
涂覆方法及相应的涂覆设备.pdf

曾琪****是我

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
涂覆设备及相应的涂覆方法.pdf
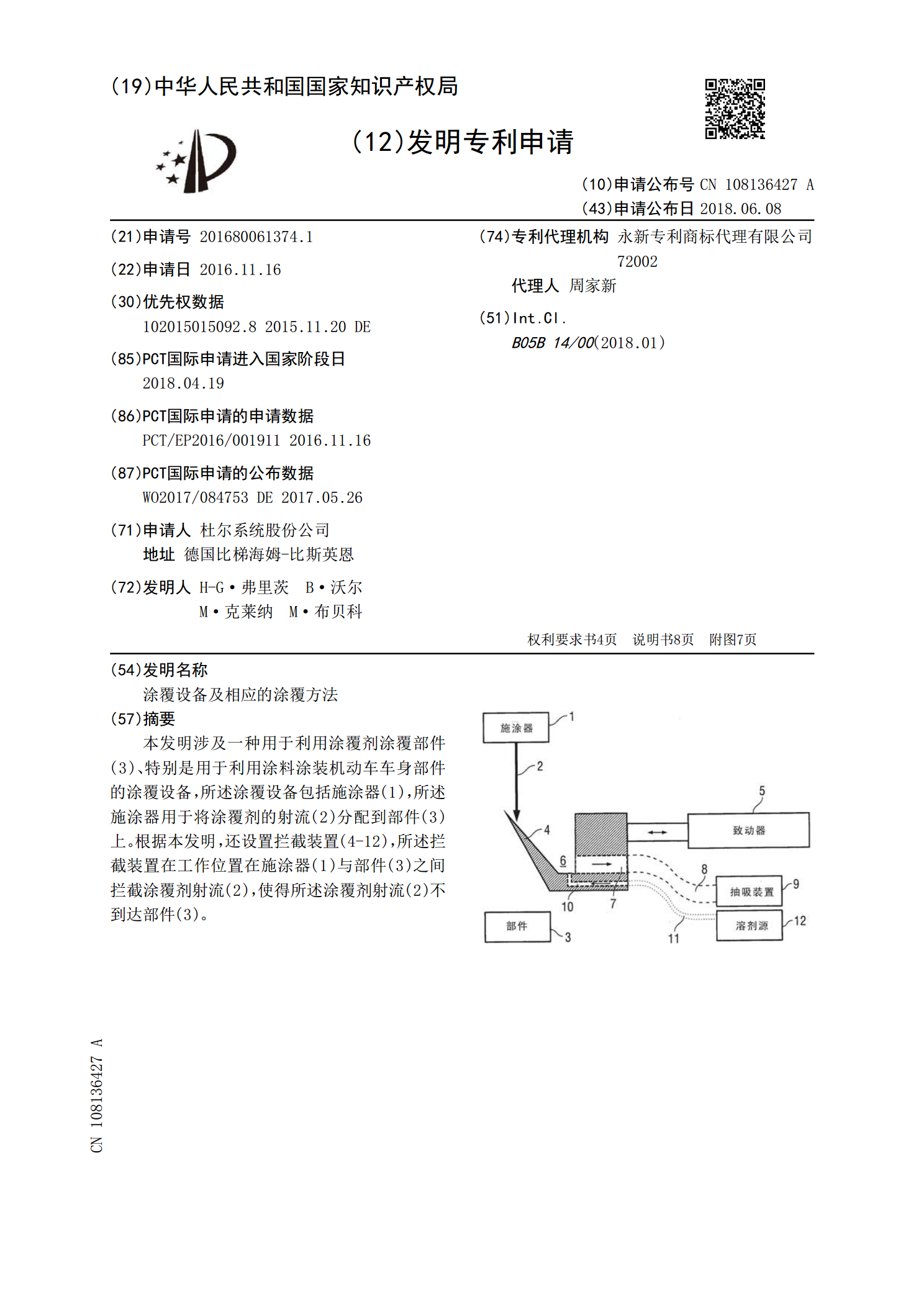
本发明涉及一种用于利用涂覆剂涂覆部件(3)、特别是用于利用涂料涂装机动车车身部件的涂覆设备,所述涂覆设备包括施涂器(1),所述施涂器用于将涂覆剂的射流(2)分配到部件(3)上。根据本发明,还设置拦截装置(4‑12),所述拦截装置在工作位置在施涂器(1)与部件(3)之间拦截涂覆剂射流(2),使得所述涂覆剂射流(2)不到达部件(3)。
涂覆方法及相应的涂覆设备.pdf
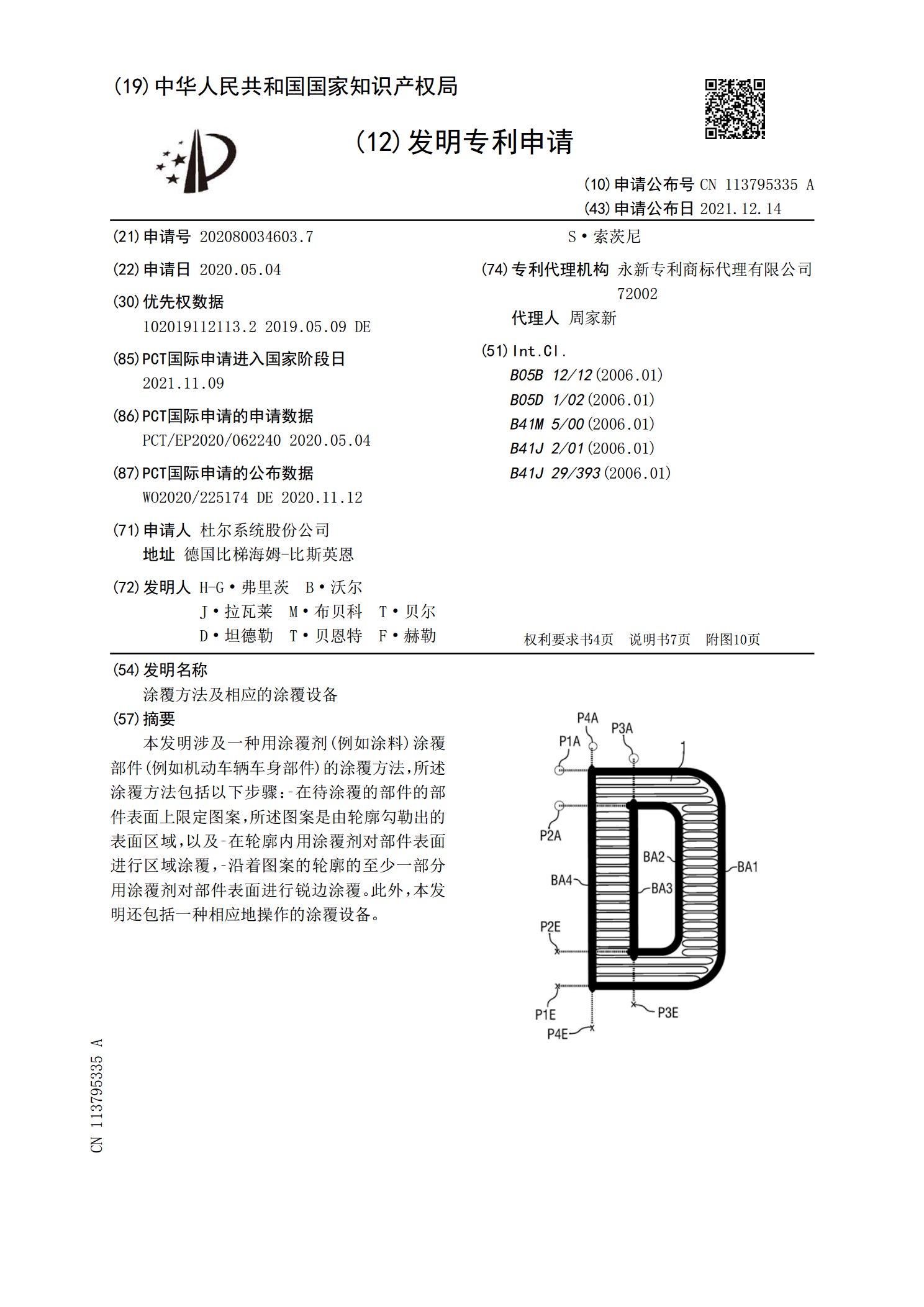
本发明涉及一种用涂覆剂(例如涂料)涂覆部件(例如机动车辆车身部件)的涂覆方法,所述涂覆方法包括以下步骤:‑在待涂覆的部件的部件表面上限定图案,所述图案是由轮廓勾勒出的表面区域,以及‑在轮廓内用涂覆剂对部件表面进行区域涂覆,‑沿着图案的轮廓的至少一部分用涂覆剂对部件表面进行锐边涂覆。此外,本发明还包括一种相应地操作的涂覆设备。
涂覆方法及相应的涂覆设备.pdf
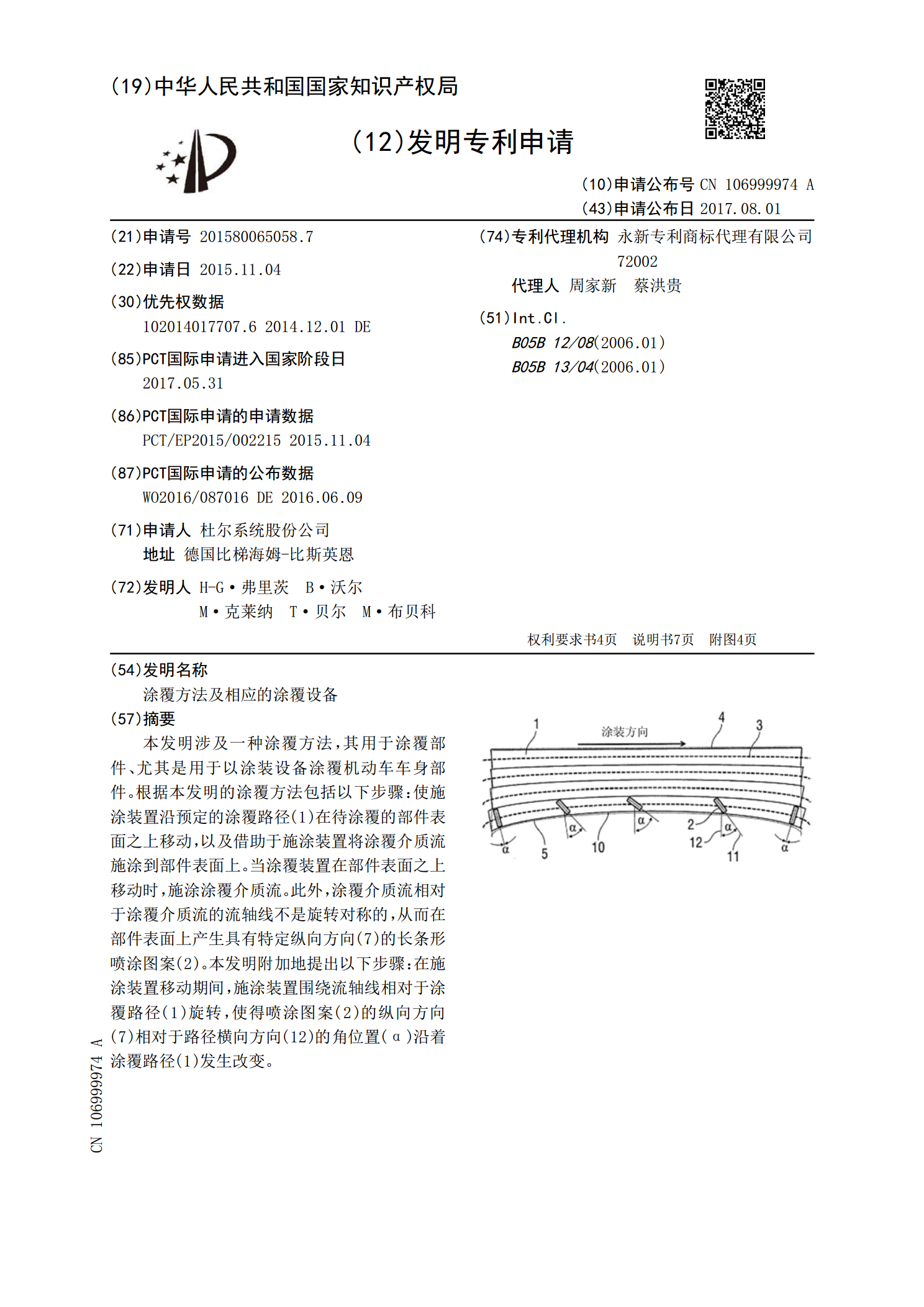
本发明涉及一种涂覆方法,其用于涂覆部件、尤其是用于以涂装设备涂覆机动车车身部件。根据本发明的涂覆方法包括以下步骤:使施涂装置沿预定的涂覆路径(1)在待涂覆的部件表面之上移动,以及借助于施涂装置将涂覆介质流施涂到部件表面上。当涂覆装置在部件表面之上移动时,施涂涂覆介质流。此外,涂覆介质流相对于涂覆介质流的流轴线不是旋转对称的,从而在部件表面上产生具有特定纵向方向(7)的长条形喷涂图案(2)。本发明附加地提出以下步骤:在施涂装置移动期间,施涂装置围绕流轴线相对于涂覆路径(1)旋转,使得喷涂图案(2)的纵向方向
涂覆方法及相应的涂覆设备.pdf
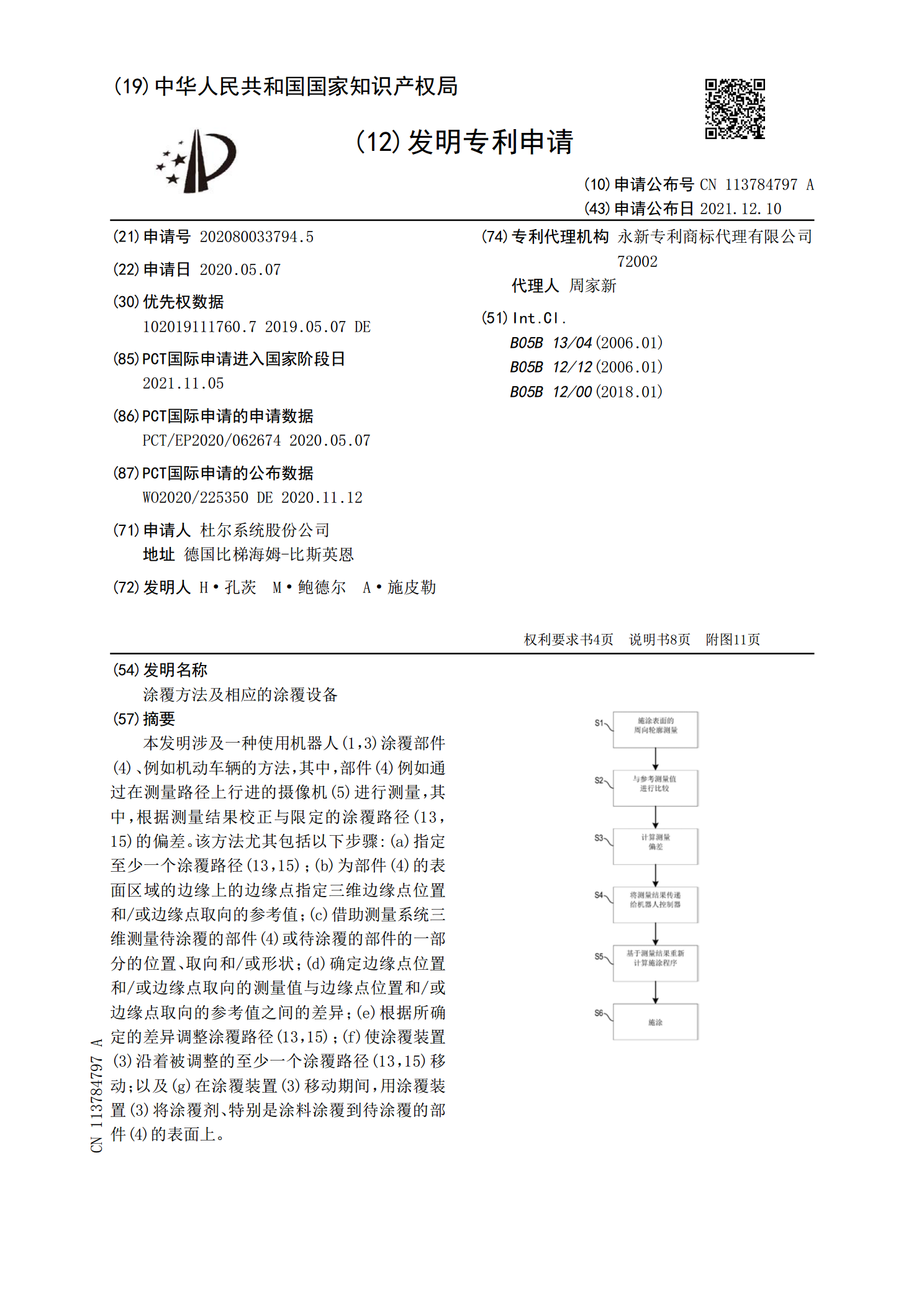
本发明涉及一种使用机器人(1,3)涂覆部件(4)、例如机动车辆的方法,其中,部件(4)例如通过在测量路径上行进的摄像机(5)进行测量,其中,根据测量结果校正与限定的涂覆路径(13,15)的偏差。该方法尤其包括以下步骤:(a)指定至少一个涂覆路径(13,15);(b)为部件(4)的表面区域的边缘上的边缘点指定三维边缘点位置和/或边缘点取向的参考值;(c)借助测量系统三维测量待涂覆的部件(4)或待涂覆的部件的一部分的位置、取向和/或形状;(d)确定边缘点位置和/或边缘点取向的测量值与边缘点位置和/或边缘点取向
涂覆方法及相应的涂覆设备.pdf
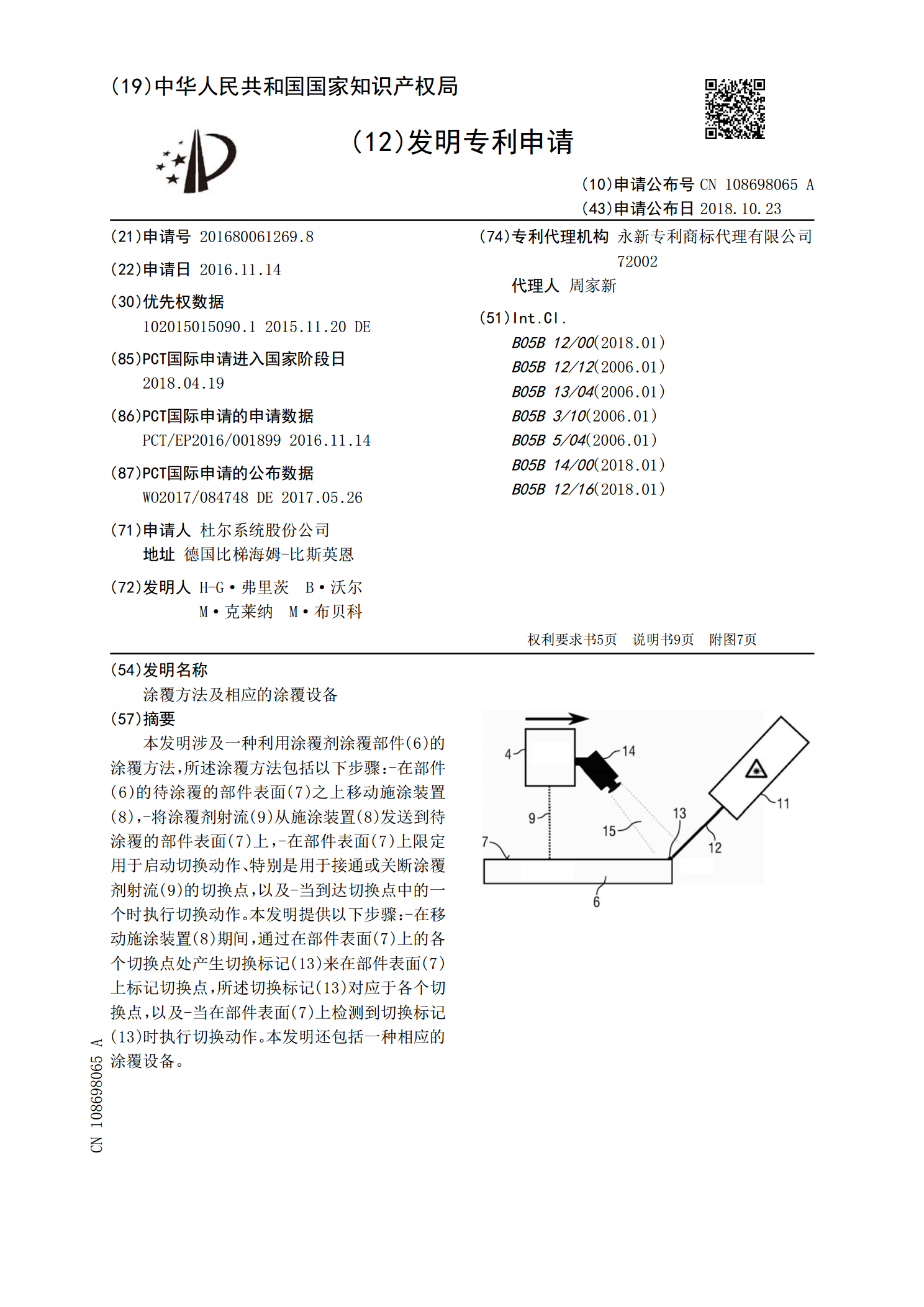
本发明涉及一种利用涂覆剂涂覆部件(6)的涂覆方法,所述涂覆方法包括以下步骤:‑在部件(6)的待涂覆的部件表面(7)之上移动施涂装置(8),‑将涂覆剂射流(9)从施涂装置(8)发送到待涂覆的部件表面(7)上,‑在部件表面(7)上限定用于启动切换动作、特别是用于接通或关断涂覆剂射流(9)的切换点,以及‑当到达切换点中的一个时执行切换动作。本发明提供以下步骤:‑在移动施涂装置(8)期间,通过在部件表面(7)上的各个切换点处产生切换标记(13)来在部件表面(7)上标记切换点,所述切换标记(13)对应于各个切换点,