
自走式缠绕机器人.pdf

安双****文章


1/10

2/10
3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自走式缠绕机器人.pdf
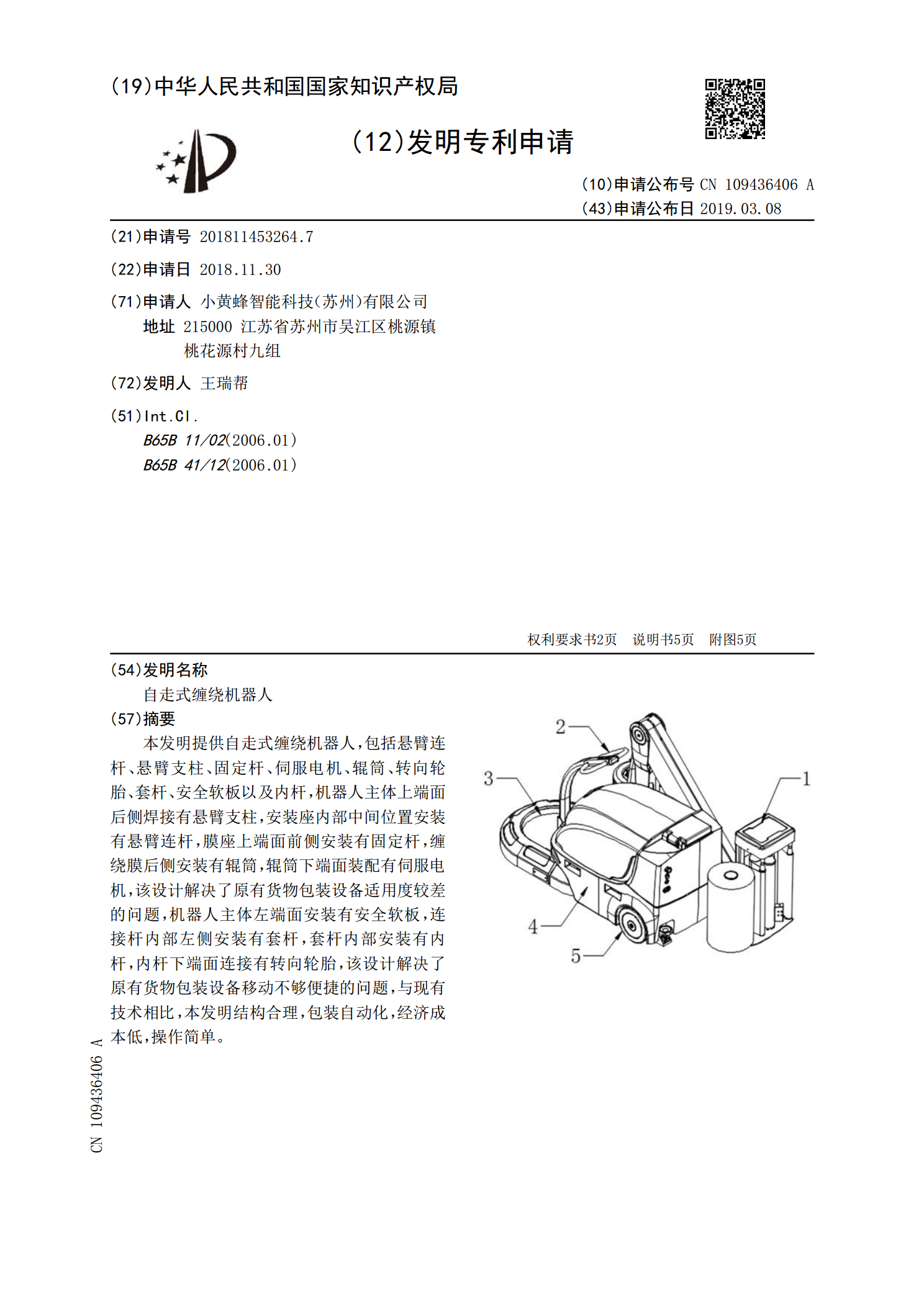
本发明提供自走式缠绕机器人,包括悬臂连杆、悬臂支柱、固定杆、伺服电机、辊筒、转向轮胎、套杆、安全软板以及内杆,机器人主体上端面后侧焊接有悬臂支柱,安装座内部中间位置安装有悬臂连杆,膜座上端面前侧安装有固定杆,缠绕膜后侧安装有辊筒,辊筒下端面装配有伺服电机,该设计解决了原有货物包装设备适用度较差的问题,机器人主体左端面安装有安全软板,连接杆内部左侧安装有套杆,套杆内部安装有内杆,内杆下端面连接有转向轮胎,该设计解决了原有货物包装设备移动不够便捷的问题,与现有技术相比,本发明结构合理,包装自动化,经济成本低,
自走式缠绕机、缠绕系统以及方法.pdf
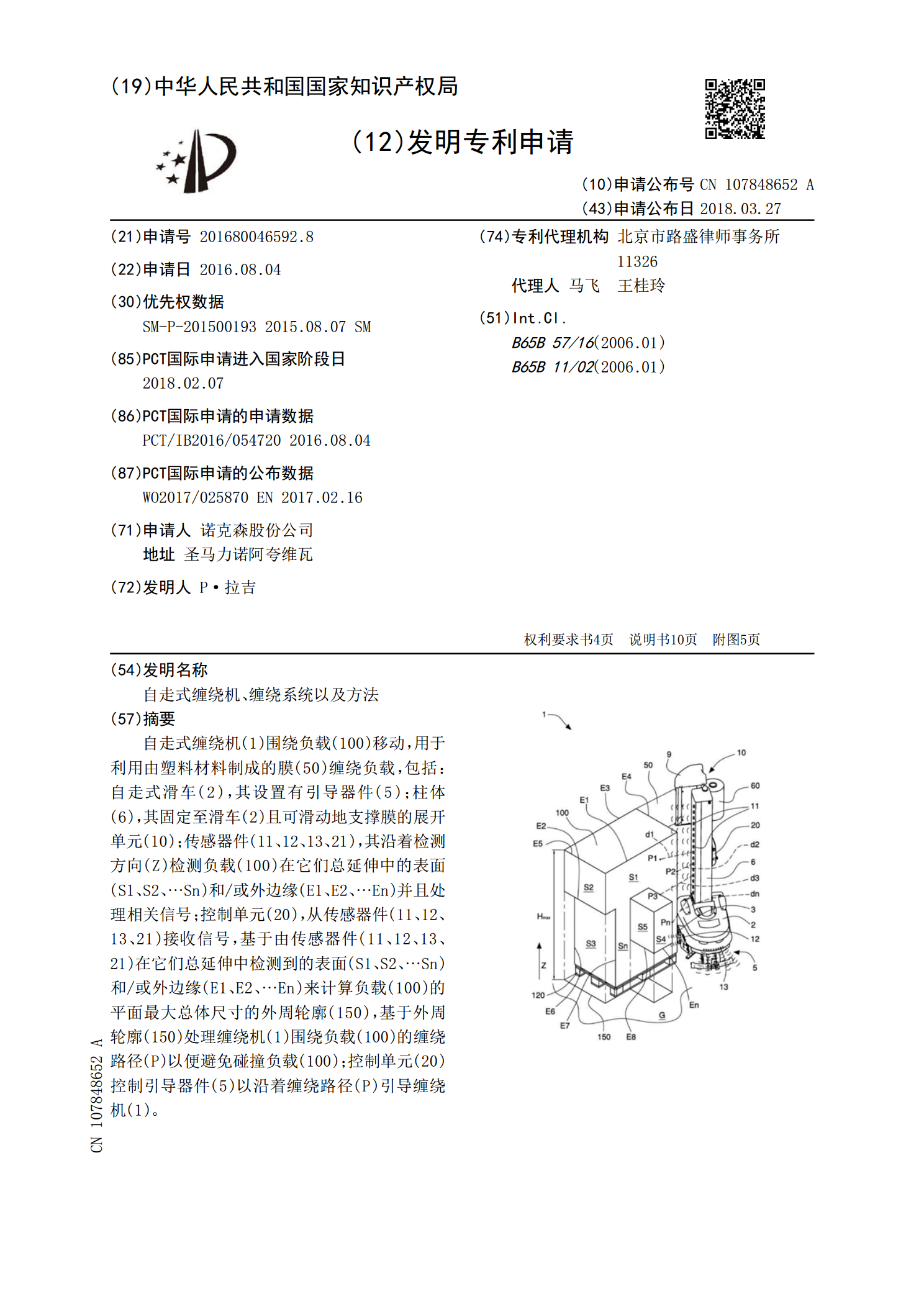
自走式缠绕机(1)围绕负载(100)移动,用于利用由塑料材料制成的膜(50)缠绕负载,包括:自走式滑车(2),其设置有引导器件(5);柱体(6),其固定至滑车(2)且可滑动地支撑膜的展开单元(10);传感器件(11、12、13、21),其沿着检测方向(Z)检测负载(100)在它们总延伸中的表面(S1、S2、…Sn)和/或外边缘(E1、E2、…En)并且处理相关信号;控制单元(20),从传感器件(11、12、13、21)接收信号,基于由传感器件(11、12、13、21)在它们总延伸中检测到的表面(S1、S2
一种自走式农田喷药机器人.pdf
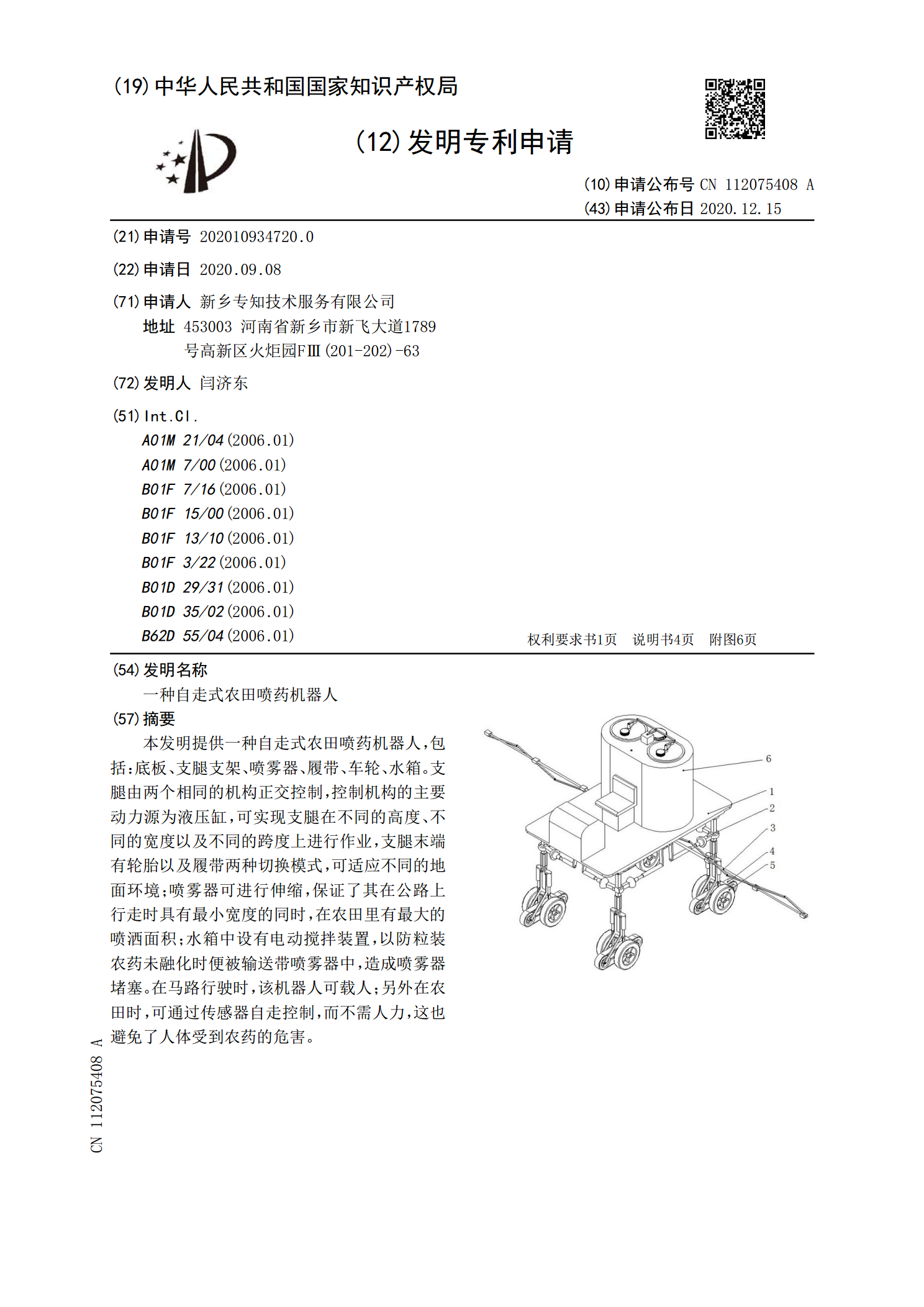
本发明提供一种自走式农田喷药机器人,包括:底板、支腿支架、喷雾器、履带、车轮、水箱。支腿由两个相同的机构正交控制,控制机构的主要动力源为液压缸,可实现支腿在不同的高度、不同的宽度以及不同的跨度上进行作业,支腿末端有轮胎以及履带两种切换模式,可适应不同的地面环境;喷雾器可进行伸缩,保证了其在公路上行走时具有最小宽度的同时,在农田里有最大的喷洒面积;水箱中设有电动搅拌装置,以防粒装农药未融化时便被输送带喷雾器中,造成喷雾器堵塞。在马路行驶时,该机器人可载人;另外在农田时,可通过传感器自走控制,而不需人力,这也
机器人吸尘器及自走式设备.pdf
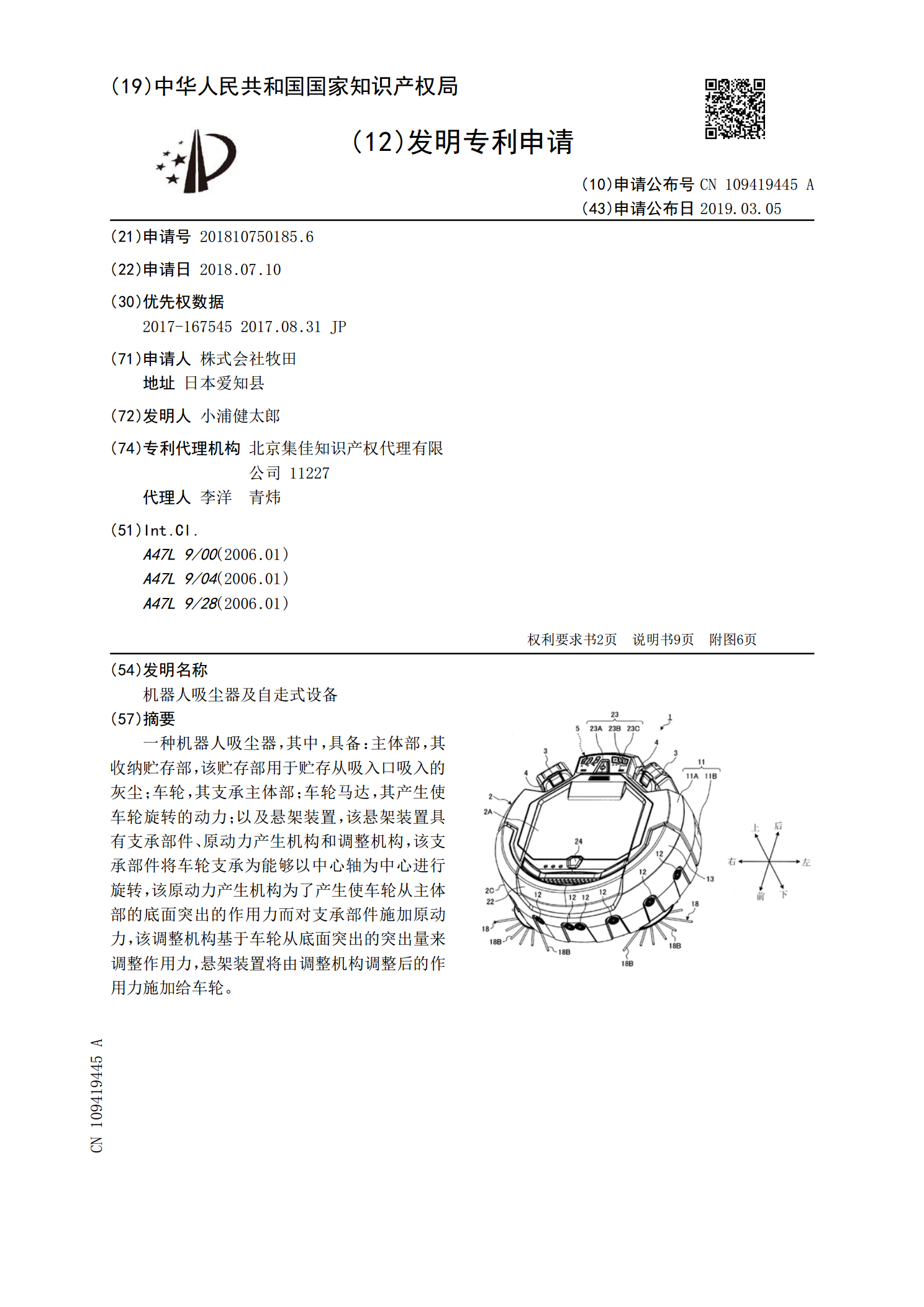
一种机器人吸尘器,其中,具备:主体部,其收纳贮存部,该贮存部用于贮存从吸入口吸入的灰尘;车轮,其支承主体部;车轮马达,其产生使车轮旋转的动力;以及悬架装置,该悬架装置具有支承部件、原动力产生机构和调整机构,该支承部件将车轮支承为能够以中心轴为中心进行旋转,该原动力产生机构为了产生使车轮从主体部的底面突出的作用力而对支承部件施加原动力,该调整机构基于车轮从底面突出的突出量来调整作用力,悬架装置将由调整机构调整后的作用力施加给车轮。
一种自走式黄瓜收获机器人.pdf
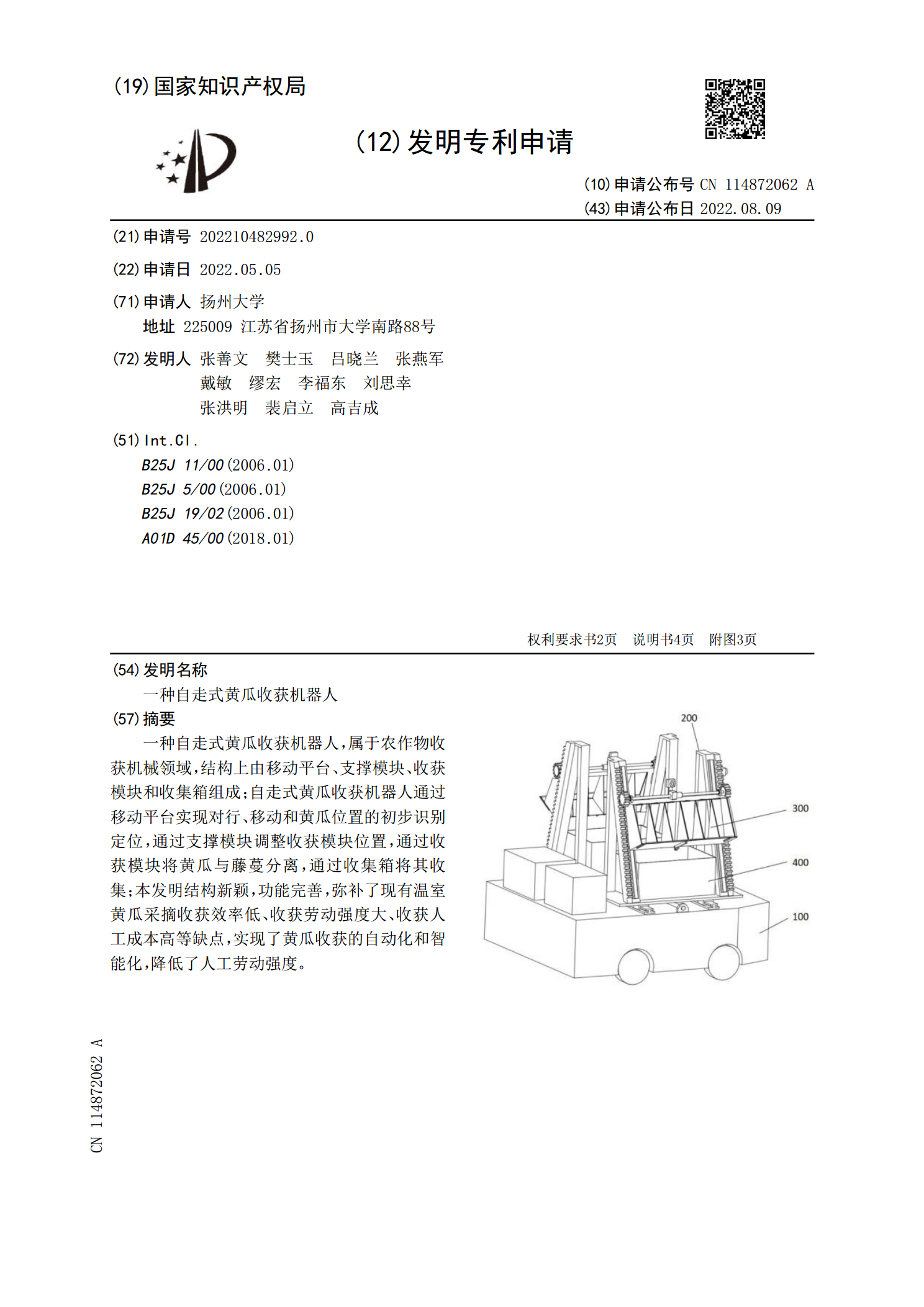
一种自走式黄瓜收获机器人,属于农作物收获机械领域,结构上由移动平台、支撑模块、收获模块和收集箱组成;自走式黄瓜收获机器人通过移动平台实现对行、移动和黄瓜位置的初步识别定位,通过支撑模块调整收获模块位置,通过收获模块将黄瓜与藤蔓分离,通过收集箱将其收集;本发明结构新颖,功能完善,弥补了现有温室黄瓜采摘收获效率低、收获劳动强度大、收获人工成本高等缺点,实现了黄瓜收获的自动化和智能化,降低了人工劳动强度。