
涂胶轨迹的获取方法及涂胶方法、装置和涂胶轨迹生成系统.pdf

雨巷****珺琦


1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共33页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
涂胶轨迹的获取方法及涂胶方法、装置和涂胶轨迹生成系统.pdf
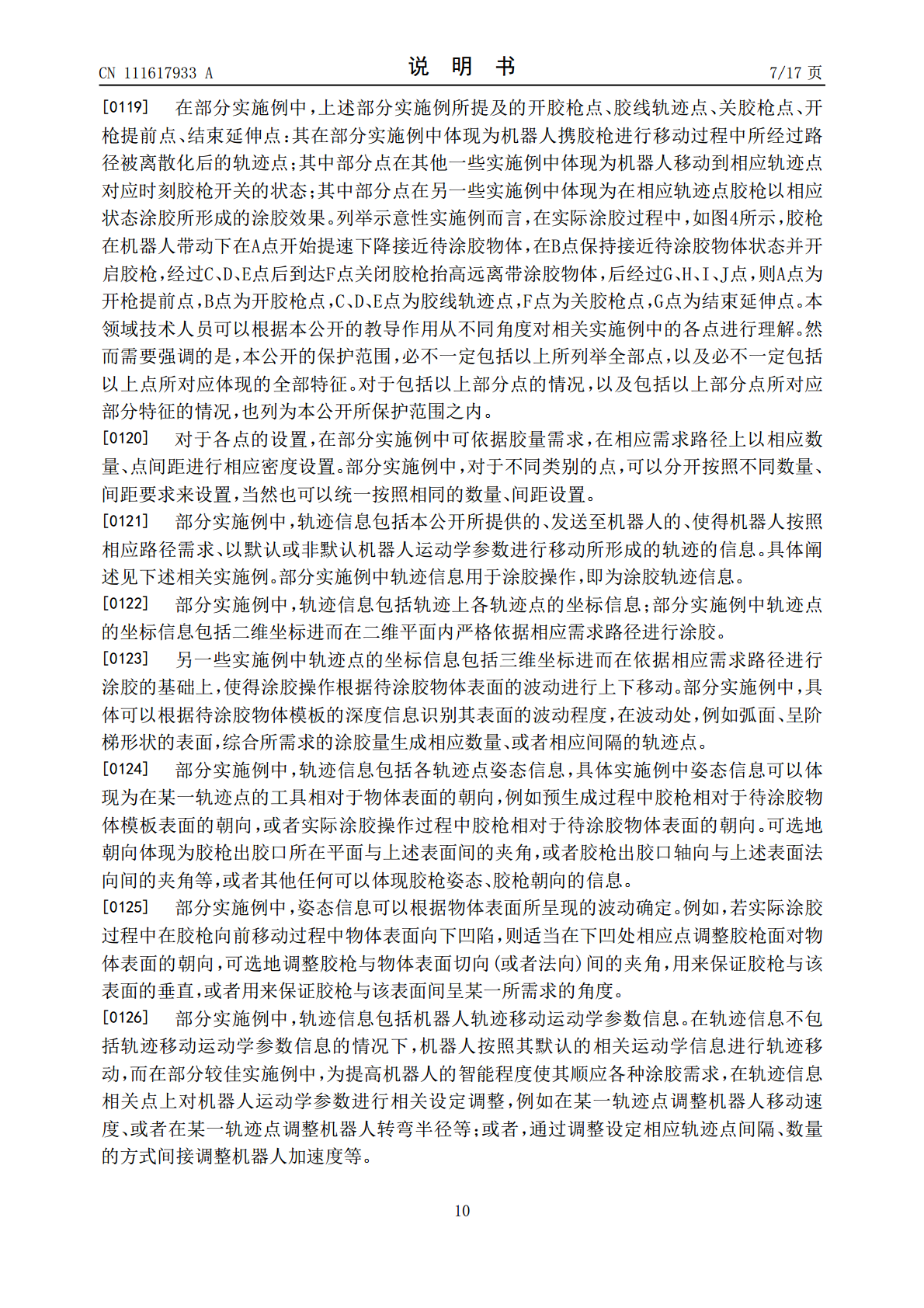
本实施例提供一种涂胶轨迹的获取方法及涂胶方法、装置及涂胶轨迹生成系统,属于工业智能制造领域。方法包括:图像识别各待涂胶物体模板的需求路径;基于各需求路径生成相应轨迹信息,轨迹信息包括开胶枪点、胶线轨迹点、关胶枪点、开枪提前点和结束延伸点,在相应轨迹中胶线轨迹点位于开胶枪点和关胶枪点之间,开枪提前点位于开胶枪点之前,结束延伸点位于关胶枪点之后;将各待涂胶物体模板以及相应轨迹信息对应存储到路径‑物体映射集合。如此,基于路径‑物体映射集合,满足多种物体的多样涂胶工艺需求。此外,实现胶枪的状态与沿需求路径移动过程
一种鞋底涂胶轨迹生成方法及装置.pdf
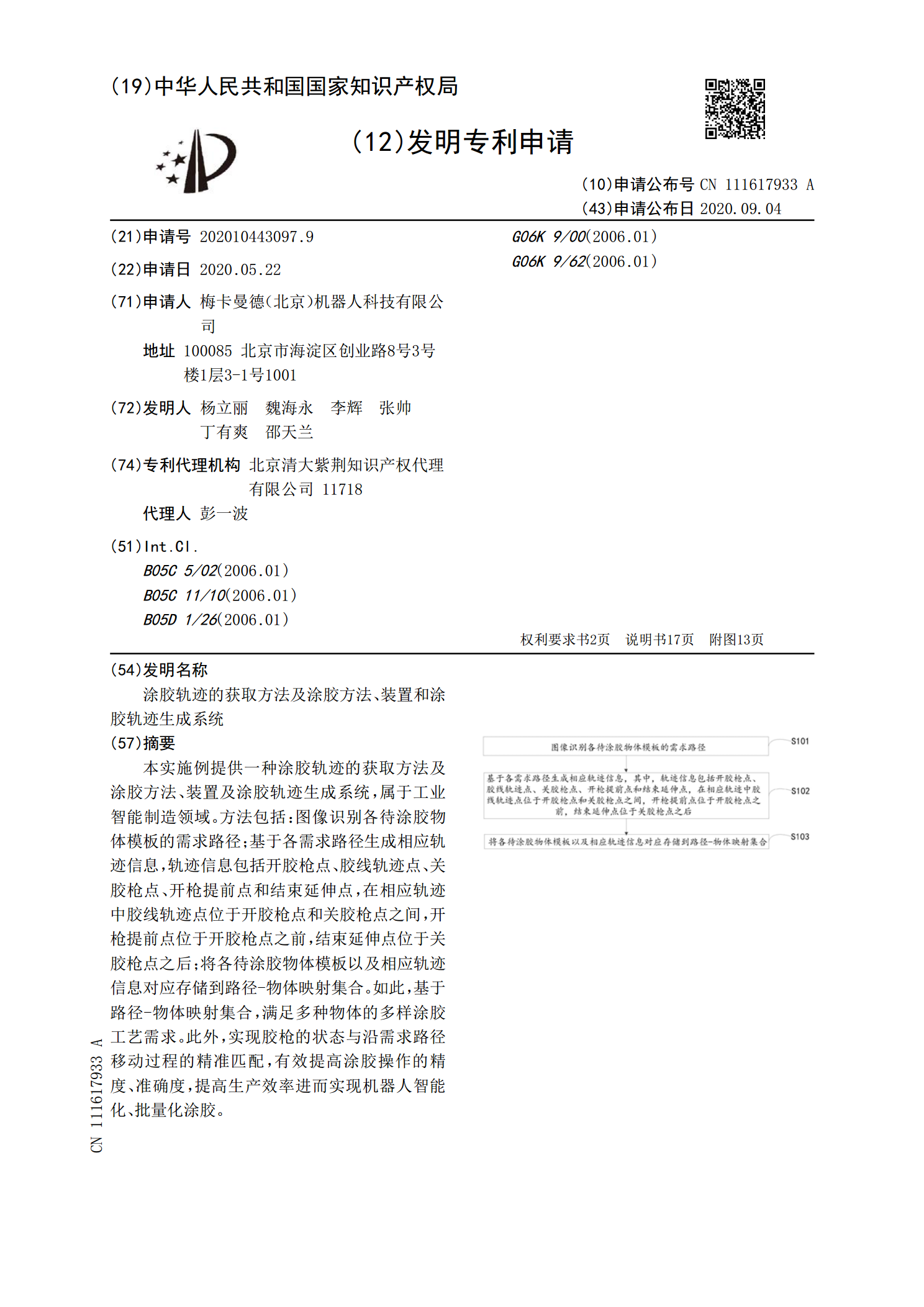
本发明提供了一种鞋底涂胶轨迹生成方法及装置,所述方法包括:获取鞋底的点云数据,根据所述鞋底的点云数据构造鞋底的空间模型,根据所述鞋底的空间模型提取鞋底外轮廓,根据所述鞋底外轮廓上的相邻点确定与所述空间模型相交的平面,所述平面垂直于所述相邻点形成的向量,且经过所述向量的起点,获取所述平面与所述空间模型的交线,以所述向量的起点为起始点,沿所述交线的方向偏移预设值确定涂胶点,根据所述鞋底外轮廓两两相邻点确定得到的涂胶点生成鞋底涂胶轨迹,提高了提取鞋底外轮廓的准确度,从而提高了鞋底涂胶的准确性,解决了现有技术中无
涂胶装置及涂胶方法.pdf
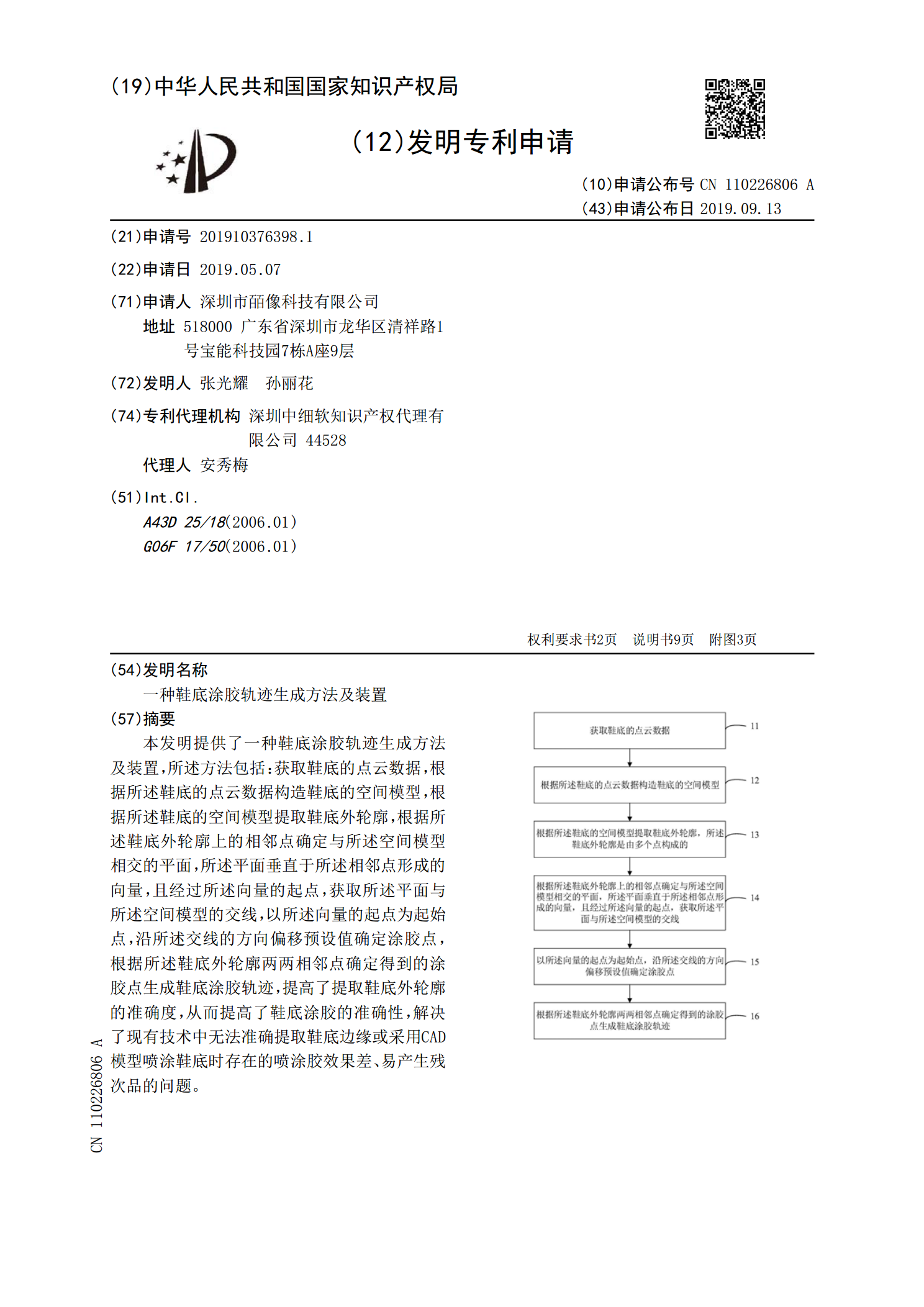
本申请涉及涂胶技术领域,尤其涉及一种涂胶装置及涂胶方法。涂胶装置包括涂胶执行器以及扫描系统,所述扫描系统用于扫描各待涂胶工件上的涂胶面与非涂胶面的外形轮廓,并计算相邻两个所述待涂胶工件堆叠后的容胶空间;所述涂胶执行器与所述扫描系统信号连接,用于根据所述容胶空间调整涂胶量,然后对所述涂胶面涂覆胶液。本申请在涂胶时不容易产生胶液不足或者溢胶的现象,进而尽量节省后续补胶与除胶的工序,能够缩短生产周期。
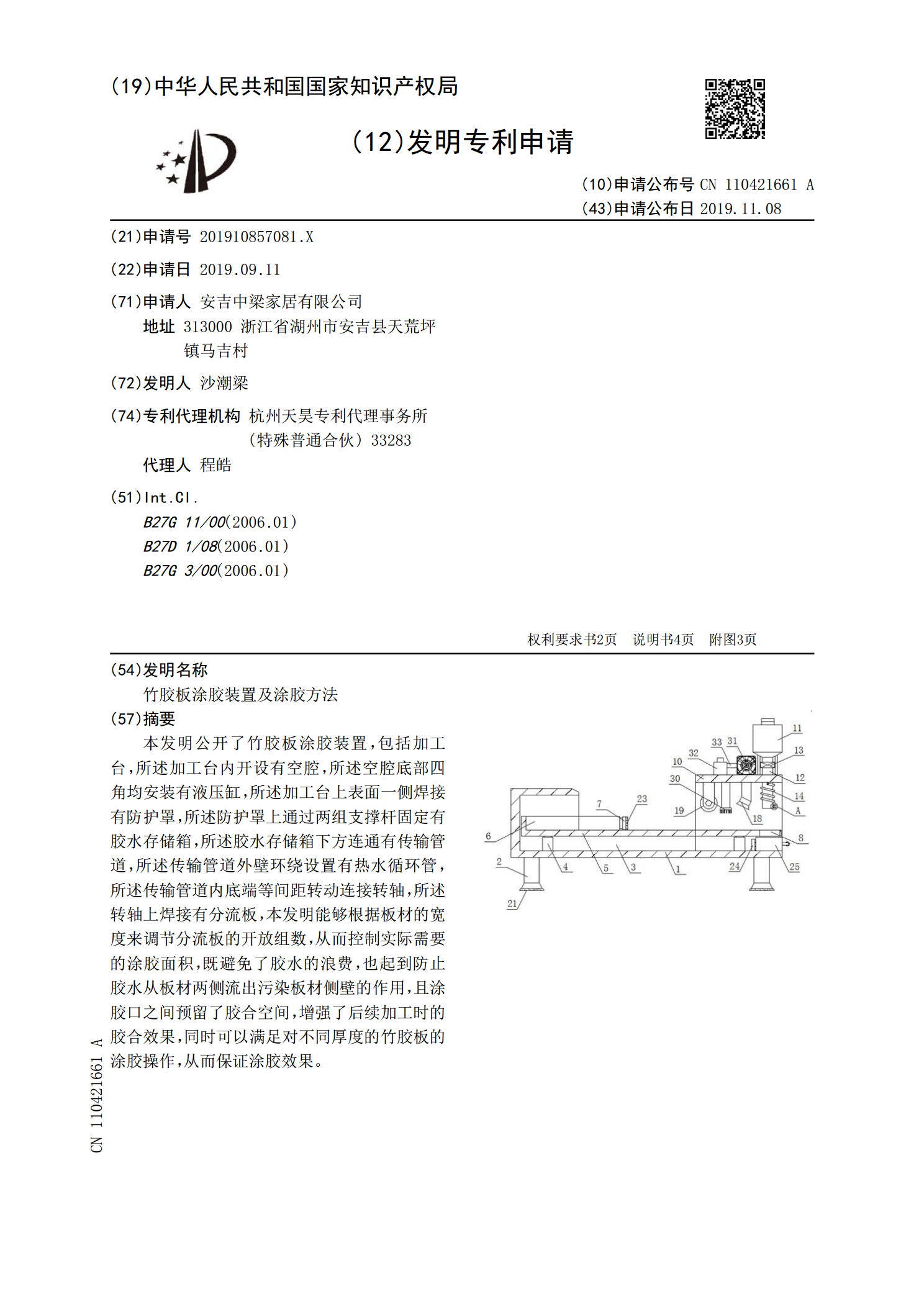
竹胶板涂胶装置及涂胶方法.pdf
本发明公开了竹胶板涂胶装置,包括加工台,所述加工台内开设有空腔,所述空腔底部四角均安装有液压缸,所述加工台上表面一侧焊接有防护罩,所述防护罩上通过两组支撑杆固定有胶水存储箱,所述胶水存储箱下方连通有传输管道,所述传输管道外壁环绕设置有热水循环管,所述传输管道内底端等间距转动连接转轴,所述转轴上焊接有分流板,本发明能够根据板材的宽度来调节分流板的开放组数,从而控制实际需要的涂胶面积,既避免了胶水的浪费,也起到防止胶水从板材两侧流出污染板材侧壁的作用,且涂胶口之间预留了胶合空间,增强了后续加工时的胶合效果,同
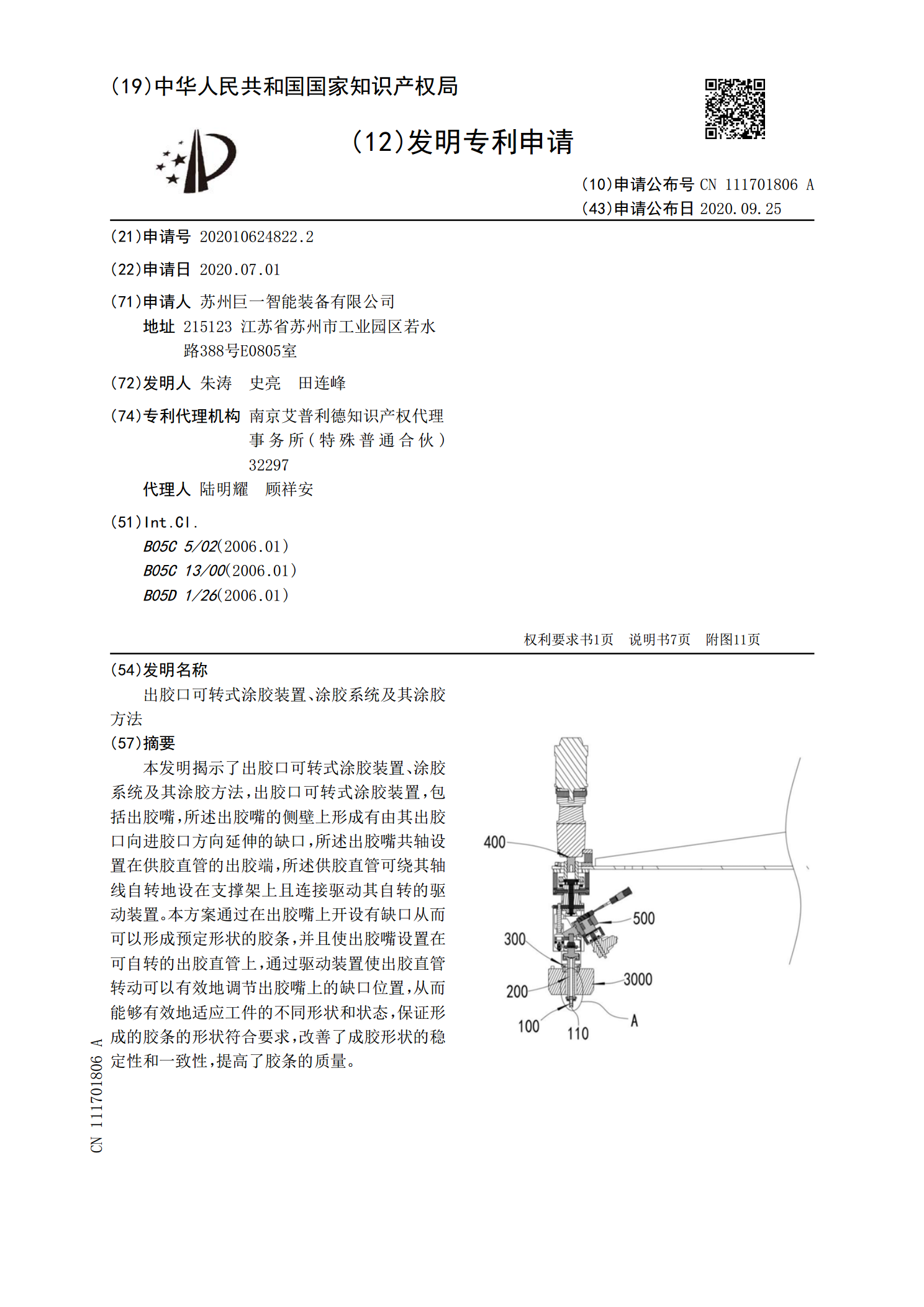
出胶口可转式涂胶装置、涂胶系统及其涂胶方法.pdf
本发明揭示了出胶口可转式涂胶装置、涂胶系统及其涂胶方法,出胶口可转式涂胶装置,包括出胶嘴,所述出胶嘴的侧壁上形成有由其出胶口向进胶口方向延伸的缺口,所述出胶嘴共轴设置在供胶直管的出胶端,所述供胶直管可绕其轴线自转地设在支撑架上且连接驱动其自转的驱动装置。本方案通过在出胶嘴上开设有缺口从而可以形成预定形状的胶条,并且使出胶嘴设置在可自转的出胶直管上,通过驱动装置使出胶直管转动可以有效地调节出胶嘴上的缺口位置,从而能够有效地适应工件的不同形状和状态,保证形成的胶条的形状符合要求,改善了成胶形状的稳定性和一致性