
一种自动铆合装置.pdf

悠柔****找我

1/5

2/5

3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种自动铆合装置.pdf
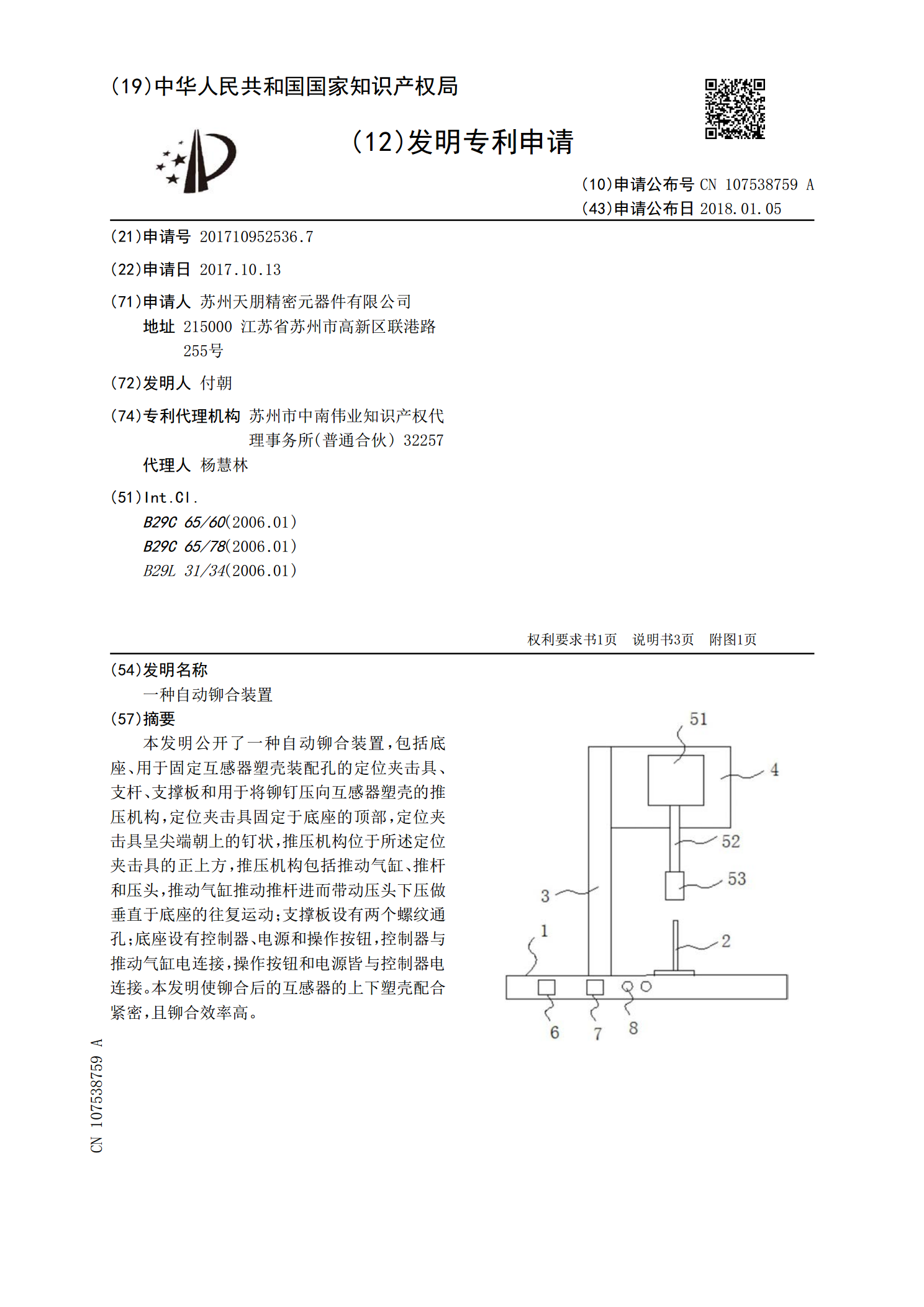
本发明公开了一种自动铆合装置,包括底座、用于固定互感器塑壳装配孔的定位夹击具、支杆、支撑板和用于将铆钉压向互感器塑壳的推压机构,定位夹击具固定于底座的顶部,定位夹击具呈尖端朝上的钉状,推压机构位于所述定位夹击具的正上方,推压机构包括推动气缸、推杆和压头,推动气缸推动推杆进而带动压头下压做垂直于底座的往复运动;支撑板设有两个螺纹通孔;底座设有控制器、电源和操作按钮,控制器与推动气缸电连接,操作按钮和电源皆与控制器电连接。本发明使铆合后的互感器的上下塑壳配合紧密,且铆合效率高。

一种自动铆合装置.pdf
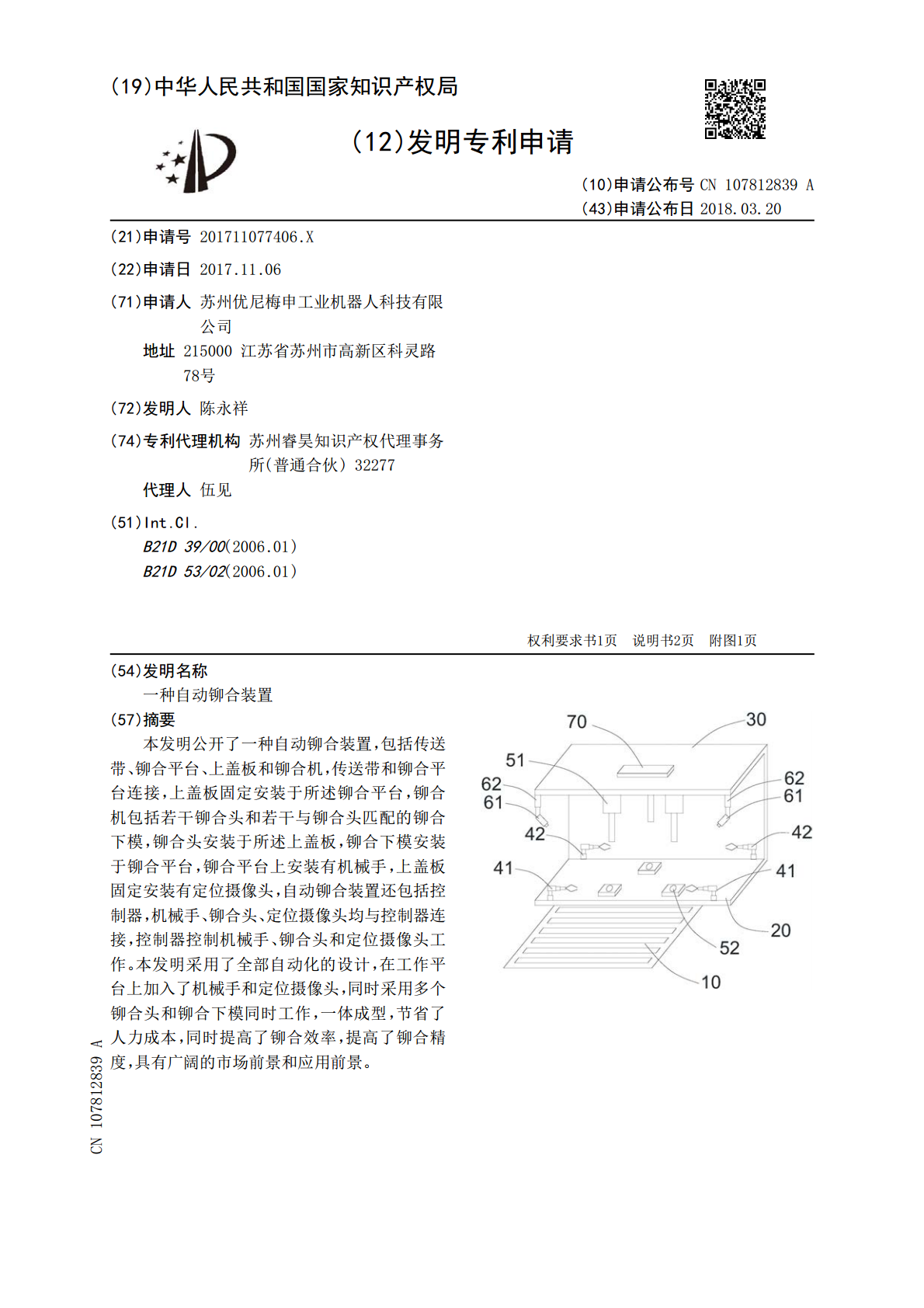
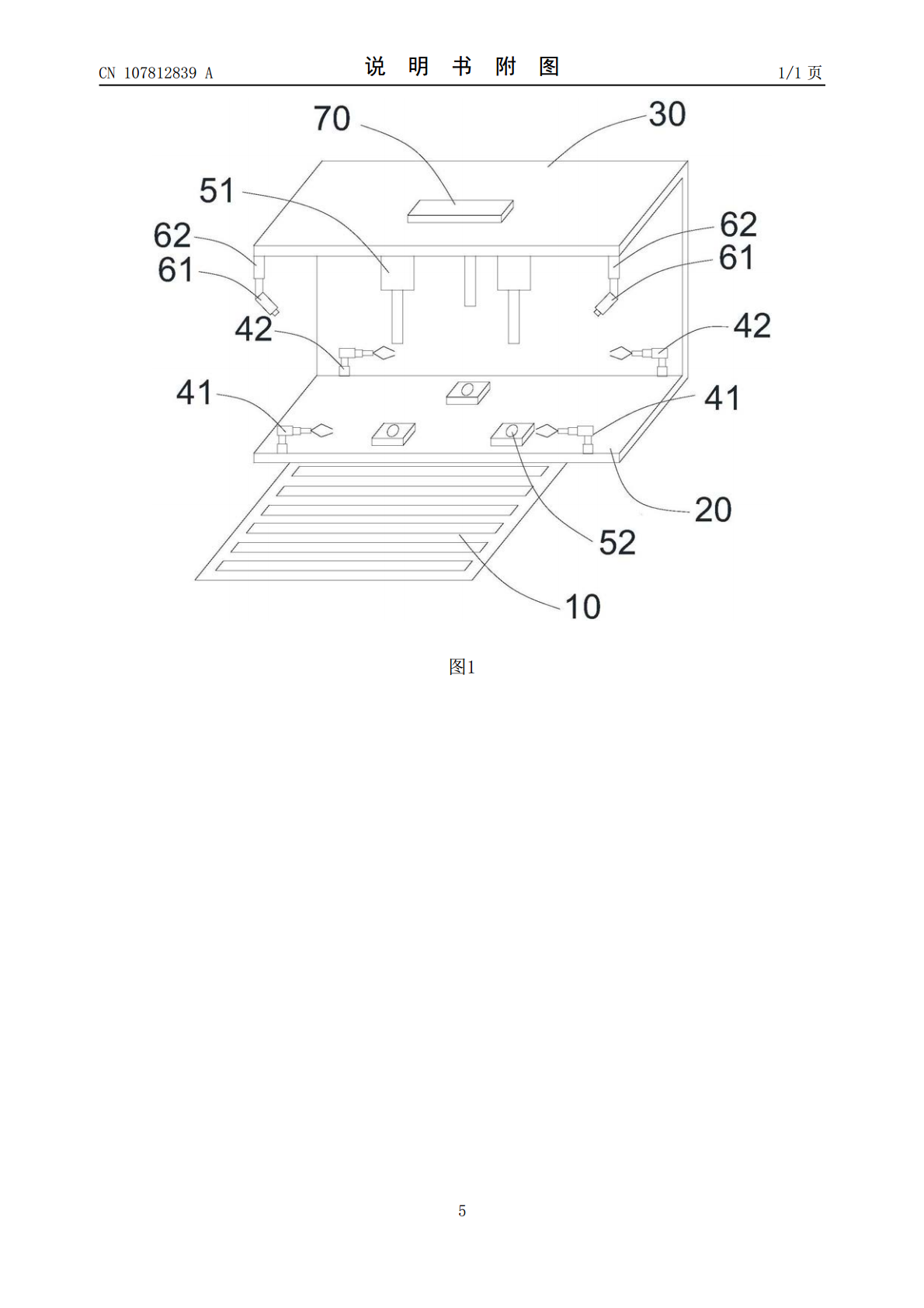
本发明公开了一种自动铆合装置,包括传送带、铆合平台、上盖板和铆合机,传送带和铆合平台连接,上盖板固定安装于所述铆合平台,铆合机包括若干铆合头和若干与铆合头匹配的铆合下模,铆合头安装于所述上盖板,铆合下模安装于铆合平台,铆合平台上安装有机械手,上盖板固定安装有定位摄像头,自动铆合装置还包括控制器,机械手、铆合头、定位摄像头均与控制器连接,控制器控制机械手、铆合头和定位摄像头工作。本发明采用了全部自动化的设计,在工作平台上加入了机械手和定位摄像头,同时采用多个铆合头和铆合下模同时工作,一体成型,节省了人力成本
一种弹片自动铆合装置.pdf
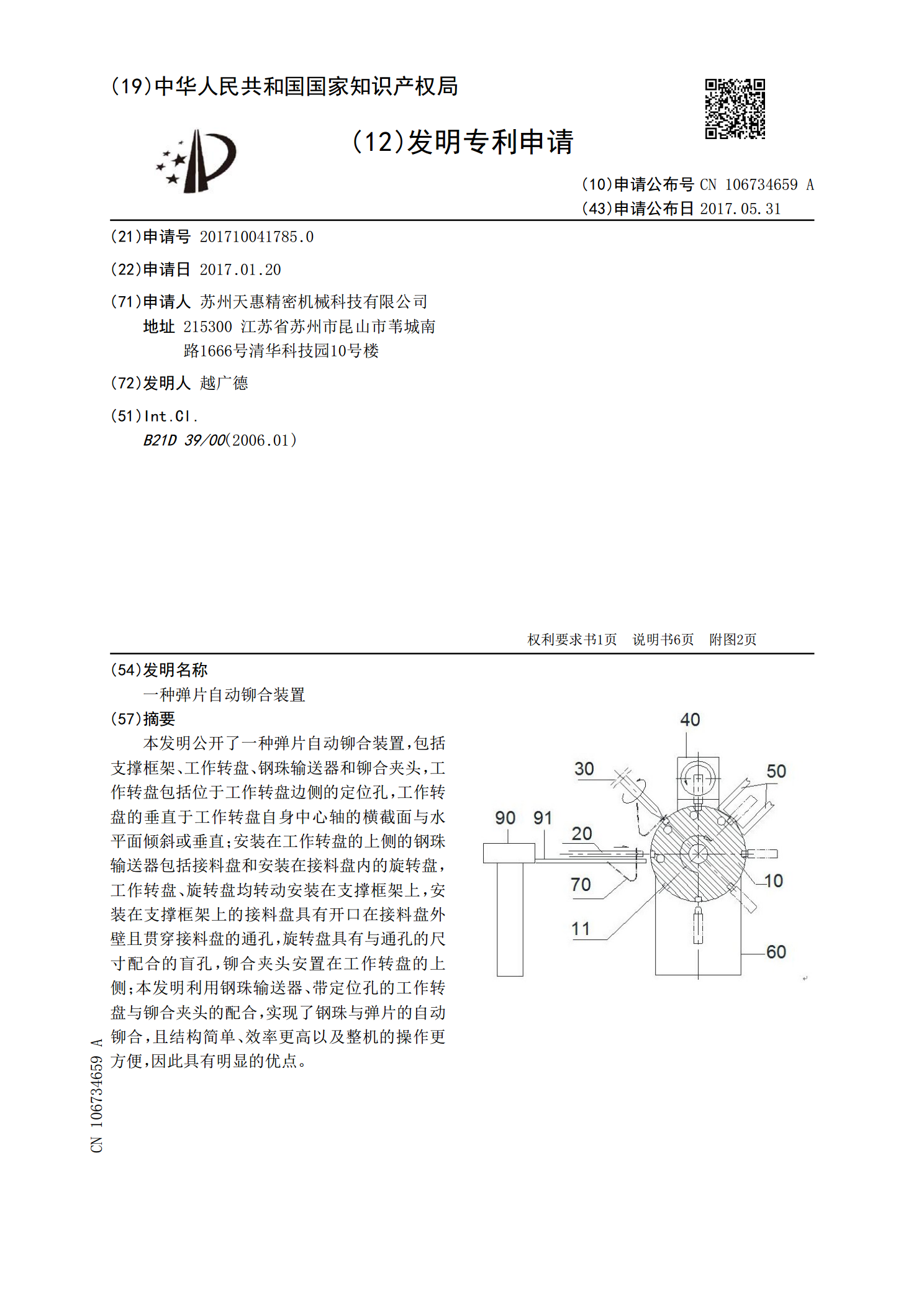
本发明公开了一种弹片自动铆合装置,包括支撑框架、工作转盘、钢珠输送器和铆合夹头,工作转盘包括位于工作转盘边侧的定位孔,工作转盘的垂直于工作转盘自身中心轴的横截面与水平面倾斜或垂直;安装在工作转盘的上侧的钢珠输送器包括接料盘和安装在接料盘内的旋转盘,工作转盘、旋转盘均转动安装在支撑框架上,安装在支撑框架上的接料盘具有开口在接料盘外壁且贯穿接料盘的通孔,旋转盘具有与通孔的尺寸配合的盲孔,铆合夹头安置在工作转盘的上侧;本发明利用钢珠输送器、带定位孔的工作转盘与铆合夹头的配合,实现了钢珠与弹片的自动铆合,且结构简

一种脚轮自动装配铆合装置.pdf
本发明提供了一种脚轮自动装配铆合装置,包括流转台、上铆钉机构、上底板机构、注油机构、送钢珠机构、冲压机构和卸料机构,对铆钉、底板、黄油、钢珠等自动上料,滑块流转到冲压机构工位时自动冲压,最后自动卸料,一系列动作由机械自动化代替人工操作,使得脚轮装配过程中难度较大的工位都由机械代替人力,降低了装配过程中对人工的依赖程度,从而降低生产成本,降低安全隐患。
轴卡簧自动铆合装置.pdf
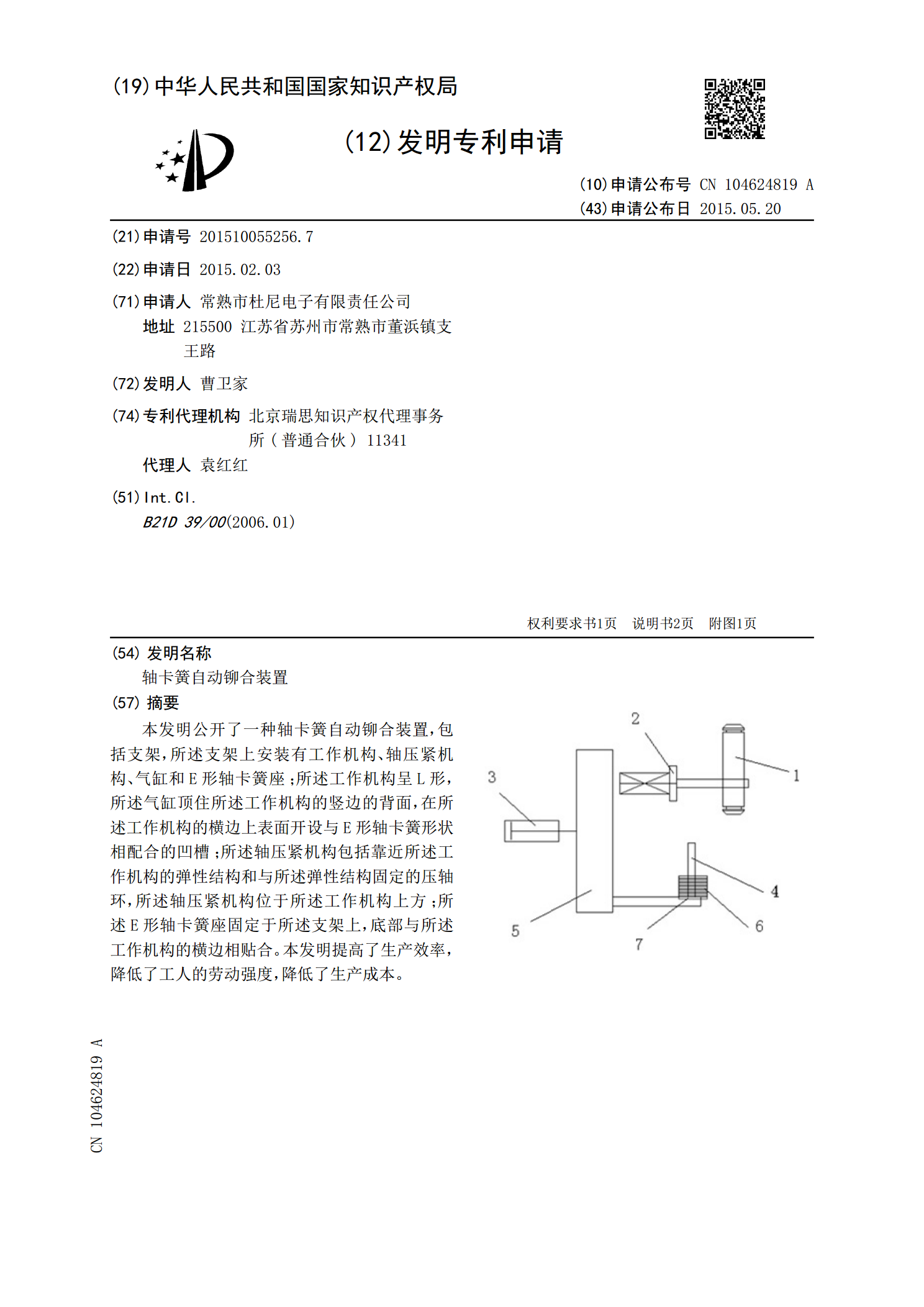
本发明公开了一种轴卡簧自动铆合装置,包括支架,所述支架上安装有工作机构、轴压紧机构、气缸和E形轴卡簧座;所述工作机构呈L形,所述气缸顶住所述工作机构的竖边的背面,在所述工作机构的横边上表面开设与E形轴卡簧形状相配合的凹槽;所述轴压紧机构包括靠近所述工作机构的弹性结构和与所述弹性结构固定的压轴环,所述轴压紧机构位于所述工作机构上方;所述E形轴卡簧座固定于所述支架上,底部与所述工作机构的横边相贴合。本发明提高了生产效率,降低了工人的劳动强度,降低了生产成本。