系统.pdf
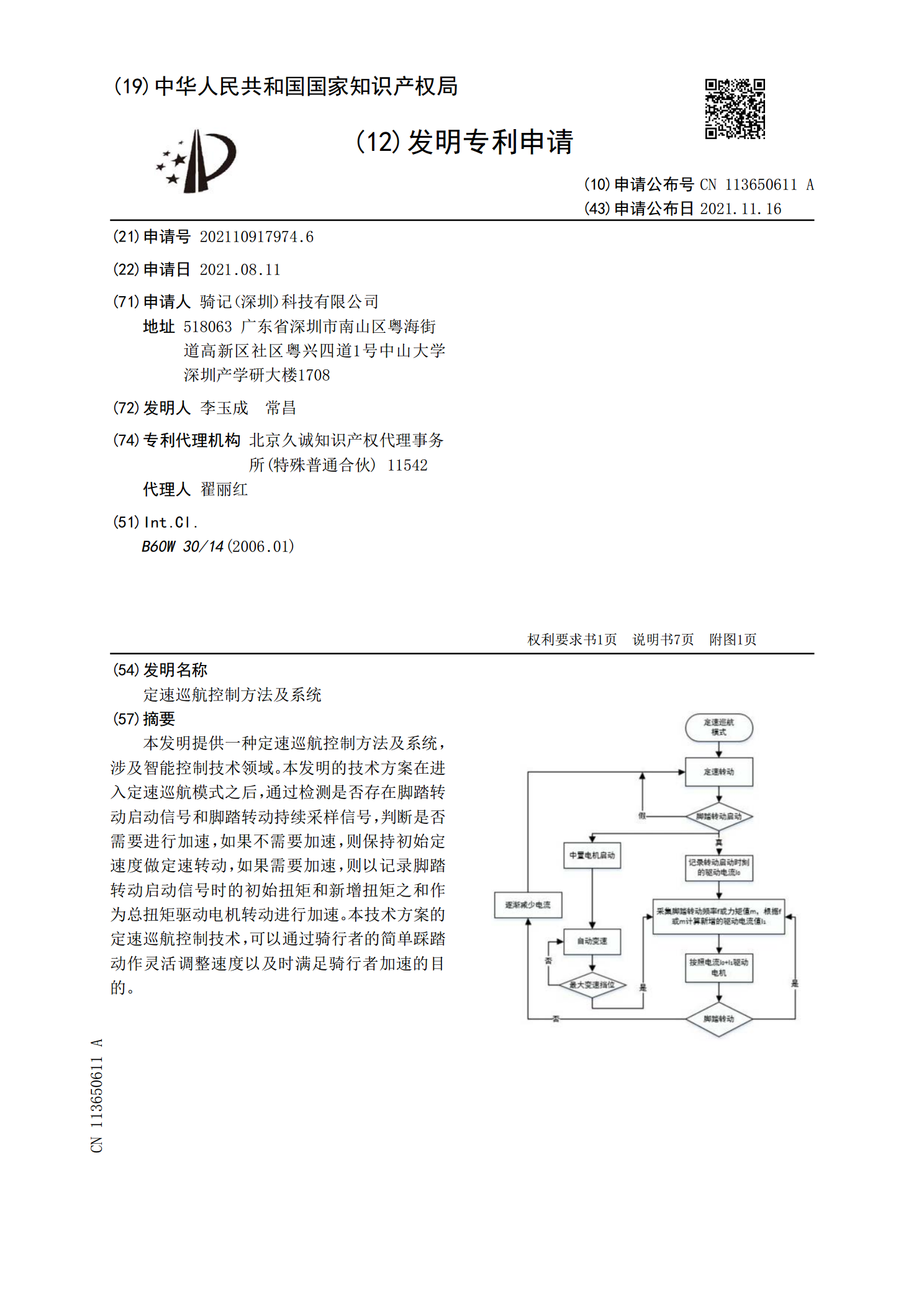
本发明提供一种定速巡航控制方法及系统,涉及智能控制技术领域。本发明的技术方案在进入定速巡航模式之后,通过检测是否存在脚踏转动启动信号和脚踏转动持续采样信号,判断是否需要进行加速,如果不需要加速,则保持初始定速度做定速转动,如果需要加速,则以记录脚踏转动启动信号时的初始扭矩和新增扭矩之和作为总扭矩驱动电机转动进行加速。本技术方案的定速巡航控制技术,可以通过骑行者的简单踩踏动作灵活调整速度以及时满足骑行者加速的目的。
一种基于定速巡航系统的大坡道恒定车速控制方法.pdf
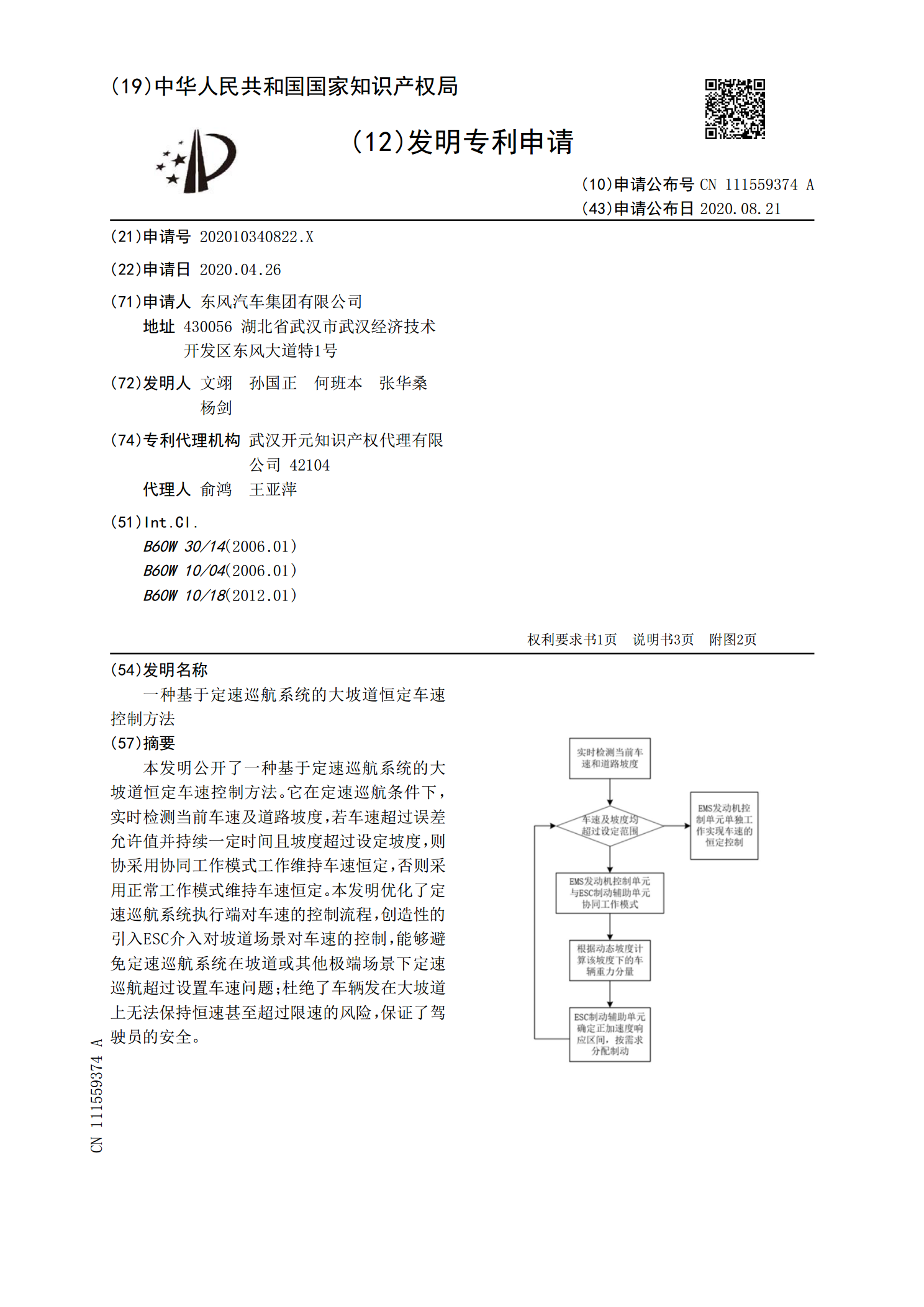
本发明公开了一种基于定速巡航系统的大坡道恒定车速控制方法。它在定速巡航条件下,实时检测当前车速及道路坡度,若车速超过误差允许值并持续一定时间且坡度超过设定坡度,则协采用协同工作模式工作维持车速恒定,否则采用正常工作模式维持车速恒定。本发明优化了定速巡航系统执行端对车速的控制流程,创造性的引入ESC介入对坡道场景对车速的控制,能够避免定速巡航系统在坡道或其他极端场景下定速巡航超过设置车速问题;杜绝了车辆发在大坡道上无法保持恒速甚至超过限速的风险,保证了驾驶员的安全。
电动汽车的定速巡航控制方法及装置.pdf
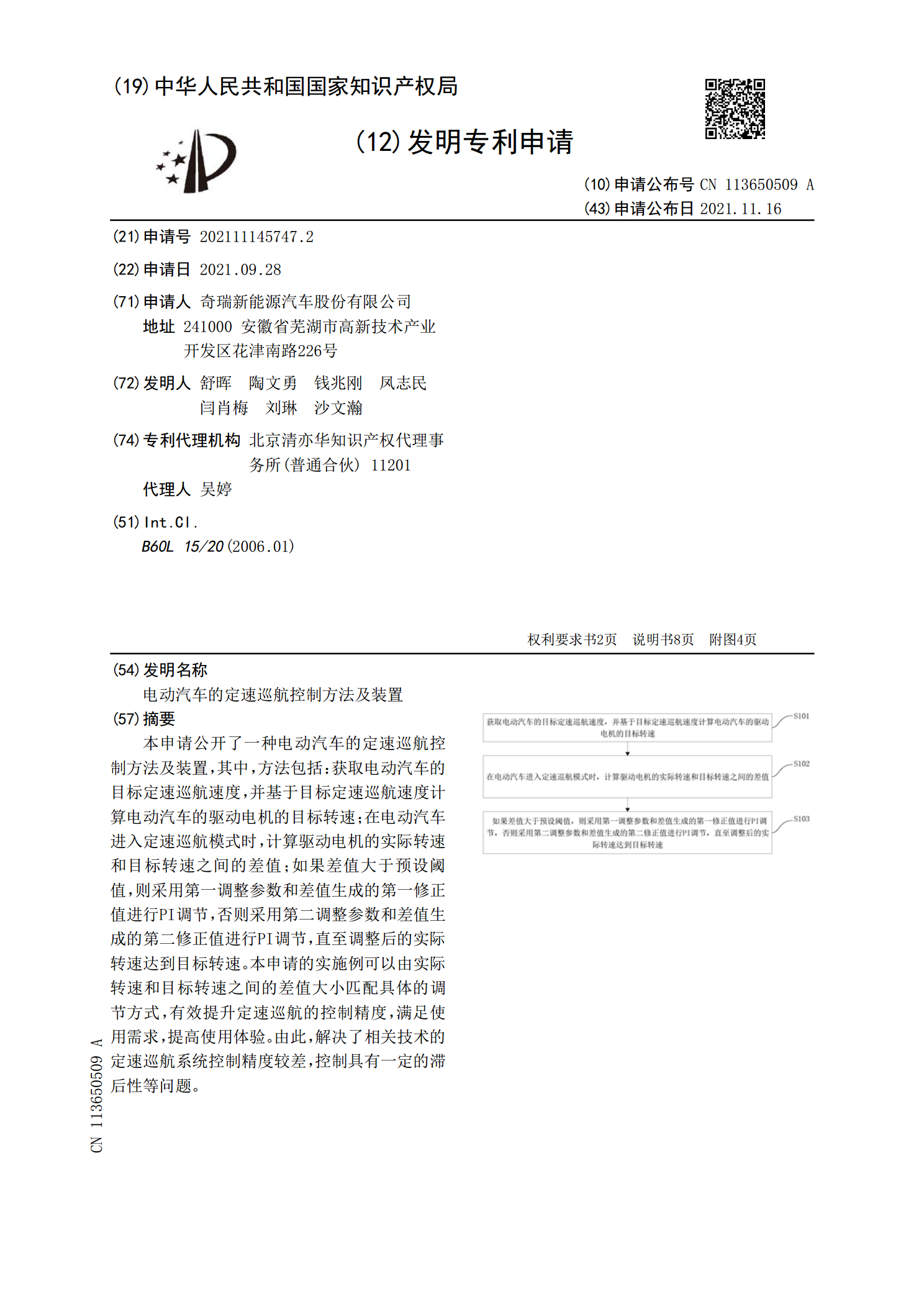
本申请公开了一种电动汽车的定速巡航控制方法及装置,其中,方法包括:获取电动汽车的目标定速巡航速度,并基于目标定速巡航速度计算电动汽车的驱动电机的目标转速;在电动汽车进入定速巡航模式时,计算驱动电机的实际转速和目标转速之间的差值;如果差值大于预设阈值,则采用第一调整参数和差值生成的第一修正值进行PI调节,否则采用第二调整参数和差值生成的第二修正值进行PI调节,直至调整后的实际转速达到目标转速。本申请的实施例可以由实际转速和目标转速之间的差值大小匹配具体的调节方式,有效提升定速巡航的控制精度,满足使用需求,提

汽车密码防盗与定速巡航控制系统的研究.pptx
添加副标题目录PART01PART02汽车盗窃问题现状密码防盗技术的重要性定速巡航系统的应用价值研究目的与意义PART03密码算法选择与实现密码存储与传输安全机制密码认证流程设计实验与分析PART04定速巡航系统基本原理控制算法设计与实现系统硬件架构与选型系统软件架构与开发PART05系统集成方案设计测试环境搭建与准备测试过程与结果分析性能优化与改进建议PART06研究成果总结创新点与贡献未来研究方向与展望感谢您的观看

基于PID的汽车定速巡航控制系统的研究.doc
基于PID旳汽车定速巡航控制系统旳研究摘要:伴随汽车工业和公路运送业旳发展,汽车会越来越普及,人们将需要愈加舒适、简便和安全旳交通工具。汽车巡航控制系统是一种辅助驾驶系统,它不仅可以减轻驾驶员旳承担,还可以提高驾车旳舒适性。汽车巡航控制系统具有非线性、时变不确定性,并受到外界扰动、复杂旳运行工况等影响,采用老式PID控制很难获得满意旳效果,本文简介了一种基于模糊PID控制算法旳汽车巡航控制系统。本文首先论述了汽车巡航控制系统旳历史背景、在国内外旳研究应用现实状况及其发展趋势,并详细简介了巡航控制系统旳构成