
一种自动抓取反应杯的机械手装置.pdf

葫芦****io

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
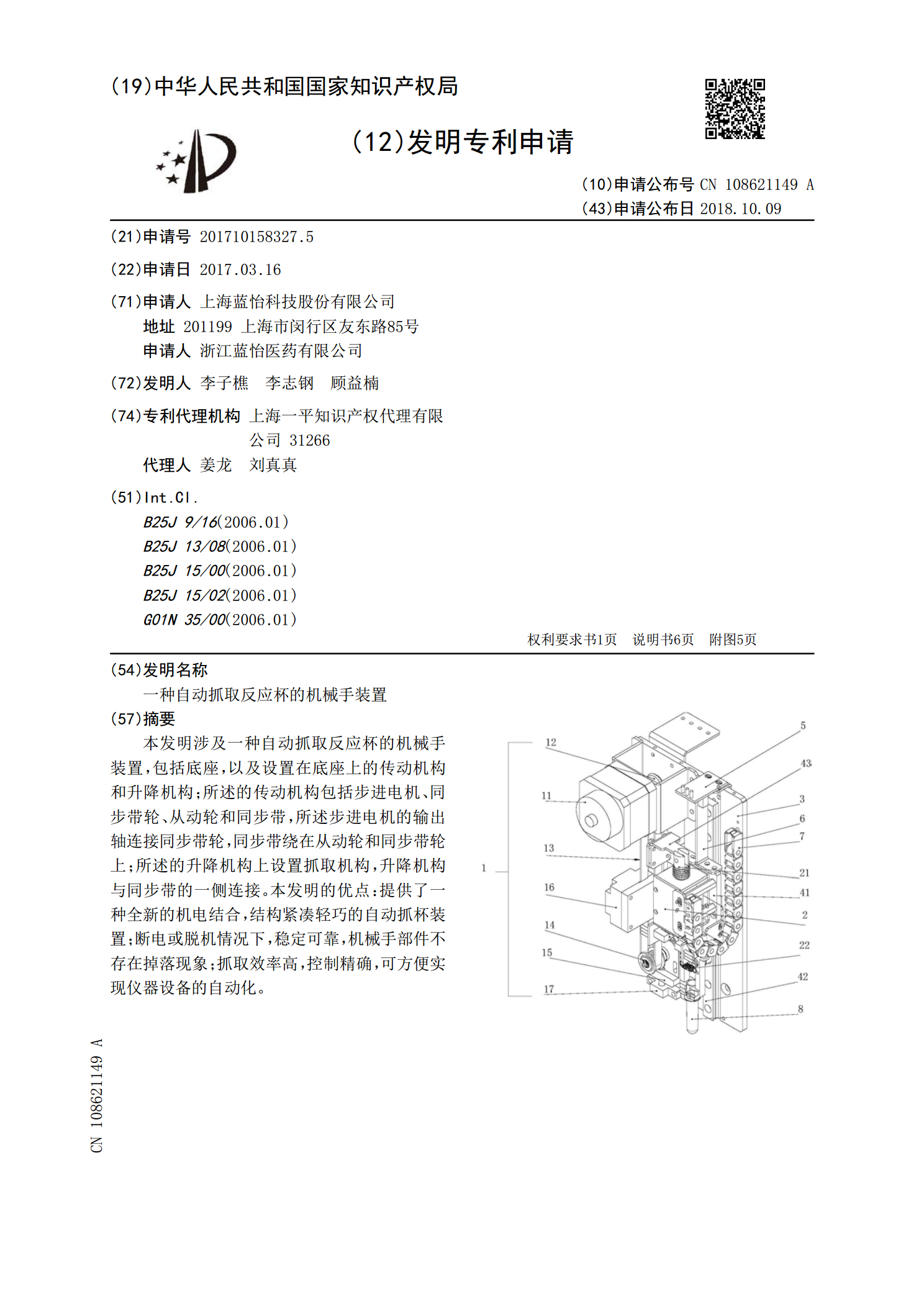
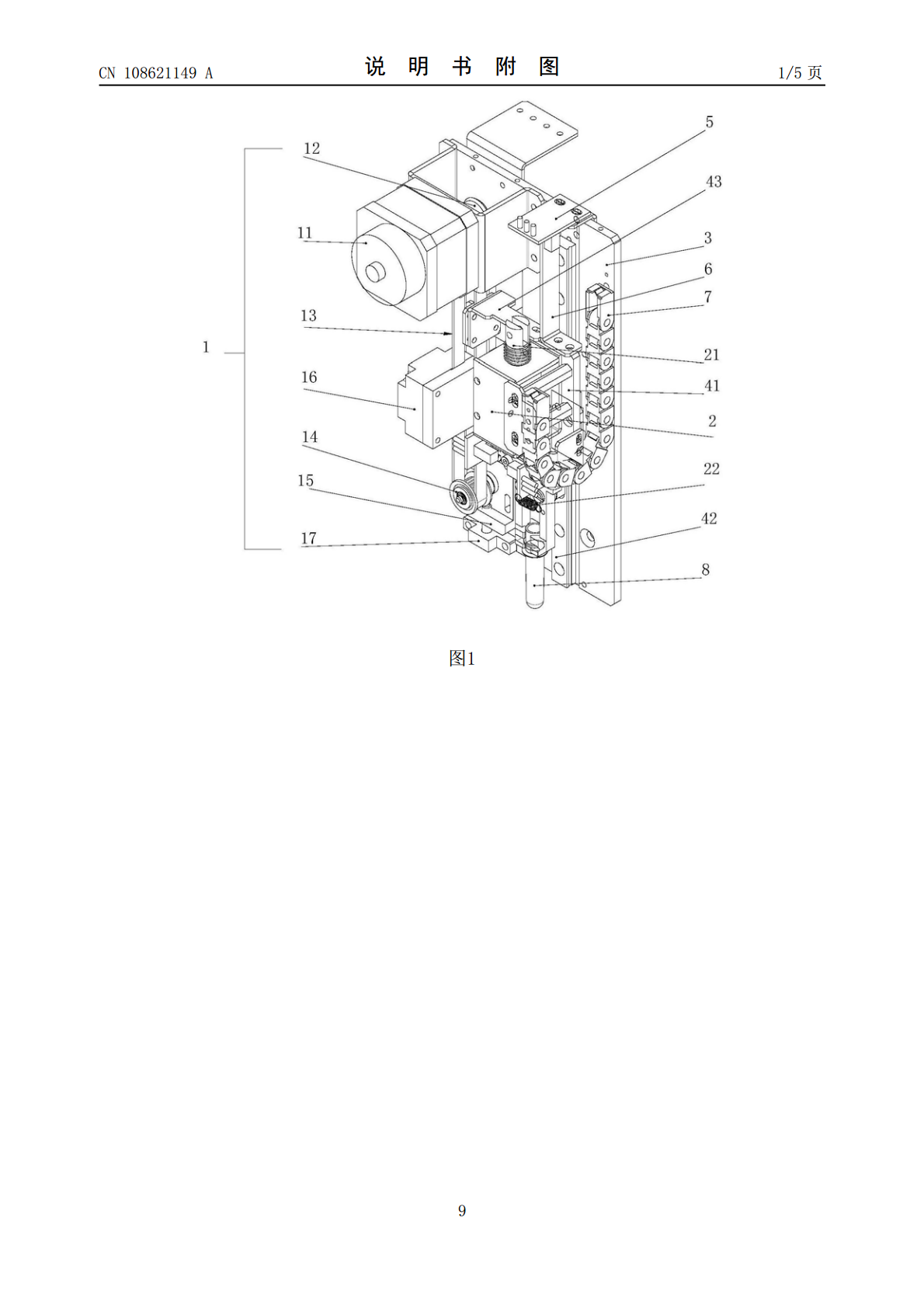
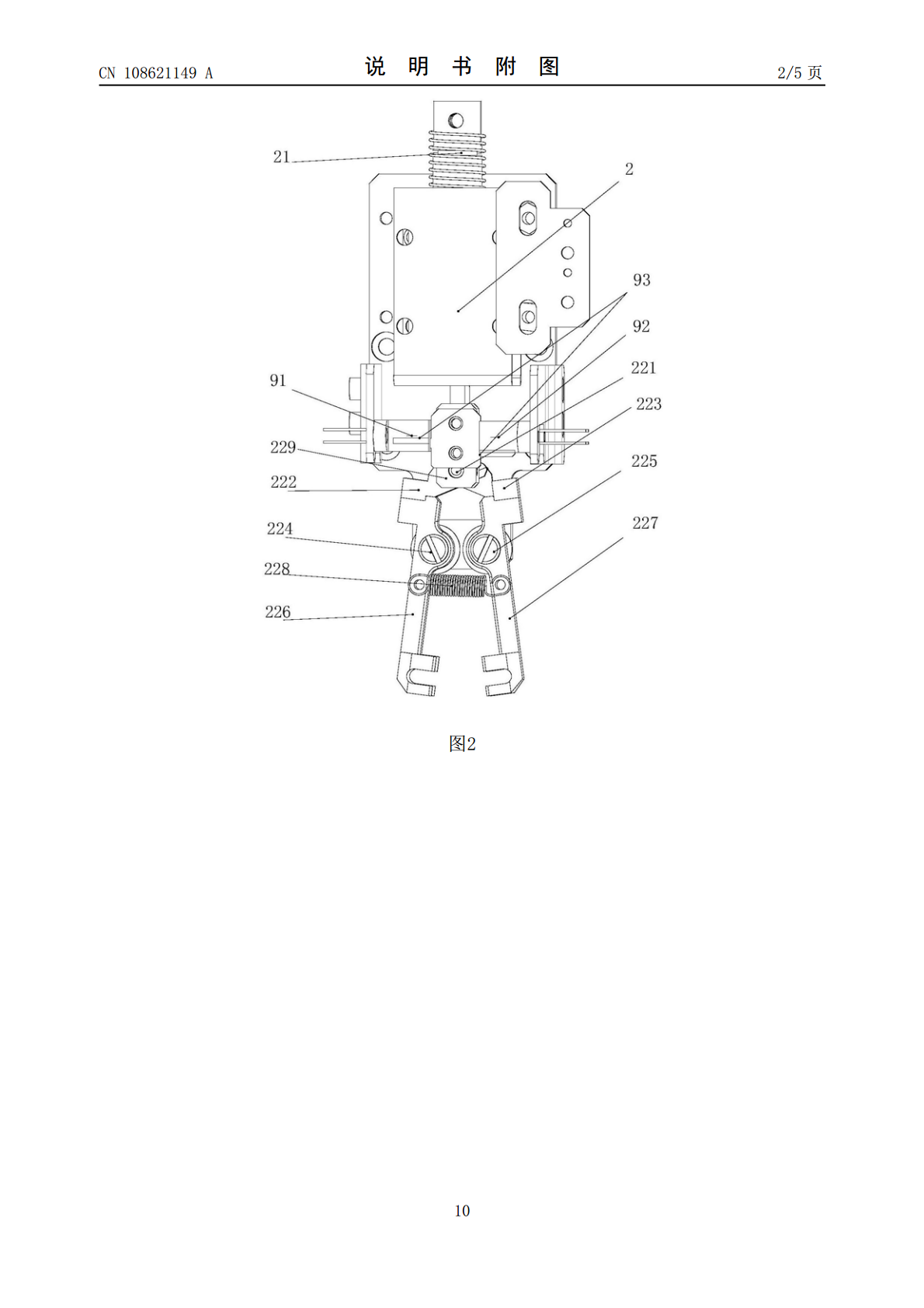
一种自动抓取反应杯的机械手装置.pdf
本发明涉及一种自动抓取反应杯的机械手装置,包括底座,以及设置在底座上的传动机构和升降机构;所述的传动机构包括步进电机、同步带轮、从动轮和同步带,所述步进电机的输出轴连接同步带轮,同步带绕在从动轮和同步带轮上;所述的升降机构上设置抓取机构,升降机构与同步带的一侧连接。本发明的优点:提供了一种全新的机电结合,结构紧凑轻巧的自动抓杯装置;断电或脱机情况下,稳定可靠,机械手部件不存在掉落现象;抓取效率高,控制精确,可方便实现仪器设备的自动化。
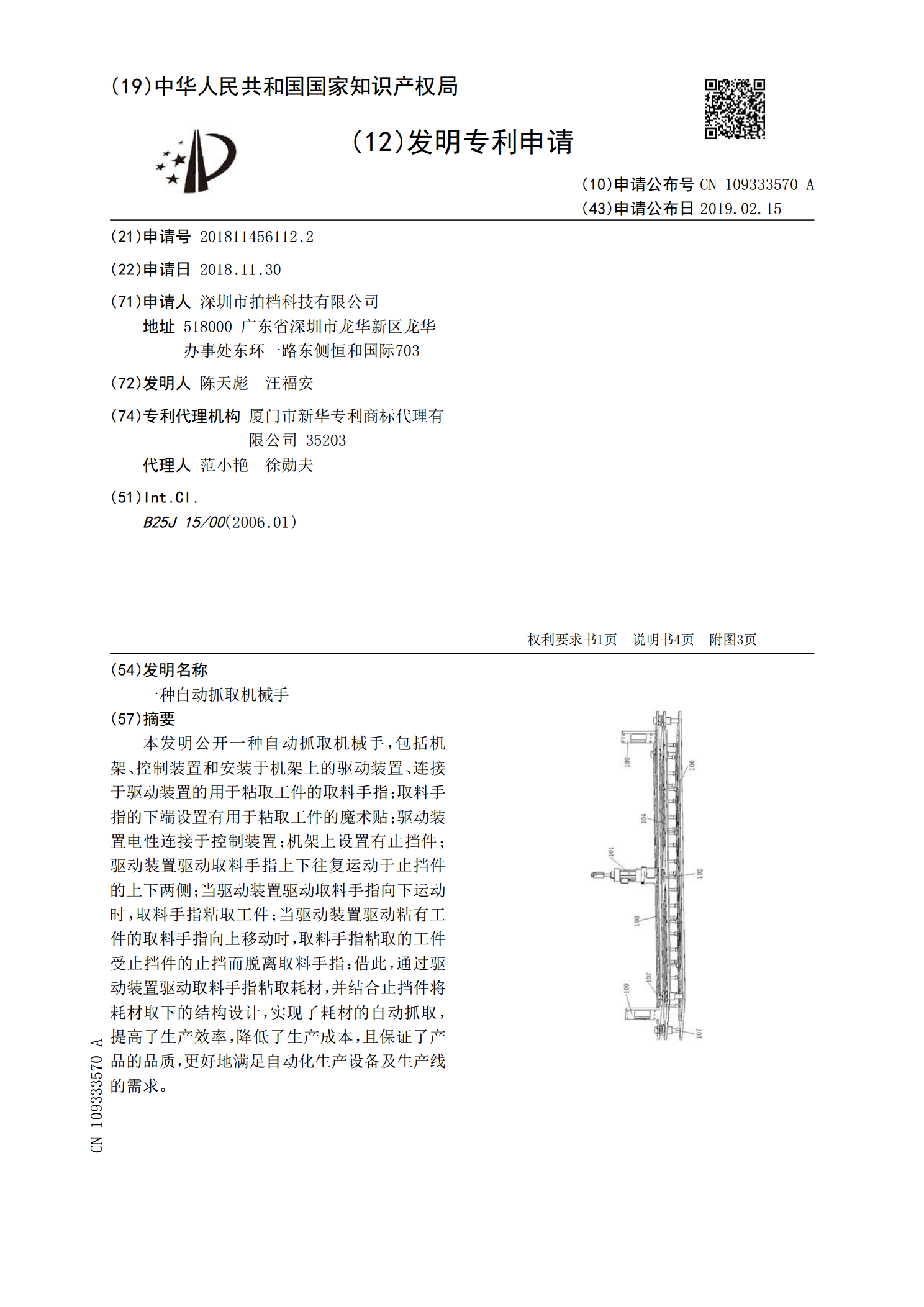
一种自动抓取机械手.pdf
本发明公开一种自动抓取机械手,包括机架、控制装置和安装于机架上的驱动装置、连接于驱动装置的用于粘取工件的取料手指;取料手指的下端设置有用于粘取工件的魔术贴;驱动装置电性连接于控制装置;机架上设置有止挡件;驱动装置驱动取料手指上下往复运动于止挡件的上下两侧;当驱动装置驱动取料手指向下运动时,取料手指粘取工件;当驱动装置驱动粘有工件的取料手指向上移动时,取料手指粘取的工件受止挡件的止挡而脱离取料手指;借此,通过驱动装置驱动取料手指粘取耗材,并结合止挡件将耗材取下的结构设计,实现了耗材的自动抓取,提高了生产效率
一种反应杯自动上料装置.pdf
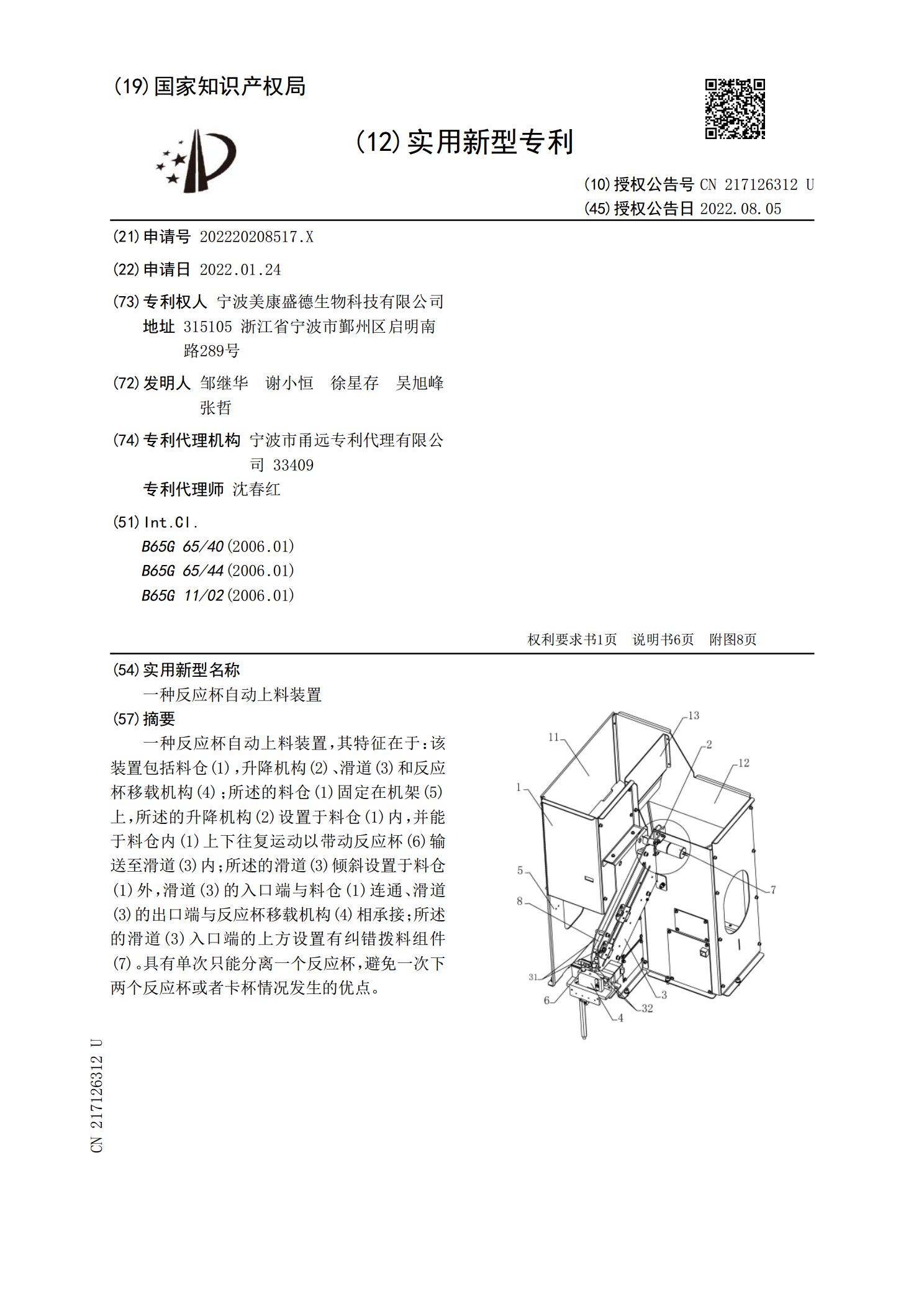
一种反应杯自动上料装置,其特征在于:该装置包括料仓(1),升降机构(2)、滑道(3)和反应杯移载机构(4);所述的料仓(1)固定在机架(5)上,所述的升降机构(2)设置于料仓(1)内,并能于料仓内(1)上下往复运动以带动反应杯(6)输送至滑道(3)内;所述的滑道(3)倾斜设置于料仓(1)外,滑道(3)的入口端与料仓(1)连通、滑道(3)的出口端与反应杯移载机构(4)相承接;所述的滑道(3)入口端的上方设置有纠错拨料组件(7)。具有单次只能分离一个反应杯,避免一次下两个反应杯或者卡杯情况发生的优点。

一种皮带式自动智能机械手臂光盘抓取装置.pdf
本发明公开了一种皮带式自动智能机械手臂光盘抓取装置,其特征在于,该装置包括控制单元及抓取单元,通过机械臂抓取单元实现了全自动单片顺序抓取光盘,节省人工时间成本,加快工作进度,机械臂抓取单元通过限位铁片、抓持端子控制抓取光盘数量,实现每次执行抓取单张光盘,快速、精准,避免了人工抓盘、放盘制造误差,省时省力,并自动放置目标刻录机中,避免了人工抓放盘时在光盘上遗留的指纹、油渍、灰尘,增加光盘刻录成功率,使刻录机、打印机内部整洁,控制单元采用步进电机、电磁阀为低能耗部件,仅工作时通电,无污染、不浪费电,智能精准抓
一种可翻转自动抓取机械手.pdf
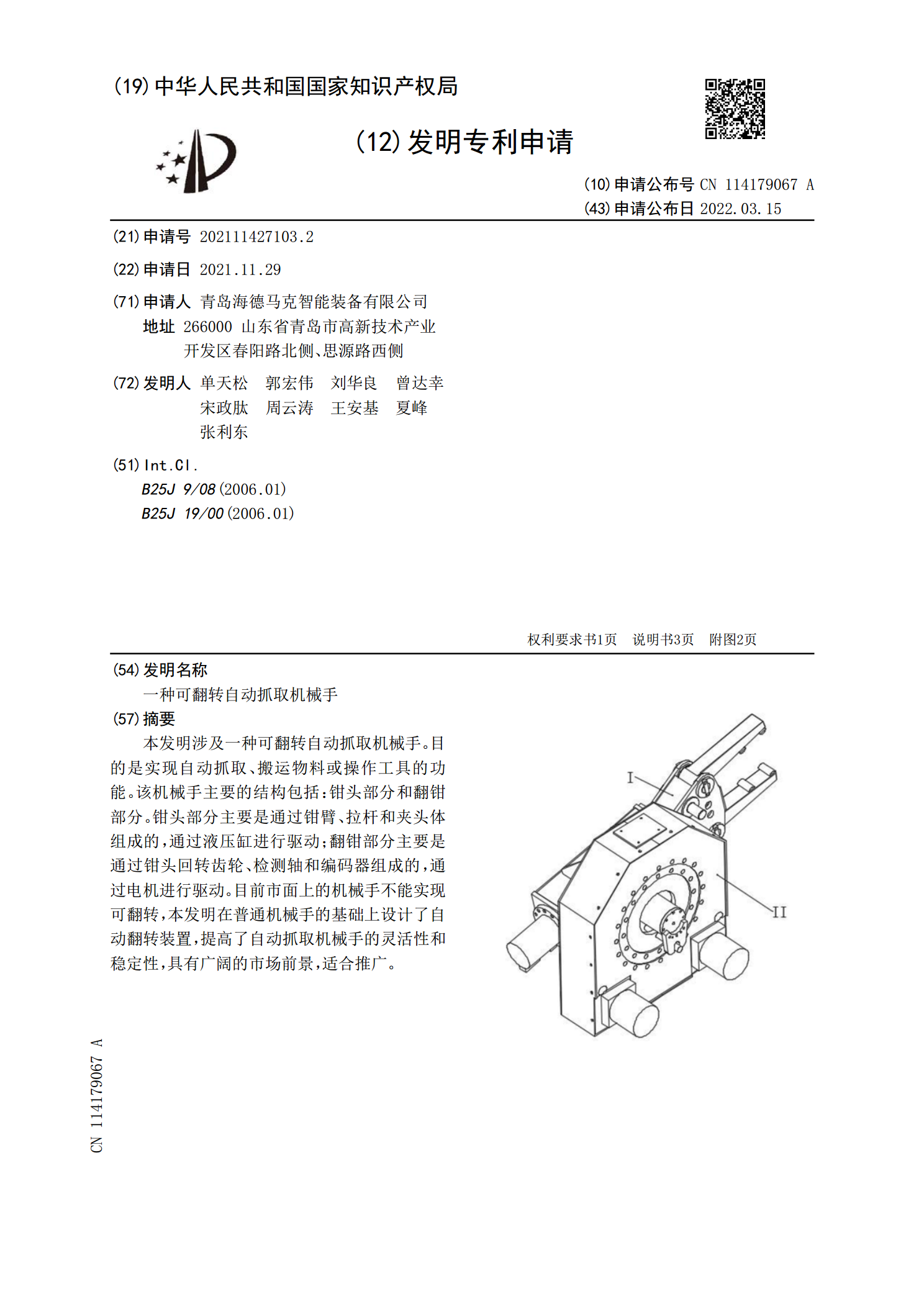
本发明涉及一种可翻转自动抓取机械手。目的是实现自动抓取、搬运物料或操作工具的功能。该机械手主要的结构包括:钳头部分和翻钳部分。钳头部分主要是通过钳臂、拉杆和夹头体组成的,通过液压缸进行驱动;翻钳部分主要是通过钳头回转齿轮、检测轴和编码器组成的,通过电机进行驱动。目前市面上的机械手不能实现可翻转,本发明在普通机械手的基础上设计了自动翻转装置,提高了自动抓取机械手的灵活性和稳定性,具有广阔的市场前景,适合推广。