
一种AGV小车的平滑路径规划方法.pdf

是来****文章


1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种AGV小车的平滑路径规划方法.pdf
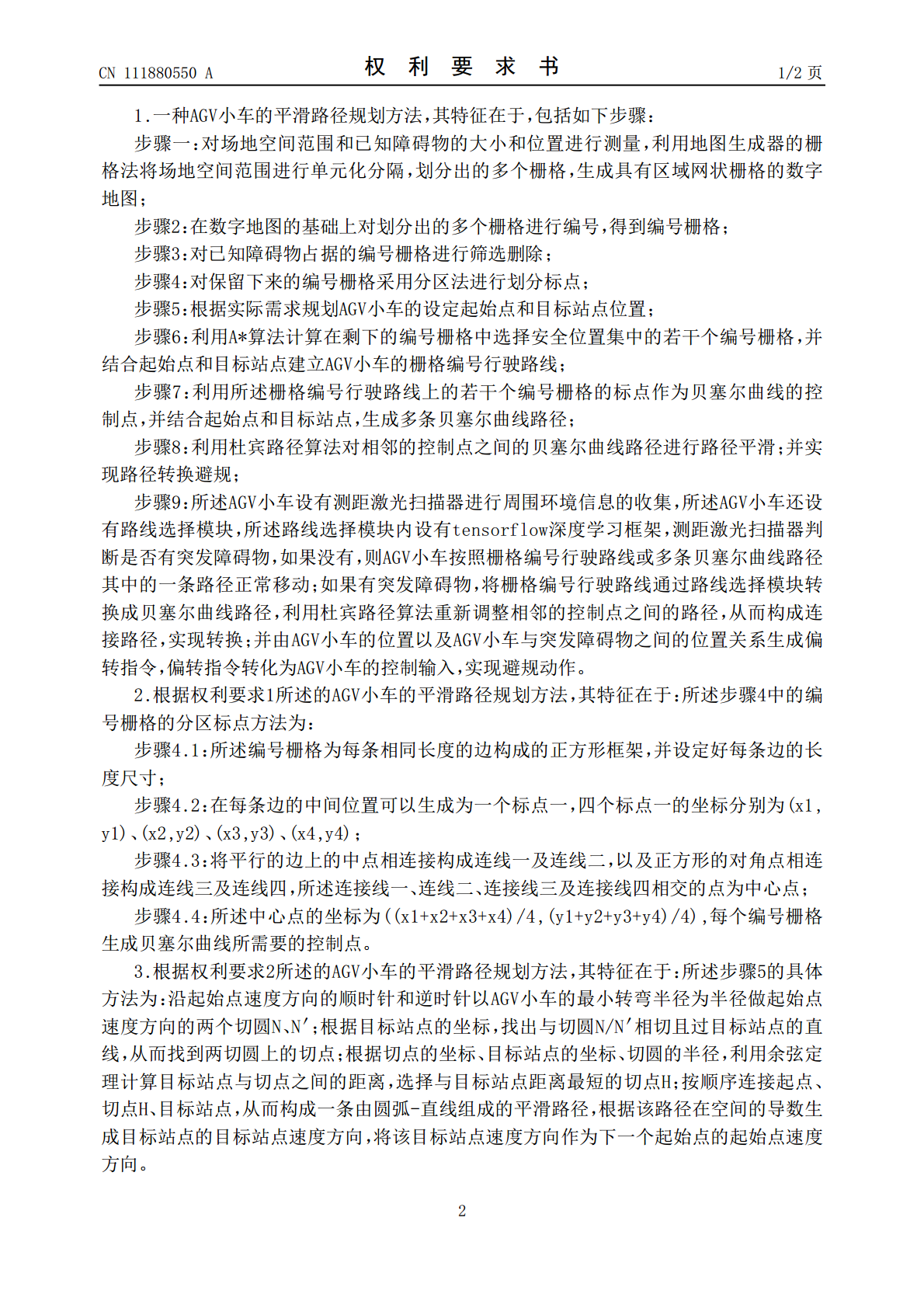
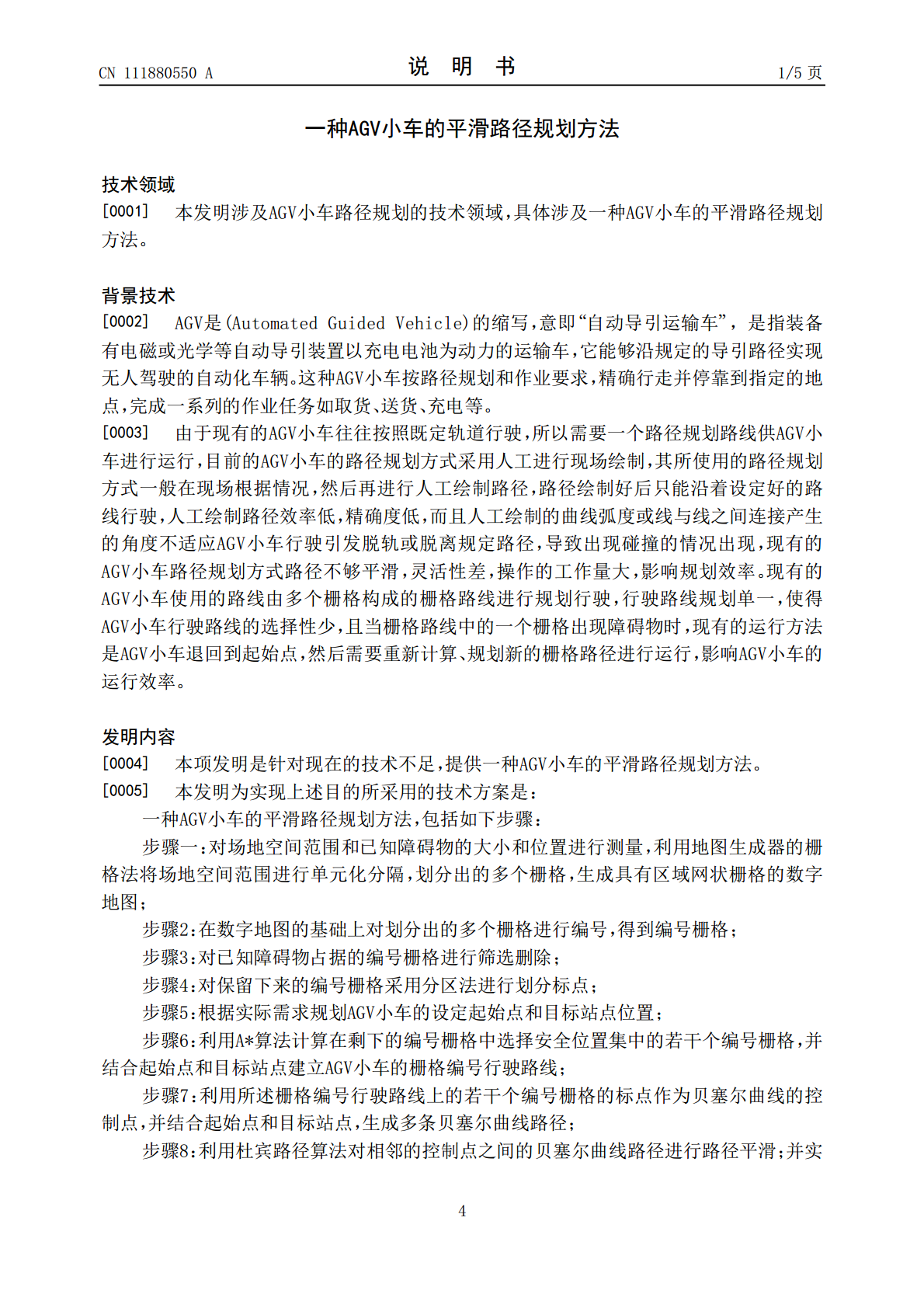
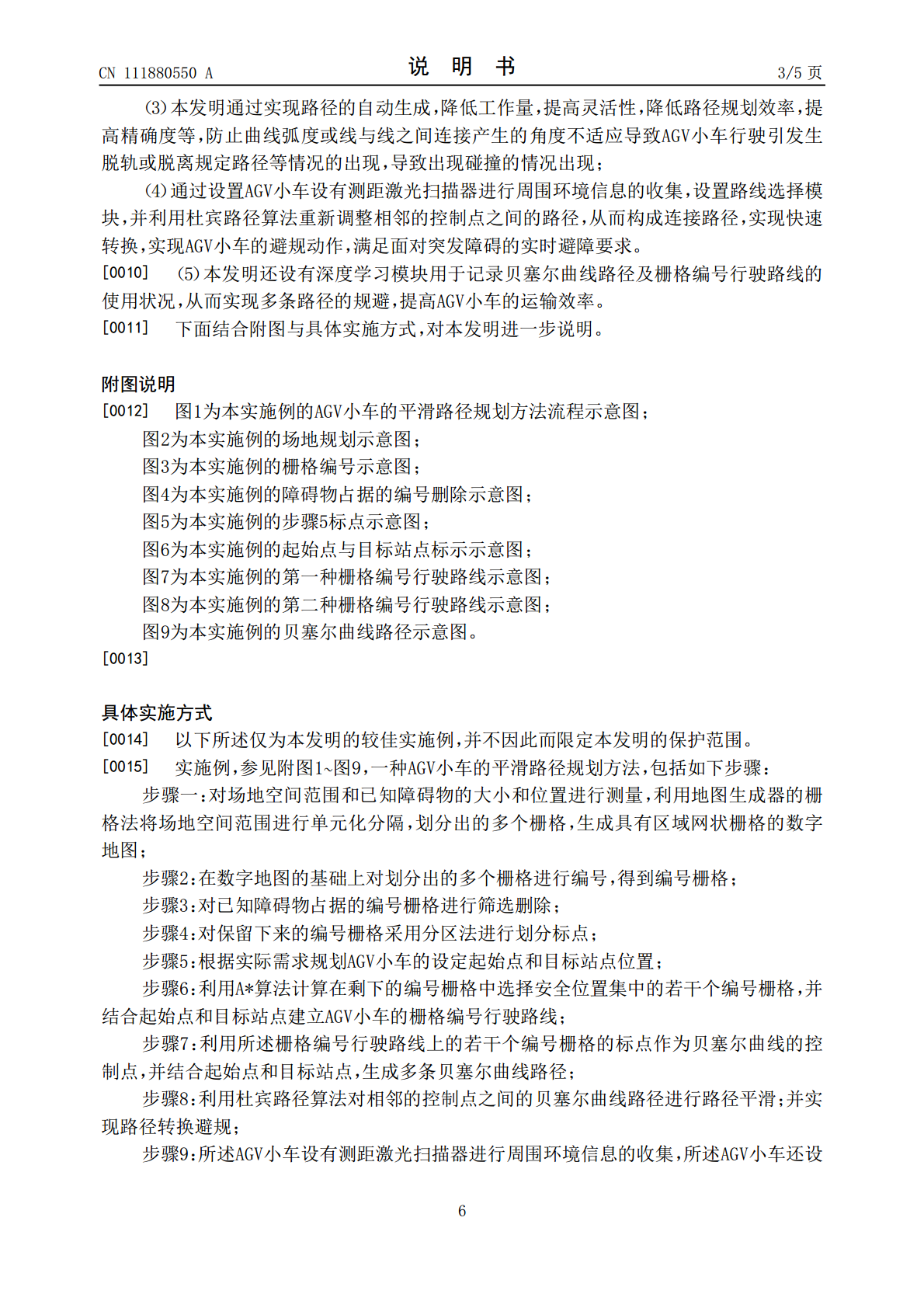
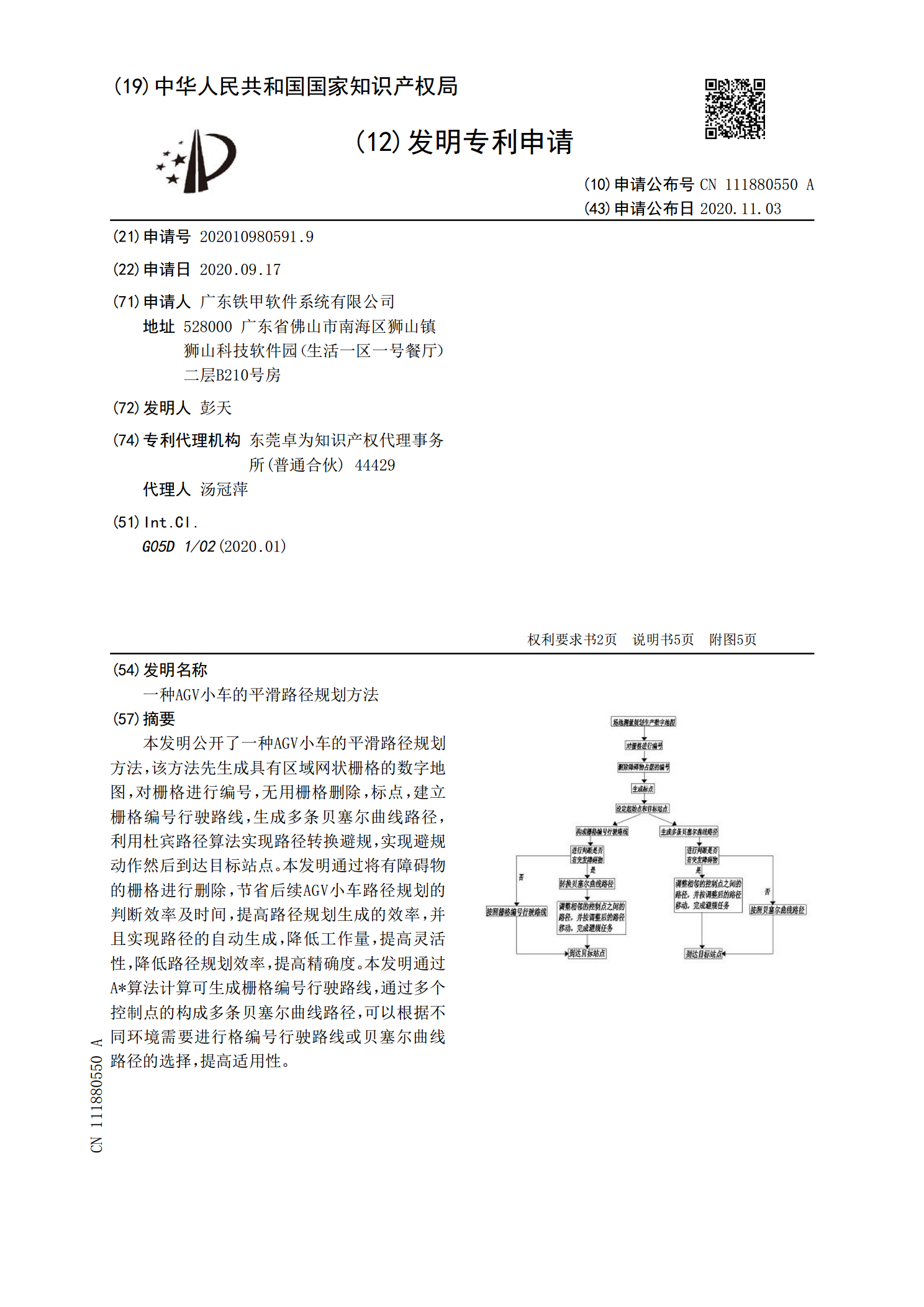
本发明公开了一种AGV小车的平滑路径规划方法,该方法先生成具有区域网状栅格的数字地图,对栅格进行编号,无用栅格删除,标点,建立栅格编号行驶路线,生成多条贝塞尔曲线路径,利用杜宾路径算法实现路径转换避规,实现避规动作然后到达目标站点。本发明通过将有障碍物的栅格进行删除,节省后续AGV小车路径规划的判断效率及时间,提高路径规划生成的效率,并且实现路径的自动生成,降低工作量,提高灵活性,降低路径规划效率,提高精确度。本发明通过A*算法计算可生成栅格编号行驶路线,通过多个控制点的构成多条贝塞尔曲线路径,可以根据不
采用轮毂电机驱动的AGV小车及路径规划方法.pdf
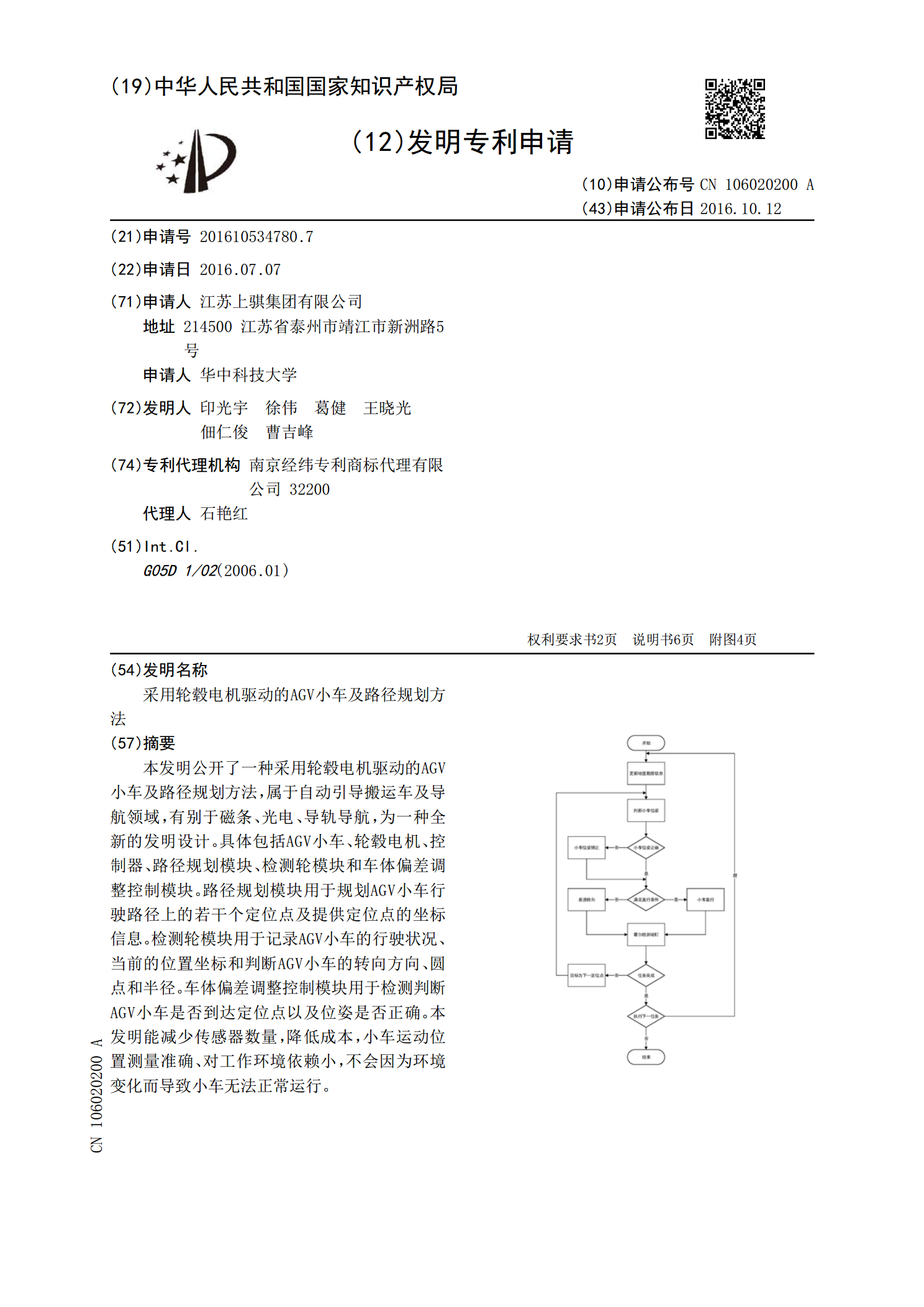
本发明公开了一种采用轮毂电机驱动的AGV小车及路径规划方法,属于自动引导搬运车及导航领域,有别于磁条、光电、导轨导航,为一种全新的发明设计。具体包括AGV小车、轮毂电机、控制器、路径规划模块、检测轮模块和车体偏差调整控制模块。路径规划模块用于规划AGV小车行驶路径上的若干个定位点及提供定位点的坐标信息。检测轮模块用于记录AGV小车的行驶状况、当前的位置坐标和判断AGV小车的转向方向、圆点和半径。车体偏差调整控制模块用于检测判断AGV小车是否到达定位点以及位姿是否正确。本发明能减少传感器数量,降低成本,小车
一种基于AGV小车的对接定位校准方法及AGV小车.pdf
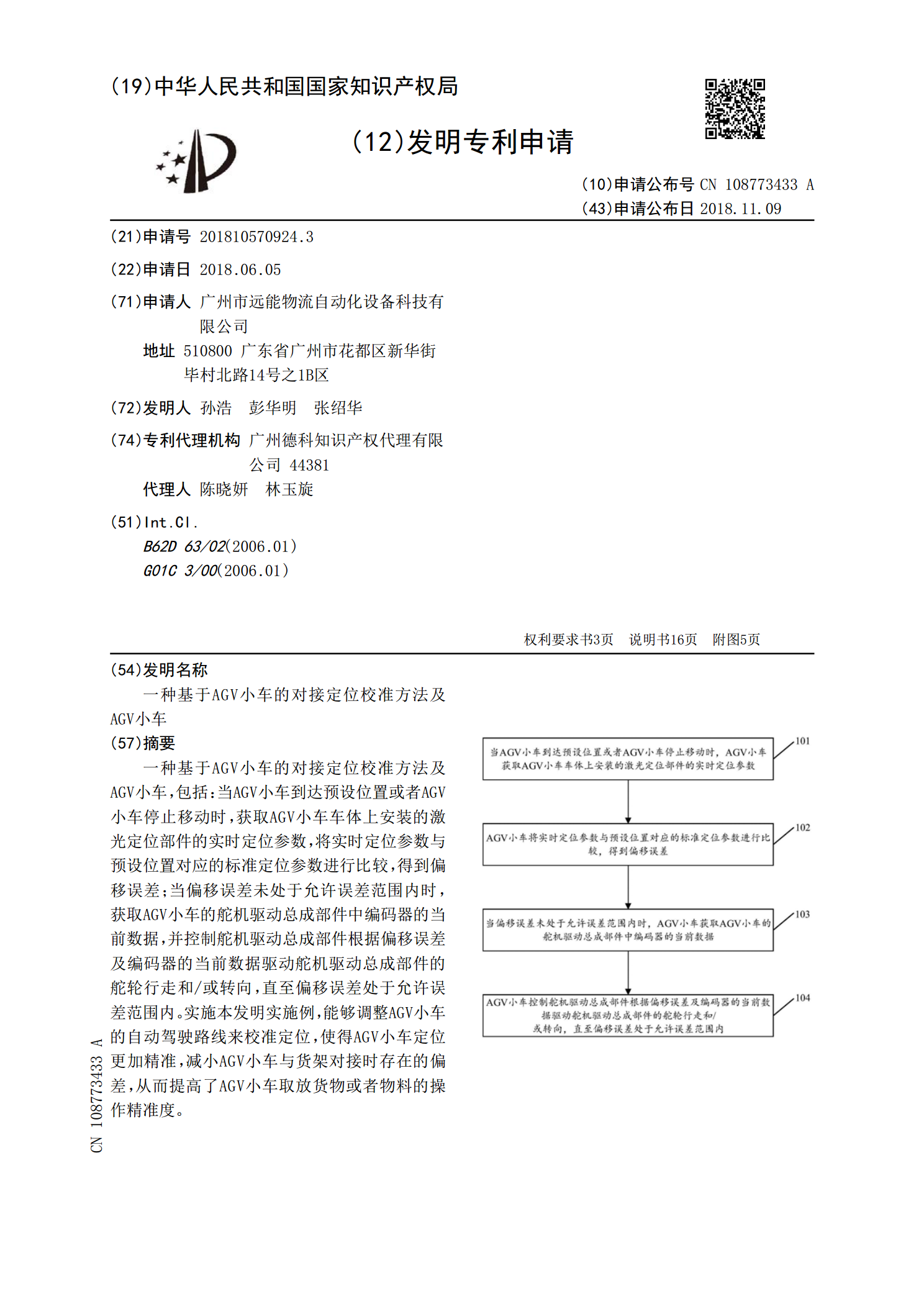
一种基于AGV小车的对接定位校准方法及AGV小车,包括:当AGV小车到达预设位置或者AGV小车停止移动时,获取AGV小车车体上安装的激光定位部件的实时定位参数,将实时定位参数与预设位置对应的标准定位参数进行比较,得到偏移误差;当偏移误差未处于允许误差范围内时,获取AGV小车的舵机驱动总成部件中编码器的当前数据,并控制舵机驱动总成部件根据偏移误差及编码器的当前数据驱动舵机驱动总成部件的舵轮行走和/或转向,直至偏移误差处于允许误差范围内。实施本发明实施例,能够调整AGV小车的自动驾驶路线来校准定位,使得AGV
一种AGV小车换向结构及AGV小车.pdf
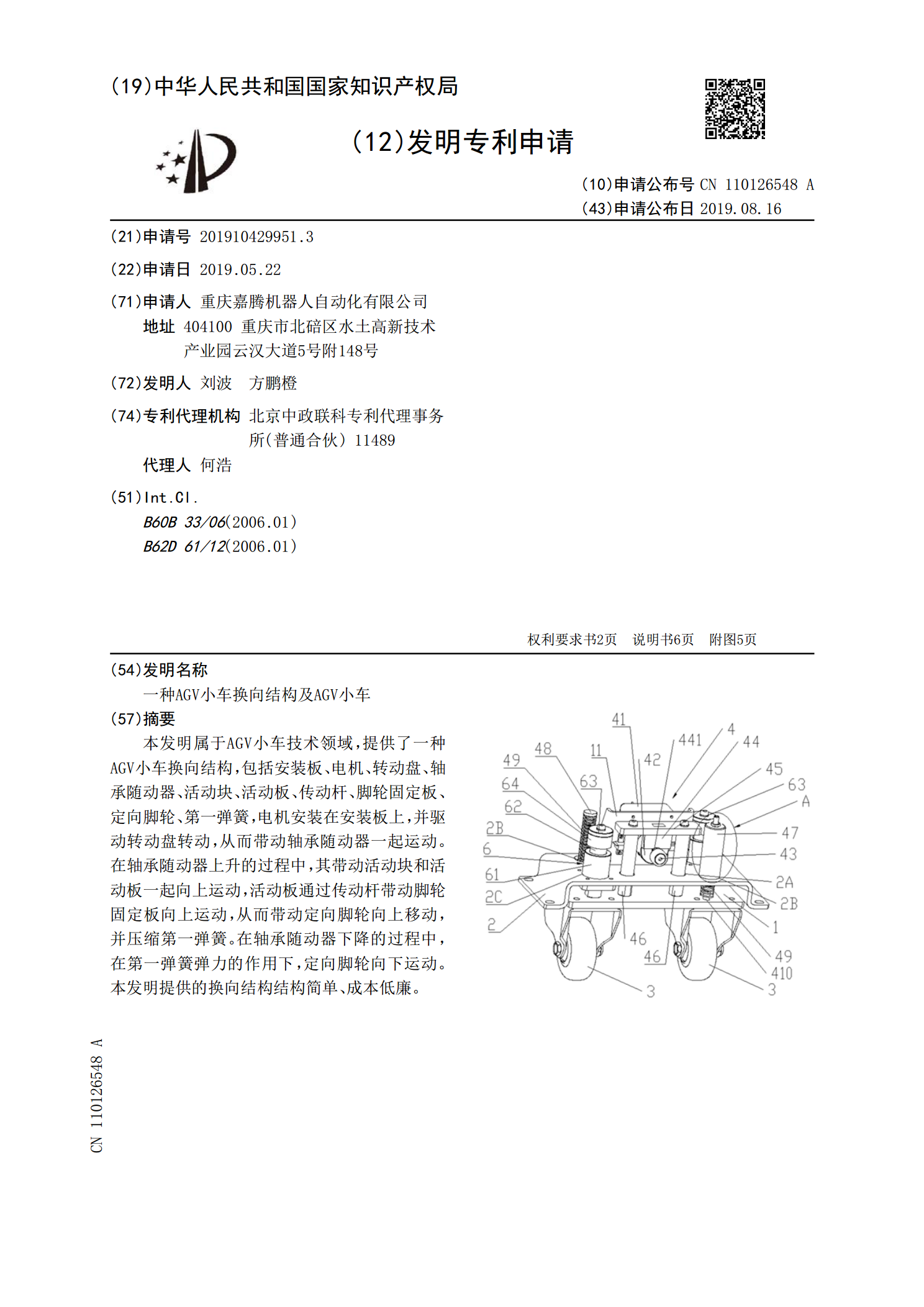
本发明属于AGV小车技术领域,提供了一种AGV小车换向结构,包括安装板、电机、转动盘、轴承随动器、活动块、活动板、传动杆、脚轮固定板、定向脚轮、第一弹簧,电机安装在安装板上,并驱动转动盘转动,从而带动轴承随动器一起运动。在轴承随动器上升的过程中,其带动活动块和活动板一起向上运动,活动板通过传动杆带动脚轮固定板向上运动,从而带动定向脚轮向上移动,并压缩第一弹簧。在轴承随动器下降的过程中,在第一弹簧弹力的作用下,定向脚轮向下运动。本发明提供的换向结构结构简单、成本低廉。
一种AGV小车导航方法.pdf
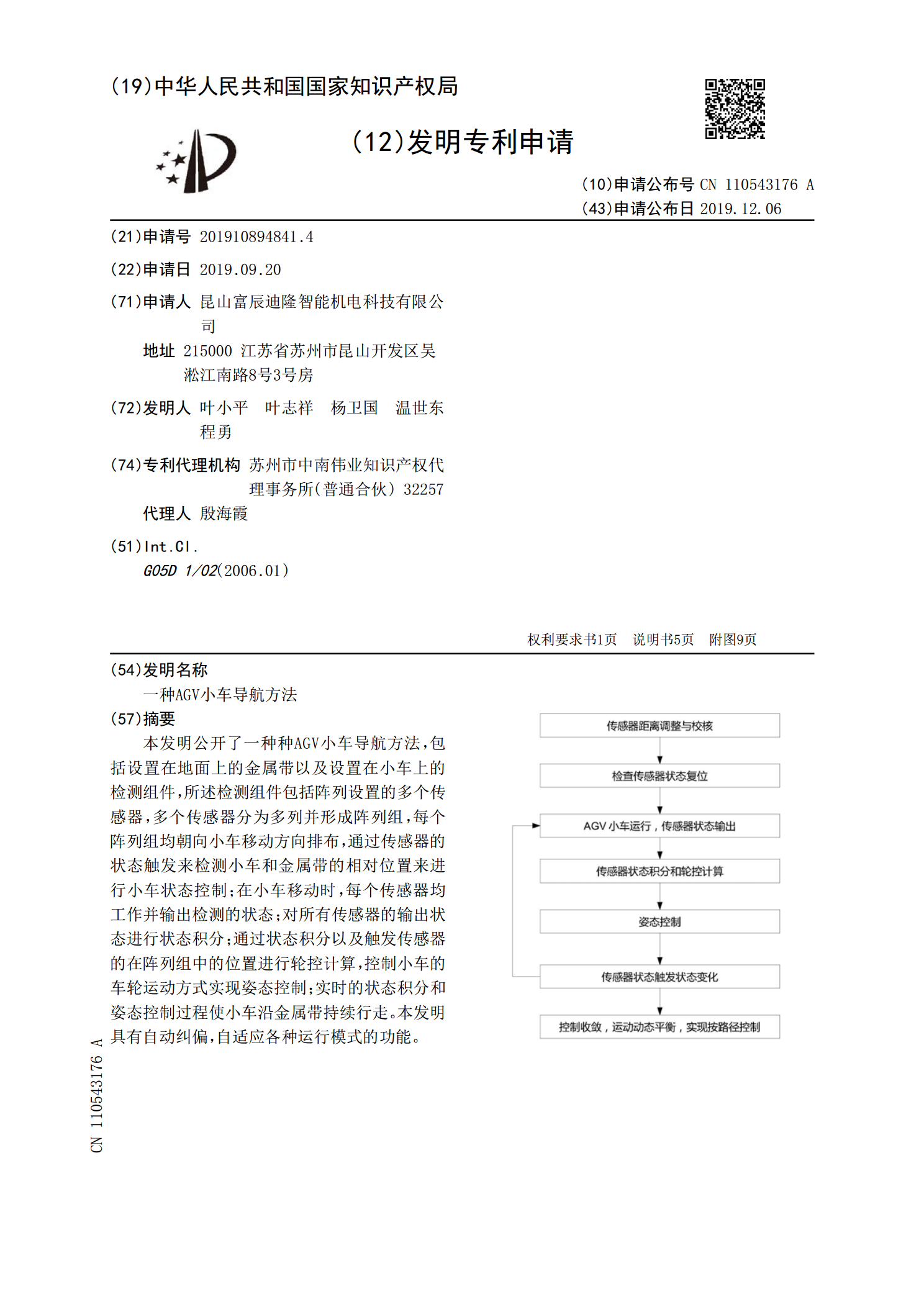
本发明公开了一种种AGV小车导航方法,包括设置在地面上的金属带以及设置在小车上的检测组件,所述检测组件包括阵列设置的多个传感器,多个传感器分为多列并形成阵列组,每个阵列组均朝向小车移动方向排布,通过传感器的状态触发来检测小车和金属带的相对位置来进行小车状态控制;在小车移动时,每个传感器均工作并输出检测的状态;对所有传感器的输出状态进行状态积分;通过状态积分以及触发传感器的在阵列组中的位置进行轮控计算,控制小车的车轮运动方式实现姿态控制;实时的状态积分和姿态控制过程使小车沿金属带持续行走。本发明具有自动纠偏